一种高精度视觉定位装置的制作方法
1.本实用新型属于视觉定位技术领域,尤其涉及一种高精度视觉定位装置。
背景技术:
2.目前常规的视觉定位装置主要包括上下两套固定设置的摄像单元及调整纠偏机构;上下两套摄像单元的布设导致装置较为复杂;且在装配、调校与标定上下两套摄像单元时还存在操作过程复杂、系统误差较大的问题;而目前的调整纠偏机构为xyz三轴串联机构,存在调整时间长、对产品初始放置位置要求较高、更无法解决待调整纠偏产品与待组装产品之间的平行度问题,严重影响了产品定位精度。另外,现有视觉定位装置的抗干扰能力差、其定位精度和稳定性容易受到外部环境振动的影响。再者,还有一部分视觉定位装置上集成有工艺单元,但不合理的布局导致动作的工艺单元会对定位精度和稳定性产生影响。
技术实现要素:
3.旨在克服上述现有技术中存在的至少之一处不足,本实用新型提供了一种高精度视觉定位装置,其结构简单,便于装配、调试与标定,对产品初始放置位置要求较低,且可保证产品的定位精度和稳定性。
4.为解决上述现有技术中存在的问题,本实用新型实施例提供了一种高精度视觉定位装置,包括隔振架和位于所述隔振架上方的安装板,所述隔振架的顶面与所述安装板之间设有多个第一支撑件;
5.所述隔振架的顶面上设有用于承托并固定待调整产品的六轴调整平台,所述安装板上设有xyz调节单元,所述xyz调节单元上设有摄像单元;所述安装板上设有用于供所述摄像单元伸出的避让窗口。
6.进一步,所述隔振架包括基板和位于所述基板下方的架台,所述架台和所述基板之间夹设有隔振单元。
7.进一步,所述隔振单元包括多个空气弹簧。
8.进一步,所述架台朝向所述基板的一侧设有多个限位柱和缓冲器。
9.进一步,所述xyz调节单元包括x向直线运动机构、x向滑轨滑块结构、y向直线运动机构和z向直线运动机构;
10.所述x向直线运动机构和所述x向滑轨滑块结构沿y向间隔设置于所述安装板上;所述y向直线运动机构的固定部一端与所述x向直线运动机构的驱动部连接,另一端与所述x向滑轨滑块结构的滑动部连接;所述z向直线运动机构设置于所述y向直线运动机构的驱动部上。
11.进一步,所述第一支撑件设置有四个;所述安装板具有四个呈矩形排布的边角部,每个所述边角部与所述隔振架之间均设有一个所述第一支撑件。
12.进一步,所述安装板背离所述隔振架的一侧设有四个第二支撑件,所述第二支撑件与所述第一支撑件的位置一一对应。
13.进一步,所述高精度视觉定位装置还包括工艺单元;所述工艺单元架设置在所述第二支撑件的顶端。
14.进一步,所述工艺单元包括y向移动机构、y向移动导向机构、连接座和产品保压机构;
15.所述连接座的一端与所述y向移动机构的动力部连接,另一端与所述y向移动导向机构的滑动部连接;所述产品保压机构设置于所述连接座上。
16.进一步,所述产品保压机构包括设置于所述连接座顶部的z向驱动件和位于所述连接座底部且与所述z向驱动件连接的压板;所述压板与所述连接座之间设有导向结构。
17.由于采用了上述技术方案,取得的有益效果如下:
18.本实用新型中的高精度视觉定位装置,包括隔振架和位于隔振架上方的安装板,隔振架的顶面与安装板之间设有多个第一支撑件;隔振架的顶面上设有用于承托并固定待调整产品的六轴调整平台,安装板上设有xyz调节单元, xyz调节单元上设有摄像单元;安装板上设有用于供摄像单元伸出的避让窗口。
19.借助xyz调节单元带动摄像单元移动,就能获取一个产品上下左右不同位置的mark,或上、下两个产品上的mark;简化了结构,且可规避上下两套摄像单元光轴调校、标定复杂困难的问题。另外,利用六轴调整平台可以任意调整其上待调整产品的位置和角度,对待调整产品的初始放置位置要求较低,可确保其与由上料设备搬运到位的待组装产品之间的平行度,提高了定位精度。再者,隔振架可以将外部振动吸收,使摄像单元和六轴调整平台不受外部环境振动影响,提高了稳定性。
20.综上所述,本实用新型结构简单,便于装配、调试与标定,对产品初始放置位置要求低,且可保证产品的定位精度和稳定性。
附图说明
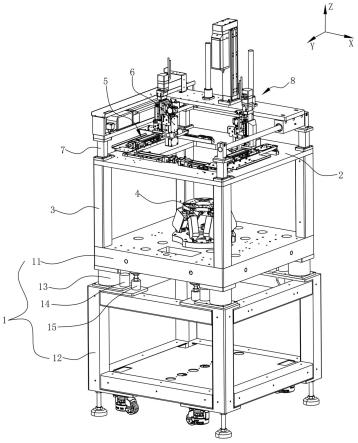
21.图1是本实用新型高精度视觉定位装置的结构示意图;
22.图2是图1中架台的结构示意图;
23.图3是图1中基板、六轴调整平台和第一支撑件的结构示意图;
24.图4是图1中安装板、xyz调节单元和摄像单元的结构示意图;
25.图5是图1中第二支撑件和工艺单元的结构示意图;
26.图中:1-隔振架,11-基板,12-架台,13-空气弹簧,14-限位柱,15-缓冲器,2-安装板,21-避让窗口,3-第一支撑件,4-六轴调整平台,5-xyz调节单元,51-x向直线运动机构,52-x向滑轨滑块结构,53-y向直线运动机构,54-z向直线运动机构,6-摄像单元,7-第二支撑件,8-工艺单元,81-y向移动机构,82-y向移动导向机构,83-连接座,84-产品保压机构,841-z向驱动件,842-压板,843-导向结构,8431-导向轴,8432-轴套。
具体实施方式
27.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
28.由图1至图5共同所示,本实施例公开了一种高精度视觉定位装置;具体包括可吸
收外部振动的隔振架1和位于隔振架1上方的安装板2,隔振架1的顶面与安装板2之间设有多个第一支撑件3(图中所示为支撑柱结构);隔振架1的顶面上设有用于承托并固定待调整产品的六轴调整平台4,安装板2上设有xyz调节单元5,xyz调节单元5上设有摄像单元6;安装板2上设有用于供摄像单元6伸出的避让窗口21。
29.其中,隔振架1包括基板11和位于基板11下方的架台12,架台12和基板11之间夹设有隔振单元。本实施例中,隔振单元包括多个空气弹簧13;还有一些实施例中,隔振单元包括多个橡胶隔振器和螺旋弹簧等。
30.架台12与地面直接接触,环境振动经由架台12传递至隔振单元,隔振单元中的空气弹簧13将外部振动吸收,使得xyz调节单元5、摄像单元6以及六轴调整平台4不受环境振动的影响,提高了稳定性。
31.为了防止空气弹簧13失效时,基板11与架台12硬性碰撞,对摄像单元6和六轴调整平台4造成损害,本实施例对上述结构作了进一步优化,在架台12朝向基板11的一侧设有多个限位柱14和缓冲器15。
32.本实施例中,六轴调整平台4包括六轴调整部和承托台,承托台上设有用于与气源连通、对承托的待调整产品进行吸附固定的气孔。利用六轴调整平台4可以任意调整其上待调整产品的位置和角度,对待调整产品的初始放置位置要求较低,可确保其与由上料设备搬运到位的待组装产品之间的平行度,提高了定位精度。
33.本实施例中,xyz调节单元5包括x向直线运动机构51、x向滑轨滑块结构52、y向直线运动机构53和z向直线运动机构54;x向直线运动机构51和x向滑轨滑块结构52沿y向间隔设置于安装板2上;y向直线运动机构53的固定部一端与x向直线运动机构51的驱动部连接,另一端与x向滑轨滑块结构52的滑动部连接;z向直线运动机构54设置于y向直线运动机构53的驱动部上。
34.其中,x向直线运动机构51、y向直线运动机构53、z向直线运动机构54可选配气缸、电缸、丝杠螺母运动机构等任何能实现直线往复运动的机构;本实施例优选占用空间小的丝杠螺母运动机构。x向滑轨滑块结构52包括x向延伸的滑轨和滑动安装在滑轨上作为滑动部的滑块。
35.借助x向直线运动机构51、y向直线运动机构53、z向直线运动机构54带动摄像单元6移动,就能精确获取一个产品上下左右不同位置的mark,或上、下两个产品上的mark;简化了结构,且可规避上下两套摄像单元光轴调校、标定复杂困难的问题。
36.本实施例的高精度视觉定位装置上还集成有工艺单元8,为了避免因不合理布局、导致工艺单元8动作时对定位精度和稳定性产生影响。本实施例对上述结构作了进一步优化;第一支撑件3优选设置有四个;安装板2至少具有四个呈矩形排布的边角部,每个边角部与基板11之间均设有一个第一支撑件3。
[0037] 安装板2背离基板11的一侧设有四个第二支撑件7,第二支撑件7与第一支撑件3的位置一一对应。工艺单元8架设在第二支撑件7的顶端。用于架设工艺单元8的第二支撑件7与安装板2的连接点位于4个边角处,而安装板2 的边角处与第一支撑件3连接,因此工艺单元8相当于直接支撑固定于第一支撑件3上,工艺单元8在动作时产生的振动、冲击等基本上不会传递到位于安装板2中部的摄像单元6上,摄像单元6与工艺单元8的支撑近似隔离,因此可提高摄像单元6的抗干扰能力,进一步提高定位精度和稳定性。
[0038]
本实施例中,工艺单元8包括y向移动机构81、y向移动导向机构82、连接座83和产品保压机构84;连接座83的一端与y向移动机构81的动力部连接,另一端与y向移动导向机构82的滑动部连接;产品保压机构84设置于连接座83上。其中,y向移动机构81包括框架和安装在框架上的y向移动件。y向移动件可选配为气缸、电缸、丝杠螺母运动机构等任何能实现直线往复运动的部件。y向移动导向机构82包括导向轴和滑动安装在导向轴上的滑动座。
[0039]
本实施例中,产品保压机构84包括设置于连接座83顶部的z向驱动件841和位于连接座83底部且与z向驱动件841连接的压板842;压板842与连接座83之间设有导向结构843。其中,导向结构843包括固定在连接座83上的轴套8432(或者直线轴承)和一端与压板842连接、另一端与轴套8432滑动配合的导向轴8431。
[0040]
下面基于特定的应用场合,对上述高精度视觉定位装置的工作原理进行简要阐述:
[0041]
待调整产品被放置在六轴调整平台4,六轴调整平台4对其进行承托固定;上料设备将待组装产品搬运到组装位,即固定于待调整产品的上方,等待组装;随后x向直线运动机构51 、y向直线运动机构53 、z向直线运动机构54协调动作,带动摄像单元6移动到预设位置并获取待调整产品和待组装产品上的mark;控制系统基于摄像单元6获取的mark信息控制六轴调整平台4动作,对待调整产品的位置和角度进行调整,确保待调整产品和待组装产品平行且对准,随后六轴调整平台4带动待调整产品向待组装产品方向运动,完成组装;组装后,x向直线运动机构51 、y向直线运动机构53 、z向直线运动机构54协调动作,带动摄像单元6移动到避让位,工艺单元8中的y向移动机构81带动产品保压机构84运动到组装位后,产品保压机构84中的z向驱动件841带动压板842下降,完成组装的产品进行保压。
[0042]
借助xyz调节单元5带动摄像单元6移动,就能获取一个产品上下左右不同位置的mark,或上、下两个产品上的mark;简化了结构,且可规避上下两套摄像单元光轴调校、标定复杂困难的问题。另外,利用六轴调整平台4可以任意调整其上待调整产品的位置和角度,对待调整产品的初始放置位置要求较低,可确保其与由上料设备搬运到位的待组装产品之间的平行度,提高了定位精度。再者,隔振架1可以将外部振动吸收,使摄像单元6和六轴调整平台4等装置不受外部环境振动影响,提高了稳定性。工艺单元8的合理布局,有效避免了其动作时对定位精度和稳定性的影响。
[0043]
综上所述,本实用新型结构简单,便于装配、调试与标定,对产品初始放置位置要求低,且可保证产品的定位精度和稳定性。
[0044]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1