连接组件、器械臂及手术机器系统的制作方法
1.本实用新型涉及医疗器械技术领域,更具体地说,涉及一种连接组件、器械臂及手术机器系统。
背景技术:
2.手术机器人的手术器械布置在器械盒中,器械盒在器械臂的直线轴结构上进行滑移,器械臂还具有多自由度的多个臂件,多个臂件的末端与直线轴结构连接,臂件末端与直线轴结构的连接稳定性,对器械盒内手术器械的工作稳定性有着重要影响。
技术实现要素:
3.有鉴于此,本实用新型提供了一种连接组件、器械臂及手术机器系统,以实现直线轴结构和臂件的快速连接。
4.为了达到上述目的,本实用新型提供如下技术方案:
5.一种连接组件,包括第一连接部和第二连接部,所述第一连接部包括可拆装连接的第一安装支架和第一紧固件,所述第二连接部包括可拆装连接的第二安装支架和第二紧固件;
6.所述第二安装支架具有与所述第一紧固件压紧配合的限位支撑部,所述第二紧固件具有与所述第一紧固件卡装配合的卡装连接部,所述限位支撑部和所述卡装连接部的安装方向呈反向布置结构。
7.优选地,在上述连接组件中,所述第一紧固件具有连接凸台,所述第二安装支架具有与所述连接凸台插装配合的安装孔。
8.优选地,在上述连接组件中,所述连接凸台为插装端向内倾斜的斜度凸台,所述安装孔为斜面安装孔;
9.所述斜度凸台和所述斜面安装孔压紧配合围成所述限位支撑部。
10.优选地,在上述连接组件中,所述第二安装支架为外圈设有连接螺纹的柱状安装支架,所述第二紧固件与所述柱状安装支架螺纹连接的锁紧套筒;
11.所述第一紧固件上布置环形压紧部,所述锁紧套筒的根部向内伸出有卡装于所述环形压紧部上的环形连接部。
12.优选地,在上述连接组件中,所述环形压紧部上伸出有防呆凸台,所述柱状安装支架上开设防呆凹槽,所述防呆凸台沿轴向落入所述防呆凹槽内。
13.优选地,在上述连接组件中,所述锁紧套筒的外壁面上还布置有对所述柱状安装支架径向锁紧的紧固螺钉。
14.优选地,在上述连接组件中,所述第一安装支架和所述第一紧固件之间布置有沿轴向连接二者的连接螺栓,以及对所述第一紧固件的安装位置进行预定位的定位销。
15.优选地,在上述连接组件中,所述斜度凸台的内部还预留有过线通道。
16.一种器械臂,具有臂件和安装器械盒的直线轴结构,所述臂件和所述直线轴结构
之间采用如上任一项所述的连接组件,所述第一安装支架为直线轴连接架,所述第二安装支架上设置连接所述臂件的凹槽结构的连接接口。
17.一种手术机器人,其具有进行手术操作的器械臂系统,所述器械臂系统具有器械臂,所述器械臂为如上所述的器械臂。
18.本实用新型提供的连接组件,包括第一连接部和第二连接部,第一连接部包括可拆装连接的第一安装支架和第一紧固件,第二连接部包括可拆装连接的第二安装支架和第二紧固件;第二安装支架具有与第一紧固件压紧配合的限位支撑部,第二紧固件具有与第一紧固件卡装配合的卡装连接部,限位支撑部和卡装连接部的安装方向呈反向布置结构。第一连接部和第二连接部相连进行不同组件的连接,第二连接部由限位支撑部压紧到第一紧固件上,第二紧固件连接第二安装支架的同时,由卡装连接部卡装连接到第一紧固件上,通过将限位支撑部和卡装连接部呈基本反向的布置结构,使得第一紧固件由第二安装支架和第二紧固件同时夹紧,进而实现了第一连接部和第二连接部的快速连接。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本技术提供的连接组件的爆炸视图;
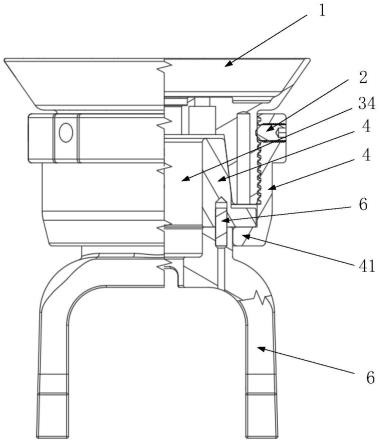
21.图2为本技术提供的连接组件装配总成的剖视结构示意图。
具体实施方式
22.本实用新型公开了一种连接组件、器械臂及手术机器系统,实现了直线轴结构和臂件的快速连接。
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.如图1和图2所示,图1为本技术提供的连接组件的爆炸视图;图2为本技术提供的连接组件装配总成的剖视结构示意图。
25.本技术提供了一种连接组件,包括第一连接部和第二连接部,第一连接部包括可拆装连接的第一安装支架6和第一紧固件3,第二连接部包括可拆装连接的第二安装支架1和第二紧固件4;第二安装支架1具有与第一紧固件3压紧配合的限位支撑部,第二紧固件4具有与第一紧固件3卡装配合的卡装连接部,限位支撑部和卡装连接部的安装方向呈反向布置结构。第一连接部和第二连接部相连进行不同组件的连接,第二连接部由限位支撑部压紧到第一紧固件3上,第二紧固件4连接第二安装支架1的同时,由卡装连接部卡装连接到第一紧固件3上,通过将限位支撑部和卡装连接部呈基本反向的布置结构,使得第一紧固件3由第二安装支架1和第二紧固件4同时夹紧,进而实现了第一连接部和第二连接部的快速连接。
26.具体地,本技术提供的连接组件用于器械臂的臂件和直线轴结构的快速连接,第一安装支架6为直线轴连接架6,第二安装支架1用于连接臂件,适应臂件的结构,采用凹槽接口结构,对应地,第二安装支架1为柱状安装支架结构。
27.第一紧固件3与第二安装支架1配合,适应第二安装支架1的柱状安装支架结构,二者采用轴孔的配合结构,第一紧固件3上伸出连接凸台31,第二安装支架1内开设与连接凸台31插装配合的安装孔。
28.进一步地,将连接凸台31设为斜度凸台,斜度凸台为插装端向内倾斜的斜度凸台,对应地,安装孔为斜面安装孔;斜度凸台和斜面安装孔在安装时,斜面结构具有自压紧功能,利用连接凸台和第二安装之间之间的压紧配合围成限位支撑部。
29.利用第二安装支架1的柱状安装支架结构,在柱状安装支架的外圈设置连接螺纹,对应地,将第二紧固件4设置与柱状安装支架螺纹连接的锁紧套筒4结构。
30.锁紧套筒4与柱状安装支架螺纹旋紧过程中,第一紧固件3压紧于柱状安装支架的内部,在第一紧固件3上布置环形压紧部33,在锁紧套筒4的根部向内伸出有环形连接部41,将环形连接部41卡装于环形压紧部33上,则在锁紧套筒4旋紧过程中,利用连接螺纹和环形连接部41,将第一连接部和第二连接部连接为一体。
31.当然,第二紧固件与第二安装支架也可以采用卡爪结构,卡爪可由第二安装支架上伸出,对应第一紧固件上的环形压紧部制备为与卡爪配合的卡环或卡台。
32.在本案一具体实施例中,环形压紧部33上伸出有防呆凸台32,柱状安装支架上开设防呆凹槽11,防呆凸台32沿轴向落入防呆凹槽11内。柱状安装支架与锁紧套筒4采用螺纹结构,为避免二者旋紧过程中,拖动柱状安装支架的旋转,导致其内部走线的损伤,在环形压紧部41和柱状安装支架装入端分别设防呆台32和防呆凹槽11,由二者的周向限位,仅通过旋转锁紧套筒进行轴向压紧。
33.通过防呆结构,对于臂件和直线轴结构的连接,二者内部的线路在接线后,不会随锁紧套筒4的转动进行扭曲拉伸,保证了线路安全。同时,为满足臂件和直线轴结构接线要求,利用连接凸台3内部开设过线通道34,预留出对线路的容置空间,便于线路的盘线和藏线。
34.进一步地,在锁紧套筒4的外壁面上还布置有对柱状安装支架径向锁紧的紧固螺钉2。在锁紧套筒4与柱状安装支架安装到位后,通过紧固螺钉2对柱状安装支架进行径向压紧,实现二次定位,避免长期工况下锁紧套筒4的松动,保证设备安全性。
35.在本技术中,第一安装支架6和第一紧固件3之间布置有沿轴向连接二者的连接螺栓7,以及对第一紧固件3的安装位置进行预定位的定位销5。第一安装支架6和第一紧固件3为可拆卸结构,第二安装支架1和第二紧固件4为可拆卸结构,在进行臂件和直线轴结构连接时,接线完成后,将多余线路藏线在连接凸台3内的过线通道34,连接凸台3首先安装第一安装支架6,即直线轴安装支架上,此时锁紧套筒4同时由其环形连接部41安装在连接凸台3和直线轴连接支架之间,为保证连接凸台3在直线轴安装支架上的定位准确性,设置定位销5对二者进行预定位,后通过连接螺栓7将二者锁紧为一体。
36.然后进行柱状安装支架的装入,在柱状安装支架未与连接凸台3压紧时,通过旋转锁紧套筒4,并调节臂件和直线轴结构位置,使得防呆结构安装到位,后通过旋转锁紧套筒4,进行二者的锁紧连接。
37.基于上述实施例中提供的连接组件,本技术还提供了一种器械臂,具有臂件和安装器械盒的直线轴结构,该臂件和直线轴结构之间采用上述实施例中提供的连接组件进行连接。
38.由于该器械臂采用了上述实施例的连接组件,所以该器械臂由连接组件带来的有益效果请参考上述实施例。
39.基于该器械臂,本技术还提供了一种手术机器系统,其具有进行手术操作的器械臂系统,器械臂系统具有器械臂,该手术机器人上的器械臂为如上所述的器械臂。
40.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1