一种轮式管道检测机器人的制作方法
本技术涉及管道监测,特别是涉及一种轮式管道检测机器人。
背景技术:
1、在城镇化发展和城市建设不断加快的情况下,为满足人们日益增长的生产生活需求,我国城市管道已经越来越多,地下管网系统正持续扩大。本来,管道维护检修就是高难复杂工作,管道内环境恶劣且具备危险性,眼下作业量又攀升,无疑给工人带来压力。而机器人的应用,能够很好解决上述痛点,在满足管道日常运维的同时,将人类从脏累差的工作中解救出来。通过替代工人进入管道,机器人一方面能够高效率、高覆盖、高精准的进行作业;另一方面,也能够很好抵御各种环境威胁,有效减少作业的安全风险与人工成本。
2、管道检测机器人常规检测方法是通过检查井垂直下入管道内,在管道中爬行的过程中,利用所安装的摄像头进行实时录像。由于井内环境恶劣,会使管道检测机器人在上、下检查井以及爬行过程中极易发生碰撞;同时传统的管道检测机器人还存在气密性较差,整体稳定性与易用性较差等问题;并且由于传统的管道检测机器人在结构设计方面存多为轮廓方正或者有突出结构,容易造成结构过度磨损并存在通过性较差的问题。
3、为了解决上述问题,我们提出了一种轮式管道检测机器人。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种轮式管道检测机器人,相较现有技术在装置气体密封性、运行稳定性、管道通过性以及使用寿命等方面均有较为明显的提升。
2、为实现上述目的,本实用新型提供如下技术方案:
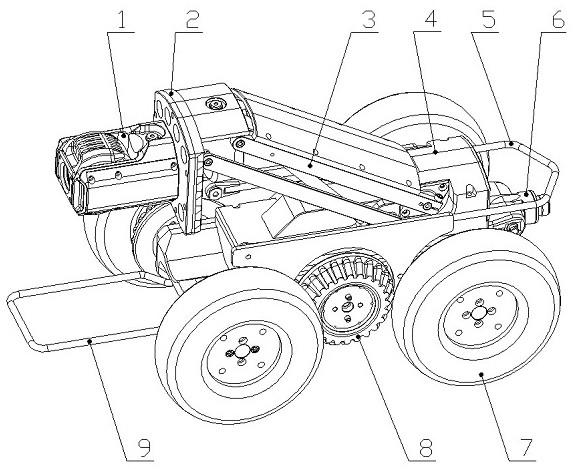
3、一种轮式管道检测机器人,包括旋转镜头、主光源灯座、抬升装置、管道检测机器人腔体、下井吊环组件、尾部组件、镜头防撞环组件,
4、所述旋转镜头安装于所述主光源灯座上,所述旋转镜头由水平旋转机构、镜头框体、垂直旋转机构、第一圆形连接器组成;所述水平旋转机构的从动齿轮安装于所述第一圆形连接器上,所述垂直旋转机构的从动齿轮安装于所述镜头框体上,带动垂直旋转机构和镜头框体旋转,所述垂直旋转机构和所述水平旋转机构的电机分别固定在同一结构件上;
5、所述主光源灯座通过所述抬升装置安装于所述管道检测机器人腔体上,
6、所述抬升装置由抬升主动臂、抬升涡轮轴结构、抬升传感器装置、蜗杆、抬升电机座抬升电机、抬升从动臂、气弹簧组成,所述抬升电机座安装于所述管道检测机器人腔体上,所述抬升电机安装于所述抬升电机座上,所述蜗杆安装于所述抬升电机输出轴上,所述抬升从动臂一端安装于所述抬升电机座上,另一端安装于所述主光源灯座上;所述气弹簧的一端安装于所述管道检测机器人腔体上,另一端安装于所述抬升主动臂上;所述抬升传感器装置固定安装于所述管道检测机器人腔体上,所述抬升传感器装置主体为旋转电位器传感器,通过安装有齿轮与抬升涡轮轴结构联动;
7、所述管道检测机器人腔体底部呈凹形设计,所述管道检测机器人腔体两侧分别设置有3组轮轴,小号轮安装于所述轮轴上,大号轮叠加安装于所述小号轮上,靠近所述管道检测机器人腔体尾部的2组轮轴贯穿安装于所述管道检测机器人腔体内部并在所述轮轴内外侧分别设置有轮轴油封,所述轮轴的传动箱内部灌满润滑脂;
8、所述管道检测机器人腔体前端设置有所述镜头防撞环组件,
9、所述管道检测机器人腔体上部设置有所述下井吊环组件,
10、所述管道检测机器人腔体后端设置有所述尾部组件,所述尾部组件由电缆线、尾部过线侧座、尾部转轴、第二圆形连接器、尾部油封、轴承、气门芯、尾部气门芯座组成,所述尾部过线侧座固定安装于所述管道检测机器人腔体上,所述尾部转轴的一端铰接安装于所述尾部过线侧座上,所述尾部气门芯座铰接安装于所述尾部转轴的另一端并固定于所述管道检测机器人腔体上,尾部气门芯座上安装有所述气门芯,所述第二圆形连接器焊接有所述电缆线,所述电缆线松弛的穿入所述尾部转轴和尾部过线侧座并延伸到所述管道检测机器人腔体内部,所述第二圆形连接器固定安装于所述尾部转轴上,所述尾部转轴两端分别安装有所述尾部油封和轴承。
11、本实用新型轮式管道检测机器人结构呈圆柱形,可实现管道检测机器人在检测管道中为相切有较大的上部间隙、较高的离地间隙,在发生翻滚和碰撞后与管道有较大的接触面积,有更优的通过性和耐碰撞性。
12、优选地,所述下井吊环组件由下井吊环安装板、下井吊环组成,所述下井吊环安装板固定安装于所述管道检测机器人腔体上,下井吊环铰接安装于所述下井吊环安装板上。
13、优选地,所述尾部过线侧座和尾部转轴为满足电缆穿入的中空结构,所述尾部转轴和尾部过线侧座上设置有装配有密封圈的密封槽;
14、优选地,所述抬升涡轮轴结构由涡轮轴轴承座、涡轮螺母、涡轮碟簧、涡轮和涡轮轴组成,所述涡轮安装于所述涡轮轴上,并由所述涡轮碟簧通过涡轮螺母压紧。
15、优选地,所述主光源灯座由主光源灯座前盖、主光源透镜、主光源灯板、主光源灯座后板组成,所述主光源透镜安装于所述主光源灯座前盖上,所述主光源灯板安装于所述主光源灯座后板上,所述主光源灯座前盖安装于所述主光源灯座后板上,所述主光源透镜的材料选用透明亚力克玻璃。
16、优选地,所述垂直旋转机构包括垂直旋转机构电机、垂直旋转机构碟簧、垂直旋转机构螺母、垂直旋转从动齿轮、垂直旋转惰轮、垂直旋转主动齿轮,所述垂直旋转主动齿轮安装于所述垂直旋转机构电机上,所述垂直旋转机构螺母压紧所述垂直旋转机构碟簧和垂直旋转从动齿轮固定于所述镜头框体上,所述垂直旋转主动齿轮与所述垂直旋转惰轮啮合,所述垂直旋转惰轮与所述垂直旋转从动齿轮啮合;所述水平旋转机构包括水平旋转轴、水平旋转从动齿轮、水平旋转机构碟簧、水平旋转机构螺母、水平旋转机构电机、水平旋转主动齿轮、水平旋转惰轮,所述水平旋转主动齿轮安装于所述水平旋转机构电机上,所述水平旋转机构螺母压紧所述水平旋转机构碟簧和水平旋转主动齿轮固定在所述水平旋转轴上,所述水平旋转轴安装在所述第一圆形连接器上,所述水平旋转主动齿轮与所述水平旋转惰轮啮合,所述水平旋转惰轮与所述水平旋转从动齿轮啮合。
17、与现有技术相比,本实用新型能达到的有益效果是:
18、1、通过对管道检测机器人结构采用圆柱形设计,可实现管道检测机器人在发生碰撞后与管道有较大的接触面,相比较管道检测机器人较为常规的方正型设计,具有更有的通过性和耐碰撞性。
19、 2、通过对管道检测机器人腔体轮轴内外侧安装油封,并再轮轴传动箱灌满润滑脂进行双重密封,提升管道检测机器人腔体内部气密性。
20、 3、通过采用大号轮叠加安装在小号轮上的设计形式,避免了传统管道检测机器人更换滚轮需要先行拆除原滚轮的步骤,操作更为便捷。
21、 4、通过对下井吊环组件设计有两块下井吊环安装板,可实现对下井吊环有保护同时起到导向作用,有效降低下井吊环的损坏概率。
22、 5、通过在管道检测机器人腔体后端设置尾部组件,使尾部电缆线在尾部组件内部进入管道检测机器人腔体,减少尾部电缆线外露磨损的可能;同时在尾部组件加装气门芯,可通过气门芯充气,使管道检测机器人腔体内部与外部产生压差,当管道检测机器人浸入水体时,会产生向管道检测机器人腔体内的压差,由于充入气体的压差高于水体的压差,将使管道检测机器人有更好的气密性。
23、 6、通过抬升涡轮轴结构实现对抬升装置设置有力矩限制功能,进一步保护抬升装置在磕碰后不受损坏。
24、 7、通过对主光源灯座透镜采用实心亚克力玻璃材质,可有效降低主光源灯座在受磕碰后破裂的几率。
25、 8、通过旋转镜头的垂直、水平旋转机构均设置有力矩限制装置,保护旋转镜头在磕碰后不受损坏。
26、 9、本管道检测机器人结构简单、操作便捷,具有不同管道环境良好的适用性,同时相较现有技术在装置气体密封性、运行稳定性、管道通过性以及使用寿命等方面均有较为明显的提升。
- 还没有人留言评论。精彩留言会获得点赞!