柔性粘胶压块装置的制作方法
1.本实用新型属于晶棒粘胶装置技术领域,本实用新型涉及柔性粘胶压块装置。
背景技术:
2.传统光伏自动化晶棒粘胶是先在晶棒上涂胶,上粘胶板及粘胶板压块,之后待胶水固化后再撤粘胶板压块,再在粘胶板上涂胶,再上晶棒及晶棒压块,待胶水固化后再撤下晶棒压块,之后入立体库。此种生产线生产节拍长,占用场地更大,且传统压块需要在晶棒侧边增加限位,这样面对多规格晶棒时很难自动完成上压块动作,柔性程度差。
技术实现要素:
3.本实用新型的目的是克服上述背景技术中的不足,提供柔性粘胶压块装置,本实用新型提供的柔性粘胶压块装置对比于传统光伏自动化晶棒粘胶线,实现单工位自动化晶棒晶托粘胶板上下的压块固定,相对比传统四工位上下压块粘胶线节省节拍,减小了生产线的占地面积。
4.本实用新型解决其技术问题所采用的技术方案是:一种柔性粘胶压块装置,包括机械手组件、压块;机械手组件与压块为活动连接;所述机械手组件包括机械手、桁架、若干个上接气组件;桁架的两端分别设置有机械手,若干个上接气组件设置在桁架上;所述压块包括压板、若干个下接气组件;压板两侧分别设有立板,若干个下接气组件设置在压板上,压板上还设有若干个吸盘;所述上接气组件和下接气组件设置个数保持一致且位置上下对应设置;上接气组件与下接气组件之间为活动连接,上接气组件向下移动压缩下接气组件的弹簧进而压缩密封o型圈形成密封连接。
5.所述下接气组件包括法兰;法兰中包括弹簧以及密封o型圈和密封法兰,密封o型圈压进密封法兰的燕尾槽中,弹簧通过法兰和密封法兰上下的限位柱进行限位固定。
6.相邻的两个下接气组件与相邻的两个吸盘连接;其中一个下接气组件与真空管道一端连接,真空管道的另一端与控制阀连接,另一个下接气组件与控制气管道一端相连接,控制气管道的另一端与控制阀连接,控制阀通过三通与两个吸盘分别连接。
7.进一步的,所述机械手与桁架之间设有导向组件;所述导向组件可选用但不限于滑块和导轨。
8.进一步的,所述上接气组件外接有真空发生器;
9.进一步的,每个机械手底部分别设有夹爪;
10.进一步的,上接气组件和下接气组件连接时,构成一组接气组件。
11.本实用新型与现有技术相比具有的有益效果是:
12.本实用新型提供的柔性粘胶压块装置,可以在晶托,晶棒,粘胶板三者涂完胶的时候同时对晶棒晶托粘胶板进行定位,其中压块上的吸盘会在与上方机械手组件相结合的时候产生负压,将吸盘与晶棒之间固定,且在夹爪与压块分离之后还会在一定时间内吸盘仍具有负压,进而将压块与晶托晶棒相对位置固定,且因为是吸盘进行晶棒及晶托压块之间
的相对位置固定,可以适应不同规格的晶棒,柔性程度更高,当晶棒静置达到足够时间胶水固化就可以将压块撤掉,完成晶棒粘胶过程。
附图说明
13.下面结合附图和实施例对本实用新型进一步说明:
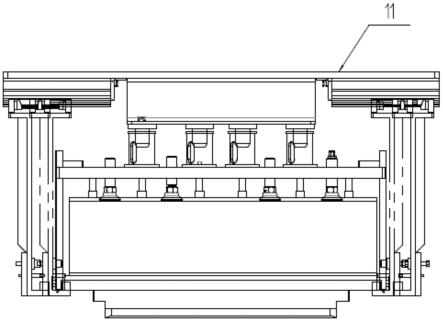
14.图1是本实用新型柔性粘胶压块装置放置工件后的主视图。
15.图2是机械手组件的结构示意图。
16.图3是机械手组件的侧视图。
17.图4是压块放置工件后的结构示意图。
18.图5是压块的结构示意图。
19.图6是压块的侧视图。
20.图7是工件粘结的主视图。具体为粘胶完成后的晶托晶棒粘胶板的示意图。
21.图8为未粘胶的晶托、晶棒、粘胶板静置放置位置示意图。
22.图9为图8的侧视图。
23.图10为图1的俯视图。
24.图11为接气组件连接结构示意图。
25.图12为断气自密封保压示意图。
26.图中1.机械手,2.立板,3.晶棒,4.粘胶板,5.晶托,6.上接气组件,7.下接气组件,8.吸盘,9.工件,10.桁架,11.夹爪,12.法兰,13.密封法兰,14.密封o型圈,15.弹簧,16.真空管道,17.控制气管道,18.控制阀,19.三通。
具体实施方式
27.以下结合说明书附图,对本实用新型进一步说明,但本实用新型并不局限于以下实施例。
28.实施例1
29.一种柔性粘胶压块装置,如图1-图12所示,包括机械手组件、压块;机械手组件与压块为活动连接;所述机械手组件包括机械手1、桁架、若干个上接气组件6;桁架的两端分别设置有机械手1,若干个上接气组件6设置在桁架上;所述压块包括压板、若干个下接气组件7;压板两侧分别设有立板2,若干个下接气组件7设置在压板上,压板上还设有若干个吸盘8;所述上接气组件6和下接气组件7设置个数保持一致且位置上下对应设置;上接气组件6与下接气组件7之间为活动连接,上接气组件6向下移动压缩下接气组件7的弹簧进而压缩密封o型圈14形成密封连接。
30.所述上接气组件6包括接气机构和按压机构,接气机构和按压机构上下连接设置且中间设有气体通道,接气机构用于外接真空发生器,按压机构包括压柱,压柱用于与下接气组件7连接。
31.所述下接气组件7包括外壳和法兰12;法兰12设置在外壳内部,法兰12中包括弹簧15以及密封o型圈14和密封法兰13,密封o型圈14压进密封法兰13的燕尾槽中,弹簧15通过法兰12和密封法兰13上下的限位柱进行限位固定。外壳为上下无盖的圆筒状。
32.压柱外圆周直径小于外壳内径。
33.相邻的两个下接气组件7与相邻的两个吸盘8连接;其中一个下接气组件7与真空管道16一端连接,真空管道16的另一端与控制阀18连接,另一个下接气组件7与控制气管道17一端相连接,控制气管道17的另一端与控制阀18连接,控制阀18通过三通16与两个吸盘8分别连接。
34.进一步的,所述机械手1与桁架之间设有导向组件;所述导向组件可选用但不限于滑块和导轨。
35.进一步的,所述上接气组件6外接有真空发生器;
36.进一步的,每个机械手1底部分别设有夹爪11;
37.进一步的,上接气组件6和下接气组件7连接时,构成一组接气组件。
38.装置动作流程:首先将晶托5晶棒3粘胶板4之间涂胶,完成后如图7所示的粘胶完成后的晶托晶棒粘胶板组成的工件9,之后在这三者定位之后用机械手将压块压上,接着夹爪落下上接气组件6与下接气组件7气体连通,夹爪11将工件9及压块固定夹持住,之后吸盘8与晶棒3之间形成真空,将晶棒3与压块固定,紧接着机械手组件将其从固定位放到静置位置,夹爪11松开,接气组件分开,控制阀18打开,开始进行保压工作,将其进行保压,待胶水固化静置完成后机械手1将压块取走,粘胶流程完成。
39.装置主要结构特征在于接气组件以及断气自密封保压;接气组件原理为机械手组件上的上接气组件6与下接气组件7中的密封法兰13相配合,之后接着向下运动,将弹簧15压缩,使上接气组件6与密封法兰13之间形成相互作用力,挤压密封o型圈14,使密封o型圈14变形,形成密封,之后机械手组件与压块中的气体就可以相互传导,将吸盘8形成真空状态。
40.断气自密封保压原理为:当接气组件都完成密封后首先控制气管道17充气使控制阀18将真空管道16与三通19之间控制通路,之后真空管道16开始抽真空,通过控制阀18与三通19使吸盘8行成真空,达到压块吸附固定晶棒3目的。机械手组件与压块要断开时,首先断开控制气管道17中气体,从而使控制阀18将真空管道16与三通19之间控制断路,使吸盘8中的负压在一段时间内保持在控制阀18与吸盘8中,以达到压块断气吸附固定晶棒3目的。
41.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1