一种地下管廊视觉巡检机器人的制作方法
1.本实用新型涉及机器人领域,具体涉及一种地下管廊视觉巡检机器人。
背景技术:
2.现有技术中有一种轨道式的管廊巡检机器人,为了避免在爬坡和下坡时发生打滑或溜车现象,通过在靠近轨道的一侧上设置齿轮并在轨道上设置与之啮合的齿条,进而利用齿轮传动增强机器人爬坡和下坡时的行进的稳定性和可靠性。
3.然而,以齿轮啮合的方式达到该效果,则要求轨道相应地设计成齿条的形式,无疑会大大增加轨道的加工成本;同时齿轮啮合的方式对整体有较高的安装精度要求,若本身的安装精度不够,或长时间使用后出现磨损,极容易导致机器人在移动时出现震动以致引发噪声影响作业。
4.因此,现有技术有待改进和发展。
技术实现要素:
5.本技术的目的在于提供一种地下管廊视觉巡检机器人,能够有效降低轨道的加工成本和安装精度要求,有利于避免移动时引发噪声。
6.本技术的技术方案如下:
7.一种地下管廊视觉巡检机器人,能够沿地下管廊中的轨道行驶,包括:
8.机器人主体,所述机器人主体的上部安装有两个对称设置的履带连接架,每个所述履带连接架上设置有一个橡胶履带,所述轨道位于两个所述橡胶履带之间,两个所述橡胶履带分别压于所述轨道相对的两侧;
9.第一驱动电机,所述第一驱动电机上连接有丝杆,所述丝杆与两个所述履带连接架螺纹传动连接;所述第一驱动电机用于驱动所述丝杆旋转以使两个所述履带连接架带动两个所述橡胶履带沿所述丝杆的长度方向相互靠近或相互远离;
10.第二驱动电机,所述第二驱动电机用于驱动所述橡胶履带运动。
11.本技术提供的地下管廊视觉巡检机器人,设置橡胶履带增加机器人与轨道之间的摩擦力,同时辅助驱动机器人,替代了现有的齿轮啮合方式,降低了轨道的加工成本和整体的安装难度。
12.进一步的,所述机器人主体的上部还安装有两组滑轮组,所述橡胶履带的前后两侧均设置有一组所述滑轮组,且所述滑轮组包括两个滑轮,两个所述滑轮均滚动设置在所述轨道上;
13.所述地下管廊视觉巡检机器人还包括多个第三驱动电机,每个所述第三驱动电机均用于驱动对应的一个所述滑轮转动。
14.进一步的,所述机器人主体上安装有视觉模块。
15.通过设置视觉模块使得机器人能够自动获取地下管廊中的图像,有利于帮助巡检人员发现隐患。
16.进一步的,所述机器人主体上安装有实时数据传输模块。
17.确保机器人在地下管廊中能够将所获取的图像、环境参数等信息实时回传到地面工作站。
18.进一步的,所述视觉模块包括摄像头,所述摄像头的前端设置有防护罩。
19.进一步的,所述防护罩的前端还设置有洗刷罩,所述洗刷罩转动设置在所述机器人主体上;所述洗刷罩通过转动能够完全覆盖所述防护罩。
20.进一步的,所述机器人主体中安装有净水箱、污水箱、第一水泵和第二水泵;
21.所述洗刷罩包括位于内部的空腔、位于上侧的进水口、位于下侧的出水口以及多个雾化喷头,多个所述雾化喷头安装在所述洗刷罩朝向所述防护罩的侧面上,并与所述空腔连通;所述进水口与所述空腔连通,且所述进水口与所述净水箱连通;所述出水口贯通所述洗刷罩朝向所述防护罩的侧面,且与所述污水箱连通;
22.所述第一水泵安装在所述净水箱和所述进水口之间,用于将位于所述净水箱中的洁净水泵入所述空腔中;
23.所述第二水泵安装在所述污水箱和所述出水口之间,用于将位于所述洗刷罩朝向所述防护罩的侧面上的污水泵入所述污水箱中。
24.能够自动清洁防护罩表面,有利于确保机器人获取真实且清晰的图像。
25.进一步的,所述洗刷罩还包括环形的刮片,所述刮片与所述防护罩贴合。
26.进一步的,所述出水口的上端设置有倒角弧面。
27.进一步的,所述机器人主体设置有两个凹槽,所述净水箱和所述污水箱均以可拆卸的连接方式分别安装在对应的一个所述凹槽中。
28.本实用新型的有益效果:本技术的地下管廊视觉巡检机器人,通过在轨道两侧设置能够夹持在轨道上的橡胶履带以增强与轨道之间的摩擦力,并且橡胶履带能够受驱动控制进行运动,辅助带动机器人进行爬坡和下坡,代替现有的齿轮啮合方式,确保机器人在爬坡和下坡时能够拥有相同的稳定性和可靠性的同时降低轨道加工成本和整体的安装难度,避免机器人作业时引发噪声以致妨碍信息收集。
附图说明
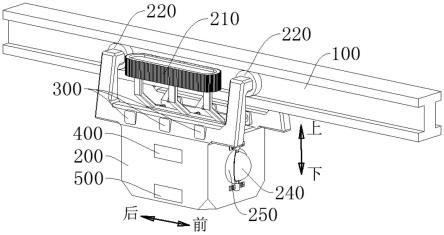
29.图1为本技术实施例提供的一种地下管廊视觉巡检机器人的结构示意图。
30.图2为本技术实施例提供的一种地下管廊视觉巡检机器人的正视图。
31.图3为本技术实施例提供的一种地下管廊视觉巡检机器人的局部剖视图。
32.图4为图3中标号为a的局部结构示意图。
33.图5为本技术实施例提供的一种地下管廊视觉巡检机器人的局部剖视爆炸图。
34.图6为图5中标号为b的局部结构示意图。
35.图7为本技术实施例中洗刷罩的半剖图。
36.标号说明:
37.100、轨道;200、机器人主体;210、橡胶履带;220、滑轮;230、摄像头;240、防护罩;250、洗刷罩;251、空腔;252、进水口;253、出水口;254、雾化喷头;255、刮片;300、第一驱动电机;310、丝杆;400、净水箱;410、第一水泵;500、污水箱;510、第二水泵。
具体实施方式
38.下面详细描述本实用新型的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
39.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
40.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
41.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
42.下文的公开提供了许多不同的实施方式或例子用来实现本实用新型的不同结构。为了简化本实用新型的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本实用新型。此外,本实用新型可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本实用新型提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
43.需要说明的是,下文所述的“前”、“后”、“上”和“下”以附图1中的标注的箭头方向作为参考。
44.在某些实施例中,参考附图1和附图2,一种地下管廊视觉巡检机器人,能够沿地下管廊中的轨道100行驶,包括:
45.机器人主体200,机器人主体200的上部安装有两个对称设置的履带连接架,每个履带连接架上设置有一个橡胶履带210,轨道100位于两个橡胶履带210之间,两个橡胶履带210分别压于轨道100相对的两侧;
46.第一驱动电机300,第一驱动电机300上连接有丝杆310,丝杆310与两个履带连接
架螺纹传动连接;第一驱动电机300用于驱动丝杆310旋转以使两个履带连接架带动两个橡胶履带210沿丝杆310的长度方向相互靠近或相互远离;
47.第二驱动电机,第二驱动电机用于驱动橡胶履带210运动。
48.本实施例中,橡胶履带210具体是在普通的履带外侧面包覆一层橡胶层,橡胶具有一定的形变能力,在外力作用下能够较好地贴合在轨道上,同时橡胶本身的材质便于用户在其表面设置纹理,以增加表面粗糙度,从而大大增加机器人与轨道100之间的摩擦力,因此能够有效确保机器人在爬坡或下坡时的稳定性和可靠性;此外,橡胶履带210只需要贴合在轨道100上即可,并不需要对轨道100进行重新设计和加工,有利于减少轨道的加工成本;进一步的,橡胶履带210在第二驱动电机的驱动作用下也能够辅助机器人行驶,避免机器人出现爬坡不够动力或下坡速度过快等情况。
49.实际使用时,当机器人行驶在轨道100的平直路段时,第一驱动电机300控制两个橡胶履带210相互远离,避免橡胶履带210压于轨道100的两侧,进而避免橡胶履带210造成阻力影响机器人的高速运动,有利于机器人在地下管廊中实现快速巡检,在出现突发情况时,也能够快速到达事发地;当机器人进行爬坡或下坡时,第一驱动电机则控制两个橡胶履带210相互靠近,使得橡胶履带210压于轨道100的两侧,进而使机器人稳定安全地完成爬坡或下坡。
50.在某些实施例中,参考附图1和附图2,机器人主体200的上部还安装有两组滑轮组,橡胶履带210的前后两侧均设置有一组滑轮组,且滑轮组包括两个滑轮220,两个滑轮220均滚动设置在轨道100上;
51.地下管廊视觉巡检机器人还包括多个第三驱动电机,每个第三驱动电机均用于驱动对应的一个滑轮220转动。
52.本实施例中,滑轮220由轨道100承托,从而将机器人吊装在轨道100下方;在实际应用时,滑轮220作为驱动轮驱动机器人沿轨道100行驶,通过第三驱动电机控制机器人行驶时的速度,只有在进行爬坡或下坡时,橡胶履带210才会配合滑轮220共同驱动机器人。
53.在某些实施例中,机器人主体200上安装有视觉模块。
54.本实施例中,通过设置视觉模块使得机器人能够自动获取地下管廊中的图像,例如管道的渗水图像,有利于帮助巡检人员发现隐患。
55.在某些实施例中,机器人主体200上安装有气体探测器和温湿度传感器,能够自动获取地下管廊的环境参数,例如氧气浓度、管廊温度和管廊湿度等,在发生突发情况后,有助于协助制定救援方案。
56.在某些实施例中,机器人主体200上安装有实时数据传输模块。该实时数据传输模块可以但不限于是4g通信模块、5g通信模块、wifi通信模块等。例如,实时数据传输模块为5g通信模块,实际应用时,实时数据传输模块中搭载有5g信号卡,相应的需要在管廊入口处设置5g数据接收器,从而确保机器人在地下管廊中能够将所获取的图像、环境参数等信息实时回传到地面工作站。
57.在某些实施例中,参考附图1、附图2、附图3、附图4、附图5和附图6,视觉模块包括摄像头230,摄像头230的前端设置有防护罩240。为了避免砂石等外物的冲击导致摄像头230损坏,在摄像头230的前端设置防护罩240能够有效保护摄像头。
58.在某些实施例中,参考附图1、附图2、附图3、附图4、附图5、附图6和附图7,防护罩
240的前端还设置有洗刷罩250,洗刷罩250转动设置在机器人主体200上;洗刷罩250通过转动能够完全覆盖防护罩240。
59.在实际应用时,地下管廊的环境一般都比较复杂,有可能存在较多粉尘,为了确保摄像头230能够时刻获取清晰的图像,通过在防护罩240前端设置洗刷罩250以清理附着在防护罩240表面的粉尘和污物。
60.在某些实施例中,参考附图1、附图2、附图3、附图4、附图5、附图6和附图7,机器人主体200中安装有净水箱400、污水箱500、第一水泵410和第二水泵510;
61.洗刷罩250包括位于内部的空腔251、位于上侧的进水口252、位于下侧的出水口253以及多个雾化喷头254,多个雾化喷头254安装在洗刷罩250朝向防护罩240的侧面上,并与空腔251连通;进水口252与空腔251连通,且进水口252与净水箱400连通;出水口253贯通洗刷罩250朝向防护罩240的侧面,且与污水箱500连通;
62.第一水泵410安装在净水箱400和进水口252之间,用于将位于净水箱400中的洁净水泵入空腔251中;
63.第二水泵510安装在污水箱500和出水口253之间,用于将位于洗刷罩250朝向防护罩240的侧面上的污水泵入污水箱500中。
64.本实施例中,在机器人开始作业前,用户需要往净水箱400中灌入洁净水,在需要对防护罩240进行清洗时,控制洗刷罩250转动使其完全覆盖在防护罩240上后,第一水泵410将洁净水从净水箱400中抽出并泵入到空腔251中,空腔251中注满洁净水后,雾化喷头254再抽取空腔251中的洁净水并以水雾形式喷洒在防护罩240表面,雾化的洁净水能够均匀覆盖在防护罩240表面,有利于确保防护罩240各个位置都能够被清洁;同时,喷洒到防护罩240上的洁净水最后受重力作用流入到出水口253处,由第二水泵510将污水抽入到污水箱500中。
65.在某些实施例中,参考附图4、附图6和附图7,洗刷罩250还包括环形的刮片255,刮片255与防护罩240贴合。
66.雾化的洁净水可能会以小水珠的形式附着在防护罩240表面而未能流入出水口253处,在水分蒸发后在防护罩240表面形成水印,导致影响图像质量;为了解决上述问题,本实施例通过在洗刷罩250靠近防护罩240的一侧设置刮片255,刮片255与防护罩240的表面贴合,随着洗刷罩250转动,刮片255遍历防护罩240的表面,从而将水珠从防护罩240表面刮除,刮除的水珠会在刮片255处汇聚成水流最终流入到出水口253处。
67.在某些实施例中,出水口253的上端设置有倒角弧面。设置倒角弧面,能够有效引导水流流向,避免水流积聚在出水口253的上端。
68.在某些实施例中,机器人主体200设置有两个凹槽,净水箱400和污水箱500均以可拆卸的连接方式分别安装在对应的一个凹槽中。净水箱400和污水箱500可以通过螺纹连接、卡扣连接、铰链连接、磁吸连接等连接方式安装到凹槽中,可拆卸的连接方式能够方便用户更换和清理净水箱400和污水箱500。
69.综上所述,虽然本实用新型已以优选实施例揭露如上,但上述优选实施例并非用以限制本实用新型,本领域的普通技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与润饰,因此本实用新型的保护范围以上述所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1