一种监控设备的制作方法
1.本实用新型涉及监控成像技术领域,更具体地说,涉及一种监控设备。
背景技术:
2.现有技术中,枪机监控设备只能拍摄固定区域,监控范围有限,而球机监控设备虽然可以360
°
区域拍摄,但是只能通过后来设置预制位来进行自动巡航,即预先设置一个外部命令使监控系统自动地按设定的预置点顺序以设定的时间间隔往复不停地运动以实现对目前区域的监控,在某个时间点它只能监控到部分区域,无法同时监控到360
°
范围内的情况,在间隔往返运动过程中极易错失特定追踪目标的监控信息。
3.另外,现有专利公开了一种可主动追踪入侵目标的监控设备,但是受结构布局的限制,拍摄部分可俯仰转动的角度有限,可监控范围较小。
4.综上所述,如何提供一种可主动追踪入侵目标并增大监控范围的监控设备,是目前本领域技术人员亟待解决的问题。
技术实现要素:
5.有鉴于此,本实用新型的目的是提供一种监控设备,可主动追踪入侵目标,并且可以增大拍摄组件的拍摄范围,以增大监控范围。
6.为了实现上述目的,本实用新型提供如下技术方案:
7.一种监控设备,包括:
8.壳体组件,设置有用于安装于外部设备的安装支架;
9.全景雷达,绕第一旋转轴可转动的设置于所述壳体组件的上部,以对环境进行实时扫描,获取监控目标;
10.驱动腔组件,绕第一旋转轴可转动的设置于所述壳体组件的下部;所述驱动腔组件设置有避让槽,所述避让槽贯穿所述驱动腔组件相对的两侧面,以避免对拍摄组件的拍摄造成遮挡;
11.所述拍摄组件,绕第二旋转轴可转动的设置于所述避让槽内,且所述第二旋转轴的轴向垂直于所述第一旋转轴的轴向,且所述拍摄组件可随所述驱动腔组件同步转动。
12.可选地,所述驱动腔组件绕所述第一旋转轴可360
°
转动;
13.和/或,所述拍摄组件绕所述第二旋转轴可360
°
转动。
14.可选地,所述拍摄组件包括拍摄壳体和设置于所述拍摄壳体内的拍摄模组,所述拍摄模组包括可见光摄像头、红外摄像头、微光摄像头中的至少一者。
15.可选地,所述驱动腔组件包括驱动腔壳体,所述驱动腔壳体为倒置的u形结构,所述拍摄组件设置有两同轴的转动轴,两所述转动轴分别可转动的设置于所述倒置的u形结构的两侧壁。
16.可选地,所述驱动腔壳体内设置有第一驱动机构以及第二驱动机构,所述第一驱动机构用于驱动所述驱动腔壳体绕所述第一旋转轴转动,所述第二驱动机构用于驱动所述
拍摄组件绕所述第二旋转轴转动。
17.可选地,所述壳体组件朝向所述驱动腔壳体的一侧设置有凸轴,所述驱动腔壳体设置有用于与所述凸轴配合的凹槽,所述凹槽内设置有套设于所述凸轴外周的第一轴承;所述第一驱动机构包括:
18.第一动力件,固设于所述驱动腔壳体内;
19.第一齿轮带,由所述第一动力件带动传动;
20.第一带轮,与所述凸轴固定连接,且所述第一带轮与所述第一齿轮带啮合传送。
21.可选地,所述驱动腔壳体设置有套设于所述转动轴外周的第二轴承,所述第二驱动机构包括:
22.第二动力件,固设于所述驱动腔壳体内;
23.第二齿轮带,由所述第二动力件带动传动;
24.第二带轮,与所述转动轴固定连接,且所述第二带轮与所述第二齿轮带啮合传送。
25.可选地,所述全景雷达为红外全景雷达。
26.可选地,所述壳体组件包括上壳体和固设于所述上壳体下部的下壳体,所述上壳体的上部设置有用于防护所述全景雷达的防水密封罩,且所述防水密封罩为透红外波段的柔性材料。
27.可选地,所述驱动腔组件在所述第一旋转轴处设置有滑环,所述驱动腔组件内的电缆及所述拍摄组件的电缆均由所述滑环穿出。
28.在使用本实用新型提供的监控设备的过程中,当监控内没有监控目标时,全景雷达以一定速度连续旋转并探测监控范围内目标,拍摄组件可以自动地按设定的预置点顺序以设定的时间间隔往复不停地运动以实现对目前区域的监控;当监控内出现监控目标时,全景雷达在探测过程中会发现监控目标,并将信息传递至相关控制系统,控制系统根据全景雷达获取的信息调整驱动腔组件绕第一旋转轴的拍摄角度以及拍摄组件绕第二旋转轴的拍摄角度,以对全景雷达获取的监控目标进行监控记录。
29.相比于现有技术,本实用新型提供的监控设备在使用的过程中,可以通过全景雷达获取监控目标,实现主动追踪入侵目标,可避免错失监控目标;另外,驱动腔组件在绕第一旋转轴转动的过程中,可以带动拍摄组件绕第一旋转轴转动,拍摄组件自身可以绕第二旋转轴转动,并且腔体组件中设置有避让槽,可有效避免对拍摄组件的遮挡以及对拍摄组件绕第二旋转轴转动范围的影响,进一步增大拍摄组件的拍摄范围,从而增大监控范围。
附图说明
30.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
31.图1为本实用新型所提供的监控设备的具体实施例的结构示意图;
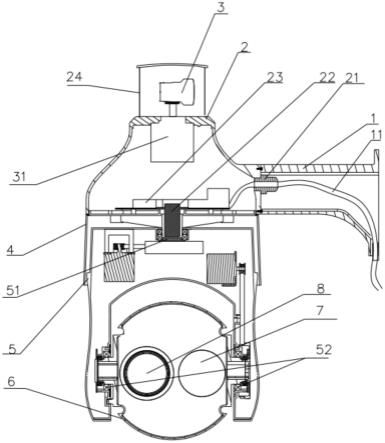
32.图2为图1中监控设备的剖面示意图;
33.图3为图1中监控设备的部分结构的另一角度的剖面示意图;
34.图4为下壳体的结构示意图。
35.图1-4中:
36.1为安装支架、11为电缆、2为上壳体、21为防水插头、22为滑环、23为电控板、24为防水密封罩、3为全景雷达、31为雷达电机、4为下壳体、41为凸轴、5为驱动腔组件、51为轴承挡环、52为第二轴承、53为第一带轮、54为第一轴承、55为第一齿轮带、56为第一动力件、57为第二动力件、58为第二齿轮带、59为第二带轮、6为拍摄壳体、7为可见光摄像头、8为红外摄像头。
具体实施方式
37.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
38.本实用新型的核心是提供一种监控设备,可主动追踪入侵目标,并且可以增大拍摄组件的拍摄范围,以增大监控范围。
39.请参考图1-图4。
40.本具体实施例公开了一种监控设备,包括:壳体组件,设置有用于安装于外部设备的安装支架1;全景雷达3,绕第一旋转轴可转动的设置于壳体组件的上部,以对环境进行实时扫描,获取监控目标;驱动腔组件5,绕第一旋转轴可转动的设置于壳体组件的下部;驱动腔组件5设置有避让槽,避让槽贯穿驱动腔组件5相对的两侧面,以避免对拍摄组件的拍摄造成遮挡;拍摄组件,绕第二旋转轴可转动的设置于避让槽内,且第二旋转轴的轴向垂直于第一旋转轴的轴向。
41.本具体实施例提供的监控设备包括控制系统,控制系统可以接收全景雷达3及拍摄组件获取的信息,并能够通过全景雷达3获取的信息定位监控目标位置,并控制拍摄组件动作。
42.在使用本具体实施例提供的监控设备的过程中,当监控内没有监控目标时,全景雷达3以一定速度连续旋转并探测监控范围内目标,拍摄组件可以自动地按设定的预置点顺序以设定的时间间隔往复不停地运动以实现对目前区域的监控;当监控内出现监控目标时,全景雷达3在探测过程中会发现监控目标,并将信息传递至相关控制系统,控制系统根据全景雷达3获取的信息调整驱动腔组件5绕第一旋转轴的拍摄角度以及拍摄组件绕第二旋转轴的拍摄角度,以对全景雷达3获取的监控目标进行监控记录。
43.相比于现有技术,本具体实施例提供的监控设备在使用的过程中,可以通过全景雷达3获取监控目标,实现主动追踪入侵目标,可避免错失监控目标;另外,驱动腔组件5在绕第一旋转轴转动的过程中,可以带动拍摄组件绕第一旋转轴转动,拍摄组件自身可以绕第二旋转轴转动,并且腔体组件中设置有避让槽,可有效避免对拍摄组件的遮挡以及对拍摄组件绕第二旋转轴转动范围的影响,进一步增大拍摄组件的拍摄范围,从而增大监控范围。
44.在一具体实施例中,驱动腔组件5绕第一旋转轴可360
°
转动;和/或,拍摄组件绕所述第二旋转轴可360
°
转动。
45.在具体使用的过程中,驱动腔组件5绕第一旋转轴360
°
转动的过程中会带动拍摄
组件绕第一旋转轴转动,拍摄组件自身可绕第二旋转轴360
°
转动,因此,可以实现拍摄组件绕第一旋转轴和第二旋转轴的360
°
转动,当第一旋转轴为竖直的轴时,第二旋转轴则位于垂直于第一旋转轴的平面内,并且拍摄组件绕第二旋转轴的转动为俯仰转动;可有效增大拍摄组件的俯仰角,增大监控范围。
46.需要进行说明的是,在机械结构方面,拍摄组件绕第二旋转轴可360
°
转动,但是在实际使用的过程中,根据实际使用的需要,可能不需要对上部空间进行监控,或者驱动腔组件5的部分结构遮挡了拍摄组件对上部空间的监控;因此,会把拍摄组件绕第二旋转轴的转动角度限定在一定角度范围内,具体根据实际情况确定;一般情况下,除了被驱动腔组件5遮挡的拍摄角度,其它角度范围一般均为监控范围。
47.拍摄组件包括拍摄壳体6和设置于拍摄壳体6内的拍摄模组,拍摄模组包括可见光摄像头7、红外摄像头8、微光摄像头中的至少一者;当拍摄模组包括红外摄像头8时,可以将全景雷达3设置为红外全景雷达,可通过红外寻找监控目标,实现夜间监控功能,并且能在夜间对监控目标进行监控。当拍摄模组包括可见光摄像头7时,需要安装对应的探照灯。如图1所示,可以使拍摄模组包括可见光摄像头7和红外摄像头8,红外摄像头8可以为红外变焦摄像头。
48.在一具体实施例中,如图2所示,驱动腔组件5包括驱动腔壳体,驱动腔壳体为倒置的u形结构,拍摄组件设置有两同轴的转动轴,两转动轴分别可转动的设置于倒置的u形结构的两侧壁。倒置的u形结构的两侧壁均设置有凹部,两转动轴分别可转动的设置于两凹部内,且凹部内设置有第二轴承52;第二轴承52套设于转动轴的外周。
49.驱动腔壳体内设置有第一驱动机构以及第二驱动机构,第一驱动机构用于驱动驱动腔壳体绕第一旋转轴转动,第二驱动机构用于驱动拍摄组件绕第二旋转轴转动。
50.第二驱动机构包括:第二动力件57,固设于驱动腔壳体内;第二齿轮带58,由第二动力件57带动传动;第二带轮59,与转动轴固定连接,且第二带轮59与所述第二齿轮带58啮合传送;可以将第二动力件57设置为俯仰电机,通过俯仰电机带动第二齿轮带58传送,并带动第二带轮59转动,第二带轮59转动的过程中带动转动轴转动,从而实现拍摄组件绕第二旋转轴的转动,通过改变俯仰电机的转动方向可以调节拍摄组件的转动方向,具体的,可以通过控制系统控制俯仰电机的转速及转向。
51.壳体组件包括上壳体2和下壳体4,上壳体2与安装支架1固定连接,安装支架1向上壳体2的外周侧面延伸,用于安装于外界墙体等外部设备;下壳体4朝向驱动腔壳体的一侧设置有凸轴41,驱动腔壳体设置有用于与凸轴41配合的凹槽,凹槽内设置有套设于凸轴41外周的第一轴承54;第一驱动机构包括:第一动力件56,固设于驱动腔壳体内;第一齿轮带55,由第一动力件56带动传动;第一带轮53,与所述凸轴41固定连接,且第一带轮53与所述第一齿轮带55啮合传送。
52.具体使用的过程中,可以将第一动力件56设置为周扫电机,周扫电机带动第一齿轮带55传动,第一齿轮带55与第一带轮53啮合,正常情况下会带动第一带轮53转动,但是由于壳体组件固定设置,且第一带轮53通过轴承挡环51与下壳体4固定连接,因此,会反向驱动驱动腔组件5绕第一旋转轴转动,同时,带动拍摄组件绕第一旋转轴同步转动。
53.在本具体实施例中,具体的,可以使凸轴41与第一轴承54的轴承挡环51固定连接,轴承挡环51与第一带轮53固定连接,当然,还可以是其它满足要求的连接方式,在此不做赘
述。
54.本具体实施例中,将第一驱动机构和第二驱动机构均设置于驱动腔壳体的内部,可避免第一驱动机构和第二驱动机构对拍摄组件绕第二旋转轴的转动造成干涉,尽可能增大拍摄组件的俯仰角度。
55.在一具体实施例中,可以在上壳体2的上部设置用于防护全景雷达3的防水密封罩24,且防水密封罩24为透红外波段的柔性材料;可以在上壳体2设置电控板23,在电控板23安装相关电器元件,实现对雷达电机31、全景雷达3、驱动腔组件5、拍摄组件的工作的控制。
56.如图2所示,驱动腔组件5在第一旋转轴处设置有滑环22,驱动腔组件5内的电缆11及所述拍摄组件的电缆11均由滑环22穿出;穿出滑环22的电缆11连接于电控板23,并由电控板23控制协调后经过防水插头21导出整机外供用户接入监控系统。
57.本技术文件中提到的第一动力件56和第二动力件57,第一轴承54和第二轴承52,第一带轮53和第二带轮59,第一齿轮带55和第二齿轮带58中的“第一”、“第二”仅仅是为了区别位置的不同,并没有先后顺序之分。
58.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。本实用新型所提供的所有实施例的任意组合方式均在此实用新型的保护范围内,在此不做赘述。
59.以上对本实用新型所提供的监控设备进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1