一种海上风电水下机器人检测探头搭载装置的制作方法
1.本实用新型属于海上风电水下检测领域,具体为一种海上风电水下机器人检测探头搭载装置。
背景技术:
2.随着我国海上风电的持续发展,海上风电水下检测需求日益增长,特别是海上风电水下结构的金属探伤。传统的检测方法一般是由潜水员使用手持检测仪器进行潜水作业,近年来也有使用水下机器人搭载探伤设备探头进行水下检测作业,但多采用固定探头,一次仅能检测一处位置,更换位置时需要操作水下机器人移动,进行重新定位,操作复杂,作业效率较低。
技术实现要素:
3.本实用新型的目的在于提供一种海上风电水下机器人检测探头搭载装置,解决了现有技术中存在的上述问题,本实用新型每次检测水下机器人保持位置不动,通过该装置可以使检测探头沿焊缝位置进行移动,进行连续检测,从而提高了检测作业效率。
4.为了达到上述目的,本实用新型采用的技术方案是:
5.本实用新型提供的一种海上风电水下机器人检测探头搭载装置,包括安装桁架、导向横架和移动安装座,其中,所述安装桁架的上表面与水下机器人连接;所述安装桁架的下表面固定导向横架,所述移动安装座滑动安装在导向横架上;所述移动安装座上安装有检测探头。
6.优选地,所述安装桁架为长条形结构,其上表面沿轴向均布有多个固定连接柱,每个固定连接柱的上端设置有固定安装块;通过固定安装块与水下机器人连接。
7.优选地,所述导向横架为长条形结构,所述导向横架的两侧壁上均开设有限位导向槽;所述限位导向槽与移动安装座相配合。
8.优选地,所述移动安装座的上表面开设有上端口,所述上端口卡装在导向横架上开设的限位导向槽上。
9.优选地,所述移动安装座上安装有用于驱动移动安装座来回移动的驱动机构。
10.优选地,所述驱动机构包括驱动电机,所述驱动电机的输出轴连接有驱动齿轮;所述驱动齿轮和安装在导向横架下端的传递齿条啮合连接。
11.优选地,所述移动安装座上开设的上端口的两侧壁上均安装有导向滚轮,所述导向滚轮滑动安装在导向横架上开设的限位导向槽内。
12.优选地,所述移动安装座的侧壁上开安装有固定安装条,所述固定安装条的两端均安装有固定端头;所述固定安装条和两个固定端头形成门型结构;每个固定端头的自由端均安装有一个清扫毛刷,所述清扫毛刷的工作端与导向横架上设置的传动齿条相接触。
13.与现有技术相比,本实用新型的有益效果是:
14.本实用新型提供的一种海上风电水下机器人检测探头搭载装置,可有效解决现有
的水下机器人搭载的检测探头多为固定点安装,考虑到其检测范围有限,不能进行连续移动检测的问题,结合本装置中移动安装座沿导向横架来回移动,带动检测探头沿着导向横架下方往复移动,有效实现检测探头的连续移动检测功能,进而提高水下检测作业效率。
15.进一步的,通过驱动电机的输出端带动驱动齿轮在驱动内腔内部转动,结合驱动齿轮与传动齿条啮合连接,驱动齿轮将与传动齿条发生啮合驱动,结合移动安装座与传动齿条的套接关系,传动齿条将反向驱动移动安装座整体沿着导向横架下端滑动,进而带动检测探头沿着导向横架下方移动,结合控制器控制驱动电机正反转动工作,可带动检测探头往复移动。
16.进一步的,本装置中在移动安装座整体移动的过程中,由于导向滚轮外表面贴合于限位导向槽的侧壁表面,进而通过摩擦可带动导向滚轮转动,通过导向滚轮的滚动效果,可保证移动安装座的移动过程更为稳定,同时在移动安装座往复移动的过程中将通过固定安装条带动两侧的固定端头同步移动,进而固定端头将带动端部的清扫毛刷移动,清扫毛刷可将传动齿条表面的泥沙清扫干净,以防止传动齿条与驱动齿轮不能正常啮合传动工作。
附图说明
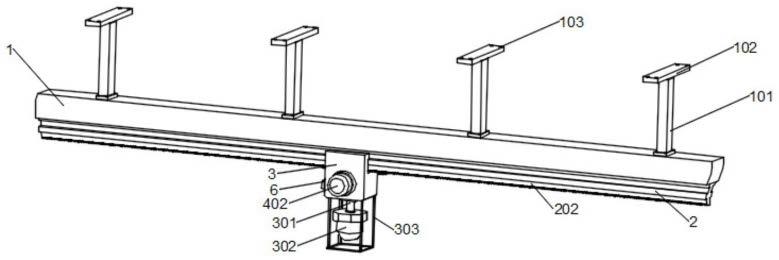
17.图1为本实用新型整体结构立体示意图;
18.图2为本实用新型移动安装座内部结构示意图;
19.图3为本实用新型移动安装座前侧表面局部结构示意图;
20.图4为本实用新型移动安装座背部表面局部结构示意图;
21.图5为图4中a处结构放大示意图。
22.图中:1、安装桁架;101、固定连接柱;102、固定安装块;103、预留安装孔;2、导向横架;201、限位导向槽;202、传动齿条;3、移动安装座;301、安装短柱;302、检测探头;303、外部保护罩;304、固定安装条;305、固定端头;306、清扫毛刷;4、安装孔位;401、驱动内腔;402、驱动电机;403、驱动齿轮;5、侧槽口;501、转动连接轴;502、导向滚轮;6、控制器。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
24.实施例一
25.参考图1-5所示,本实用新型提供的一种海上风电水下机器人检测探头搭载装置,包括安装桁架1、导向横架2和移动安装座3,其中,所述安装桁架1可以是耐腐蚀铝合金材质,安装桁架1呈长条状,安装桁架1上表面等距固定安装有固定连接柱101,每个固定连接柱101上端均固定安装有固定安装块102,固定安装块102四个顶角处均开通有便于安装固定的预留安装孔103。
26.安装桁架1的下表面固定安装有导向横架2,导向横架2两侧表面对称开设有限位导向槽201。
27.导向横架2上套设有可实现移动效果的移动安装座3,且移动安装座3上端开设有上端口,所述上端口与限位导向槽201相配合,实现移动安装座3的来回移动。
28.移动安装座3下表面固定安装有安装短柱301,移动安装座3下方通过安装短柱301固定安装有检测探头302。
29.基于以上结构,本装置中的安装桁架1可通过固定连接柱101和固定安装块102固定水下机器人结构框上,且预留安装孔103方便了固定安装块102用螺栓固定,同时移动安装座3可通过驱动作用沿着导向横架2下表面往复滑动,进而可带动检测探头302往复移动,有效实现检测探头302的连续移动检测功能。
30.实施例二
31.结合图1、图2、图3、图4和图5所示,基于上述实施例1,移动安装座3前侧上方开设有安装孔位4,移动安装座3内部开设有驱动内腔401,安装孔位4内部固定安装有用以驱动动力提供的驱动电机402,且驱动电机402输出端部贯穿至驱动内腔401内部,驱动内腔401内部转动安装的驱动齿轮403,且驱动齿轮403与驱动电机402输出端部同轴固定。
32.导向横架2下表面固定安装有传动齿条202,驱动内腔401与移动安装座3上开设的上端口相通,且驱动齿轮403外表面与传动齿条202对应啮合连接,驱动电机402工作时,驱动电机402的输出端部将带动驱动齿轮403在驱动内腔401内部转动,结合驱动齿轮403与传动齿条202啮合连接,驱动齿轮403将与传动齿条202发生啮合驱动,结合移动安装座3与传动齿条202的套接关系,传动齿条202将反向驱动移动安装座3整体沿着导向横架2下端滑动,进而带动检测探头302沿着导向横架2下方移动,结合控制器6控制驱动电机402正反转动工作,进而可实现检测探头302的往复移动,有效实现检测探头302的连续移动检测功能。
33.实施例三
34.结合图1图2、图3和图4所示,基于上述实施例1或2,移动安装座3上端口两侧侧壁表面均等距开设有两组侧槽口5,每组侧槽口5的上下壁之间均转动安装有转动连接轴501,每组转动连接轴501的外表面位于侧槽口5内均固定套接有导向滚轮502,移动安装座3通过上端口卡合于导向横架2外表面,且导向滚轮502活动卡合于限位导向槽201内部,且导向滚轮502与限位导向槽201内壁表面滚动配合,在移动安装座3整体移动的过程中,由于导向滚轮502外表面贴合于限位导向槽201的侧壁表面,进而通过摩擦可带动导向滚轮502转动,通过导向滚轮502的滚动效果,可保证移动安装座3的移动过程更为稳定。
35.实施例四
36.结合图1和图4所示,基于上述实施例1、2或3,移动安装座3的左侧侧表面固定安装有控制器6,且控制器6和驱动电机402之间电性连接,控制器6与水下机器人的控制模块连接,在装置正常工作时,水下机器人的操作人员通过向控制器6发送信号,控制器6可控制驱动电机402进行正反向转动工作。
37.实施例五
38.结合图1、图3和图4所示,基于上述实施例1、2、3或4,移动安装座3的下表面固定安装有长方体状的外部保护罩303,且外部保护罩303套设于检测探头302的外部,且外部保护罩303采用透明的耐压材料制成,外部保护罩303具有一定的密封及保护效果,具有透明效果,进而不妨碍检测探头302的正常监控。
39.实施例五
40.结合图4所示,基于上述实施例1、2、3、4或5,移动安装座3的背部表面固定安装有固定安装条304,固定安装条304两端均固定安装有固定端头305,固定端头305靠近传动齿
条202的表面均固定安装有清扫毛刷306,在移动安装座3往复移动的过程中将通过固定安装条304带动两侧的固定端头305同步移动,进而固定端头305将带动端部的清扫毛刷306移动,清扫毛刷306可将传动齿条202表面的泥沙清扫干净,以防止传动齿条202与驱动齿轮403不能正常啮合传动工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1