一种管道检测机器人的制作方法
1.本技术涉及管道检测的领域,尤其是涉及一种管道检测机器人。
背景技术:
2.管道检测机器人用于对管道进行检测,确定管道是否存在裂纹等缺陷,并辅助确定留痕所在的位置,通过使用管道检测机器人,对于不便于人员直接进行检测的情况,使用检测机器人能够较为方便的实现检测,能够较为方便的确定管道的质量以及能否正常使用。
3.相关技术中的一种管道检测机器人包括安装基体、摄像模块、检测元件,其中,安装基体内开设有一空腔,形成一中空的箱体结构,用于对管道进行检测的检测元件包括各种传感器、里程计量机构,另外安装基体上还设置有用于带动安装基体移动的驱动机构,带动检测机器人沿管道移动;摄像模块固定在安装基体朝向前进方向的前侧,用于拍摄并记录管道内部的影像,便于后续的管道分析。
4.针对上述中的相关技术,发明人发现:在进行管道检测时,可能会有管道内存在杂物的情况,该种情况下,检测机器人在管道内沿管道前进,使得管道中的杂物抵接在摄像模块前侧,杂物被管道顶着向前,会导致杂物对摄像模块造成遮挡,影响正常的拍摄。
技术实现要素:
5.为了减少对正常的检测过程造成干扰,保证检测顺利进行,本技术提供一种管道检测机器人。
6.本技术提供的一种管道检测机器人采用如下的技术方案:
7.一种管道检测机器人,包括:
8.安装基体,用于安装各种用于对管道进行检测的元件;
9.摄像模块,设置在所述安装基体行进方向的前侧,用于拍摄、记录管道内部影响;
10.清理机构,设置在摄像模块前侧,包括活动连接在摄像模块上的清理板以及设置在摄像模块上的驱动件,所述驱动件用于带动所述清理板活动对摄像模块前侧区域进行清扫;
11.所述清理板上至少与所述摄像模块的通光路径对应位置处设置为透明材质。
12.通过采用上述技术方案,在检测的管道中存在杂物时,驱动件带动清理板移动将行进前方的杂物拨开,减少出现杂物抵接在摄像模块上对正常的拍摄过程造成遮挡的问题,保证管道检测过程的顺利进行,减少出现无法顺利对管道内进行拍摄、记录的问题。
13.可选的,所述清理板铰接在所述摄像模块其中一侧竖直边沿上。
14.通过采用上述技术方案,在拨开杂物时,驱动件带动清理板转动,将杂物拨向检测机器人的一侧,对检测机器人行进前方的杂物进行清理较为方便,且将杂物拨向检测机器人旁侧后,减少杂物对检测机器人正常的行进过程造成干扰的问题。
15.可选的,所述清理板背离所述摄像模块的侧面上设置有竖直的挡沿,且所述挡沿
位于清理板上远离与摄像模块铰接的一侧。
16.通过采用上述技术方案,清理板转动清理杂物的过程中,通过挡沿遮挡清理板前侧的杂物,能够减少出现杂物从清理板远离铰接轴的一侧掉落至清理板与摄像模块之间的现象,对杂物的清理效果更好。
17.可选的,所述挡沿与所述清理板滑动连接,且所述挡沿在水平方向内滑动;
18.所述检测机器人还包括用于带动所述挡沿滑动的滑移件。
19.通过采用上述技术方案,在使用一段时间后,通过滑移件带动挡沿在水平方向内滑动,对清理板表面进行清理,能够减少出现有部分杂物粘附在清理板上的问题,保证后续摄像过程中清理板保持洁净,减少造成拍摄影像模糊或是被遮挡的问题。
20.可选的,所述滑移件设置在所述摄像模块上;
21.所述滑移件的滑移部与所述挡沿之间设置有快速插接结构,所述清理板转动至与所述摄像模块相贴位置处时,所述挡沿通过所述快速插接结构与所述滑移件的滑移部连接。
22.通过采用上述技术方案,在清理板转动过程中,挡沿与滑移件分离,在清理板转动至与摄像模块相贴的位置处后,挡沿通过快速插接结构与滑移件连接,通过滑移件带动挡沿滑动,不需要将滑移件安装在清理板上,减小清理板的重量,不容易对正常的转动过程造成影响,能够及减少清理板的连接位置处出现损坏的问题,提升该检测机器人使用作业的稳定性。
23.可选的,所述快速插接结构包括固定在所述滑移件的滑移部上的连接块和固定在所述挡沿上的插接杆;
24.所述连接块上开设有插接槽,所述挡沿随所述清理板转动过程中带动所述插接杆插入至所述插接槽内。
25.通过采用上述技术方案,在清理板转动的过程中,插接杆随清理板直接插入至插接槽内,较为方便的实现挡沿与滑移件的快速插接,连接方便。
26.可选的,还包括安装套,所述清理板以及驱动件均设置在安装套上;
27.所述安装套套设在所述摄像模块上与所述摄像模块可拆卸固定。
28.通过采用上述技术方案,清理板以及驱动件设置在安装套上,并将安装套固定在摄像模块上,不需要直接在摄像模块上进行操作,将清理机构安装在摄像模块上的操作较为方便,且不容易对摄像模块本身造成破坏。
29.可选的,还包括控制器,所述驱动件以及所述摄像模块均与所述控制器信号连接,所述控制器用于在所述摄像模块检测到障碍物时控制所述驱动件带动所述清理板移动对障碍物进行清理。
30.通过采用上述技术方案,在检测机器人沿管道移动的过程中,通过摄像模块自动检测运动前方是否存在杂物,并将检测信息传输至控制器后通过控制器控制驱动件动作,不需要始终保持驱动件处于工作状态,降低能耗,同时,减少清理板持续转动影响正常的拍摄过程。
31.综上所述,本技术包括以下至少一种有益技术效果:
32.1.在检测的管道中存在杂物时,驱动件带动清理板移动将行进前方的杂物拨开,减少出现杂物抵接在摄像模块上对正常的拍摄过程造成遮挡的问题,保证管道检测过程的
顺利进行,减少出现无法顺利对管道内进行拍摄、记录的问题;
33.2.在检测机器人沿管道移动的过程中,通过摄像模块自动检测运动前方是否存在杂物,并将检测信息传输至控制器后通过控制器控制驱动件动作,不需要始终保持驱动件处于工作状态,降低能耗,同时,减少清理板持续转动影响正常的拍摄过程。
附图说明
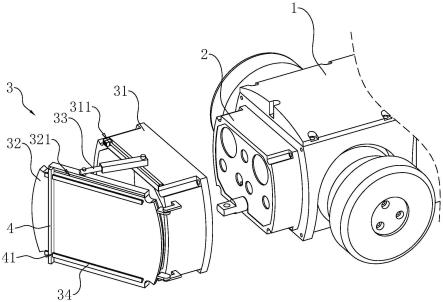
34.图1是本技术管道检测机器人的整体示意图;
35.图2是为了展示安装套的安装结构所做的示意图;
36.图3是图1中a部分的放大示意图;
37.图4是为了展示快速插接结构所做的示意图;
38.图5是图4中b部分的放大示意图。
39.附图标记说明:1、安装基体;2、摄像模块;3、清理机构;31、安装套;311、安装槽;32、清理板;321、条形孔;33、驱动件;34、滑轨;4、挡沿;41、滑槽;5、滑移件;6、快速插接结构;61、连接块;611、插接槽;62、插接杆。
具体实施方式
40.以下结合附图1-5对本技术作进一步详细说明。
41.本技术实施例公开一种管道检测机器人,参照图1和图2,该管道检测机器人包括安装基体1,安装基体1内形成有一空腔、用于安装各种用于对管道进行检测的元件;安装基体1朝向移动方向的前端设置有摄像模块2,通过摄像模块2拍摄、记录管道内部的影像,其中,摄像模块2前端为透明板材,在对摄像仪器起到保护作用的同时,减少造成遮挡;该检测机器人还包括设置在摄像模块2上的清理机构3。
42.参照图1和2,清理机构3包括安装套31,安装套31为一筒状结构,其套设在摄像模块2上,安装套31通过螺栓与摄像模块2可拆卸固定;安装套31上其中一竖向边沿处铰接一清理板32,清理板32为透明材质,其铰接轴竖直设置;安装套31上侧面上设置有一驱动件33,通过驱动件33带动清理板32转动,驱动件33为一电动推杆,电动推杆一端转动连接在安装套31上,另一端与清理板32转动连接,通过电动推杆伸缩带动清理板32转动,实现对摄像模块2前侧区域的清理;在另一实施例中,驱动件33通过驱动电机带动清理板32转动,驱动电机固定在安装套上,驱动电机与清理板之间连接有传动件,实现通过驱动电机带动清理板转动;当然,在其他实施例中,驱动件也可以使用气缸、液压缸等结构,只要能够实现带动清理板转动即可。
43.在使用该管道检测机器人对管道进行检测时,将其置入管道内,机器人沿管道行进,行进过程中通过安装基体1内的各种元件对管道进行检测,同时,摄像模块2拍摄、记录管道内部影响以供后续分析,在机器人行进前方存在杂物遮挡时,机器人行进至清理板32与杂物相抵的位置后,驱动件33带动清理板32转动将杂物拨向一侧,减少出现杂物遮挡摄像模块2的问题,不容易对检测机器人的正常使用造成影响。
44.另外,该检测机器人还包括与摄像模块2信号连接的控制器,同时,控制器与驱动件33之间也为信号连接,在机器人沿管道行进的过程中,摄像模块2持续拍摄管道内环境,在拍摄检测到存在杂物遮挡时向控制器输送信号,控制器在接收到对应的信号后控制驱动
件33动作带动清理板32转动,将遮挡的杂物向一侧拨开,减少对正常的行进、拍摄过程造成影响,能够根据检测实地状况判断是否需要进行清理,提升了使用的便利性,不需要驱动件33持续工作带动清理板32转动,减少了清理板32转动过程中对拍摄过程造成影响的现象。
45.参照图2和图3,该检测机器人还包括滑动连接在清理板32上的挡沿4,挡沿4竖直设置,清理板32上、下侧边沿处水平固定有两根滑轨34,滑轨34截面呈t形,挡沿4上开设有与滑轨34适配的滑槽41,使得挡沿4在滑轨34的长度方向上滑动;另外,安装套31上设置有用于带动挡沿4滑动的滑移件5,本技术实施例中的滑移件5为一无杆气缸。
46.具体的,参照图4和图5,安装套31上与无杆气缸对应位置处开设有一安装槽311,无杆气缸固定在安装槽311内;无杆气缸的滑移部与挡沿4之间设置有用于连接二者的快速插接结构6,该快速插接结构6包括固定在无杆气缸的滑移部上的连接块61和固定在挡沿4上的插接杆62;连接块61上开设有供插接杆62插入的插接槽611,清理板32上开设有供插接杆62穿过并容纳插接杆62滑动的条形孔321,插接杆62从条形孔321内穿过插入至插接槽611中,实现挡沿4与无杆气缸的滑移部的连接,以通过无杆气缸带动挡沿4滑动;插接槽611的形状与插接杆62端部转动经过的路径适配,挡沿4随清理板32转动过程中带动插接杆62插入至插接槽611内,后续无杆气缸带动连接块61滑动,进而带动挡沿4滑动。
47.在对检测机器人行进前方的杂物进行清理时,控制器控制驱动件33动作带动清理板32转动将检测机器人前方的杂物拨开至一侧,在清理板32转动一定角度后,通过设置的挡沿4,能够对杂物起到阻挡作用,减少出现在清理板32转动过程中杂物从清理板32远离铰接轴的一侧滑落的问题,在对检测机器人前侧的杂物进行进行清理的效果更好。
48.在清理板32完成对前侧杂物的清理后,驱动件33带动清理板32转动至与摄像模块2相贴的状态,同时,插接杆62插入至插接槽611内,在经过多次清理作业后,控制滑移件5带动挡沿4滑动,通过挡沿4对清理板32的表面进行清理,能够减少出现清理板32上粘附有杂物而对正常的摄像过程造成干扰的问题。
49.对于设置清理板32进行杂物清理的功能,在实际使用的过程中,可以在检测机器人持续前进的状态下进行清理,当然,也可在使用清理板32进行杂物清理时控制检测机器人停止前进,能够减少清理杂物的过程对拍摄过程造成干扰。
50.在实际使用过程中,为了提升挡沿4对清理板32表面的清理效果,可以在挡沿4朝向清理板32的一侧固定橡胶垫、软布等材质,保持与清理板32表面贴紧,对清理板32表面清理的效果更好。
51.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1