一种基于磁流变液的管道磁控机器人的制作方法
本技术涉及亚厘米级管道机器人,尤其涉及一种基于磁流变液的管道磁控机器人。
背景技术:
1、近些年来,微型管道机器人迅速发展,与传统的机电一体化系统一样,微型管道机器人系统也由机构本体、执行装置、检测装置、控制系统、动力系统等几部分组成,微型管道机器人的驱动控制系统由驱动器、通信和能量供给等部分组成,是微小型机器人的关键基础部件,它的性能直接影响微小型机器人机构的性能。
2、现有的管道机器人大都是履带或者轮胎式机器人,这样的管道机器人主要用于在水平管道和倾斜角度较小的管道行走。当管道倾斜角度较大或者竖直时,履带式、轮胎式管道机器人只有下端的履带和轮胎和管道内壁进行接触,履带轮胎与管道内壁的摩擦力不足,管道机器人很难在管道内行走,并且很容易从管道脱落。
技术实现思路
1、为了克服上述背景技术中存在的不足,本实用新型的目的在于提供一种基于磁流变液的管道磁控机器人,本实用新型利用磁流变液与内部驱动永磁体组合,提高了微型磁控机器人的磁感应强度和表面变形能力;左支架、右支架能够径向扩张-收缩,调节机器人表面与管道内壁的接触摩擦力,实现了在大角度斜管道和垂直管道中的运动,有效解决了上述背景技术中提出的问题。
2、为实现上述目的,本实用新型技术解决方案如下:
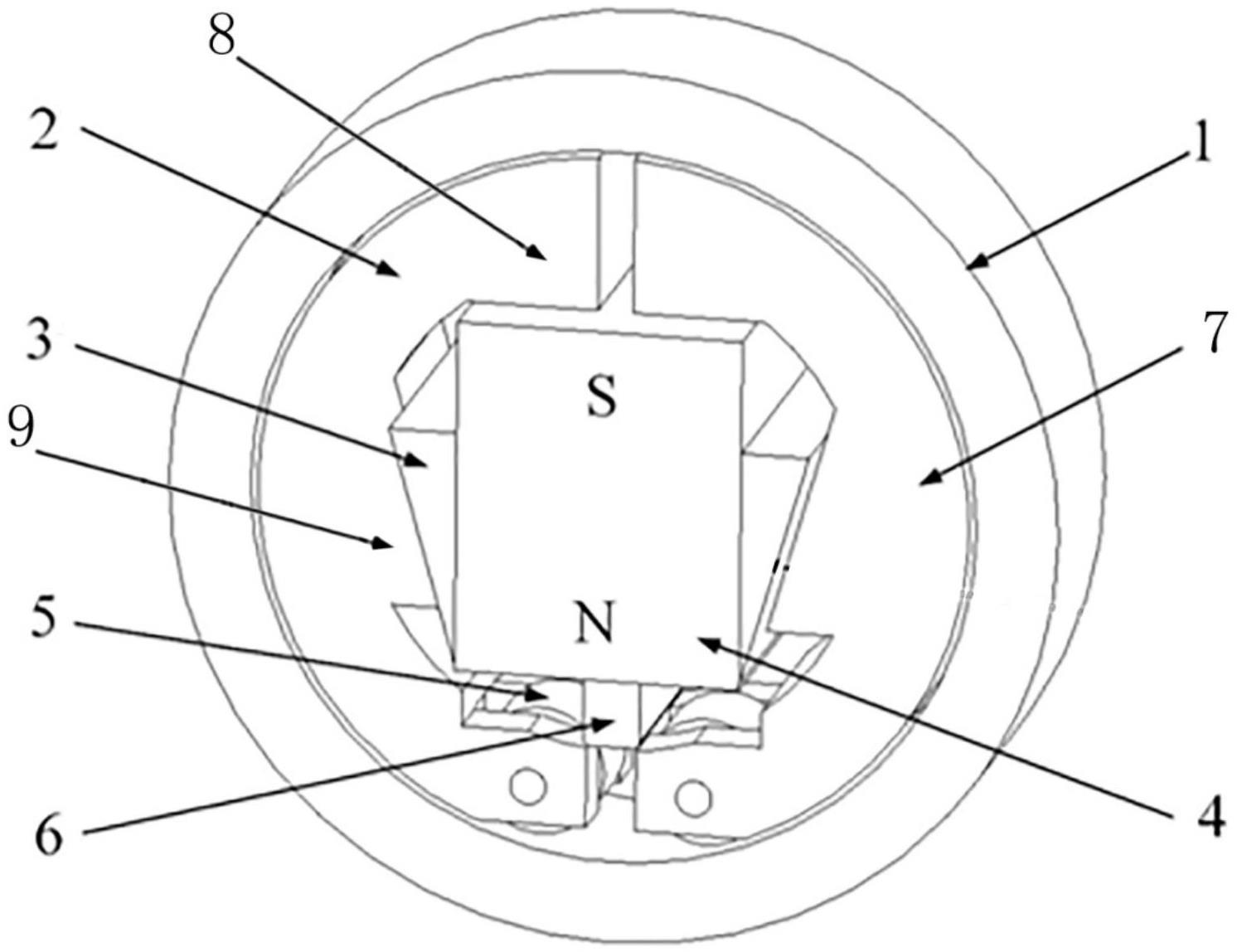
3、一种基于磁流变液的管道磁控机器人,其特征在于:包括填充磁流变液的软体橡胶环、内部驱动永磁体、滑块、滚轮以及相互对称的左支架、右支架,所述左支架、右支架为半环形并且套接在软体橡胶环内,所述内部驱动永磁体嵌入左支架、右支架之间,所述滑块固接在内部驱动永磁体的下端,所述滚轮铰接在左支架、右支架的下端,所述滑块位于两个滚轮中间并做上下滑动。
4、优选地,所述左支架、右支架靠近内部驱动永磁体的一侧设置有相互对称的侧限位块,所述内部驱动永磁体沿侧限位块做上下滑动,所述侧限位块内部驱动永磁体进行限位,使内部驱动永磁体上下移动时,不会跑偏和倾斜,使内部驱动永磁体上的滑块可以准确的插入到滚轮之间。
5、优选地,所述侧限位块设置成上窄下宽的倾斜面,所述内部驱动永磁体两侧固接有下窄上宽的斜块,所述斜块与侧限位块滑动连接,所述左支架、右支架内表面的上侧设置有上限位块,所述上限位块与内部驱动永磁体上侧形状相匹配,内部驱动永磁体收缩时,内部驱动永磁体正好嵌在侧限位块与上限位块之间,两个侧限位块和上限位块对内部驱动永磁体进行限位。
6、本实用新型有益效果如下:
7、1、本实用新型利用磁流变液与内部驱动永磁体组合,提高了微型磁控机器人的磁感应强度和表面变形能力;
8、2、本实用新型利用外部驱动永磁体控制内部驱动永磁体向上或向下移动,当内部驱动永磁体向下移动时,带动滑块插入滚轮中,实现左支架、右支架径向扩张,进而使软体橡胶环扩张,当内部驱动永磁体向上移动时,带动滑块远离滚轮,实现左支架、右支架收缩,进而使软体橡胶环收缩,通过软体橡胶环的收缩和扩张,调节机器人表面与管道内壁的接触摩擦力,实现了在小尺寸斜管道和垂直管道中的运动。
9、本实用新型操作简单,功能实用,十分值得推广。
技术特征:
1.一种基于磁流变液的管道磁控机器人,其特征在于:包括填充磁流变液的软体橡胶环、内部驱动永磁体、滑块、滚轮以及相互对称的左支架、右支架,所述左支架、右支架为半环形并且套接在软体橡胶环内,所述内部驱动永磁体嵌入左支架、右支架之间,所述滑块固接在内部驱动永磁体的下端,所述滚轮铰接在左支架、右支架的下端,所述滑块位于两个滚轮中间并做上下滑动。
2.如权利要求1所述的一种基于磁流变液的管道磁控机器人,其特征在于:所述左支架、右支架靠近内部驱动永磁体的一侧设置有相互对称的侧限位块,所述内部驱动永磁体沿侧限位块做上下滑动。
3.如权利要求2所述的一种基于磁流变液的管道磁控机器人,其特征在于:所述侧限位块设置成上窄下宽的倾斜面,所述内部驱动永磁体两侧固接有下窄上宽的斜块,所述斜块与侧限位块滑动连接,所述左支架、右支架内表面的上侧设置有上限位块,所述上限位块与内部驱动永磁体上侧形状相匹配。
技术总结
本技术涉及亚厘米级管道机器人技术领域,尤其涉及一种基于磁流变液的管道磁控机器人,包括填充磁流变液的软体橡胶环、内部驱动永磁体、滑块、滚轮以及相互对称的左支架、右支架,左支架、右支架为半环形并且套接在软体橡胶环内,内部驱动永磁体嵌入左支架、右支架之间,滑块固接在内部驱动永磁体的下端,滚轮铰接在左支架、右支架的下端,滑块位于两个滚轮中间并做上下滑动,本技术利用磁流变液与内部驱动永磁体组合,提高了微型磁控机器人的磁感应强度和表面变形能力,左支架、右支架能够径向扩张‑收缩,调节机器人表面与管道内壁的接触摩擦力,实现了在大角度斜管道和垂直管道中的运动。
技术研发人员:华德正,刘新华,郝敬宾,王百一,申玉瑞,方淙敏
受保护的技术使用者:宿迁中矿智能装备研究院有限公司
技术研发日:20221206
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!