一种基于视觉目标跟踪与识别装置
1.本实用新型涉及图像制导技术领域,具体为一种基于视觉目标跟踪与识别装置。
背景技术:
2.精确制导技术涉及的内容广泛,是一项综合多种现代高新技术的应用技术,研究的主要内容包括弹载精确探测、信息支援综合利用和高精度导引控制技术,其中弹载精确探测技术主要用于对目标精确探测、识别和跟踪;
3.对于制导技术的研究主要集中于视觉目标跟踪以及图像采集处理,但传统的图像采集装置位置较为固定,虽然设置有滑轨能够实现对图像采集装置位置进行调节,但其调节方式仍然较为简单,并排设置的多台摄像机联动时容易相互遮挡造成丢失目标的情况,其拍摄范围较小,识别的数值上存在误差。
技术实现要素:
4.本实用新型的目的在于提供一种基于视觉目标跟踪与识别装置,以解决上述背景技术中提出的普通的图像制导跟踪与识别装置可转动角度有限、目标场景识别方式简单、目标追踪精度较低,难以在复杂环境下对目标进行追踪与识别的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于视觉目标跟踪与识别装置,包括导轨,所述导轨的垂直投影为“匚”字形状,所述导轨的顶部开设有滑槽,滑槽的内部穿设有螺纹杆一,所述螺纹杆一贯穿导轨的一端固定连接有锥齿轮一;
6.所述导轨的左侧中间位置固定国连接有双头电机,所述双头电机的输出端固定连接有传动轴,所述转动轴的端部固定连接有锥齿轮二;
7.所述锥齿轮一与锥齿轮二相啮合;
8.所述螺纹杆一的外侧套设有滑座,所述滑座的侧面开设有滑槽,所述滑座的滑槽内部嵌入设置有螺纹杆二,所述螺纹杆二的外侧套设有连接座,所述连接座与滑座滑动连接,所述滑座的端部固定连接有伺服电机一;
9.所述连接座的端部固定连接有安装座,所述安装座的一侧固定连接有液压缸,所述液压缸的底部固定连接有滑轨;
10.所述滑轨的底部开设有滑槽,所述滑轨的底部滑动连接有调节座,所述调节座的顶部固定连接有伺服电机二,所述u伺服电机二的输出端固定连接有转轮,所述转轮的一端与滑轨底部滑槽侧壁抵接;
11.所述调节座的底部连接有摄像机。
12.优选的,所述调节座的底部挂载有包括:可见光摄像机与短波红外摄像机;
13.所述摄像机为普通红外摄像机,所述摄像机、可见光摄像机与短波红外摄像机呈三角形方式排列。
14.优选的,所述滑轨包括一个半圆轨道以及两个平直轨道,所述转轮抵接与滑轨的滑槽侧壁。
15.优选的,所述摄像机、可见光摄像机与短波红外摄像机均设置有与之匹配的云台。
16.优选的,所述调节座的顶部固定连接有伺服电机三,所述伺服电机三包括三台,三台所述伺服电机三分别对应摄像机、可见光摄像机与短波红外摄像机。
17.优选的,所述摄像机相对可见光摄像机与短波红外摄像机前后设置有5cm间隔。
18.优选的,所述摄像机的顶部固定安装有电动推杆,所述电动推杆竖向安装。
19.与现有技术相比,本实用新型的有益效果是:
20.1、该种基于视觉目标跟踪与识别装置,通过设置有摄像机、可见光摄像机、短波红外摄像机、电动推杆与云台,通过将可见光摄像机、短波红外摄像机以及摄像机呈三角方式排列,可见光摄像机、短波红外摄像机以及摄像机之间存在前后位置差,可见光摄像机、短波红外摄像机以及摄像机的焦点仍然重合,因而其能够保持良好的图像采集效果,利用云台使摄像机、可见光摄像机与短波红外摄像机均能够独立运动,通过云台能够提高该装置使用的灵活性,解决了普通的图像制导跟踪与识别装置可转动角度有限、目标场景识别方式简单、目标追踪精度较低,难以在复杂环境下对目标进行追踪与识别的问题。
21.2、其次,该种基于视觉目标跟踪与识别装置,通过设置有调节座、伺服电机三、伺服电机二、转轮、滑轨与电动推杆,通过伺服电机三进一步扩大摄像机、可见光摄像机与短波红外摄像机各自的转动范围,解决了普通的图像制导跟踪与识别装置可转动角度有限的问题,将摄像机向下布置,电动推杆带动摄像机向下移动,使其水平转动时四周保持无遮挡状态,能够提高装置操作的便捷性,同时能够降低装置操作的复杂性,能够提高装置使用的灵活性,解决了现有装置在使用时,结构比较复杂,操作不便的问题,滑轨呈现“u”字形状,转轮能够带动调节座大幅度覆盖导轨内侧区域,从而实现高精度目标追踪的效果。
附图说明
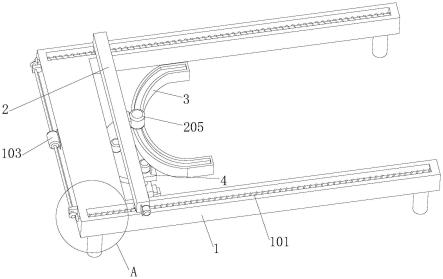
22.图1是本实用新型的整体结构示意图;
23.图2是本实用新型的图1中a处放大结构示意图;
24.图3是本实用新型的滑座结构示意图;
25.图4是本实用新型的滑轨结构示意图;
26.图5是本实用新型的调节座结构示意图;
27.图6是本实用新型的摄像机结构示意图;
28.图中:导轨1、螺纹杆一101、锥齿轮一102、双头电机103、传动轴104、锥齿轮二105、滑座2、螺纹杆二201、连接座202、伺服电机一203、安装座204、液压缸205、滑轨3、调节座4、伺服电机二401、转轮402、伺服电机三403、摄像机5、可见光摄像机501、短波红外摄像机502、电动推杆503、云台6。
具体实施方式
29.请参阅图1至3,本实用新型实施例中;
30.实施例1:一种基于视觉目标跟踪与识别装置,包括导轨1,导轨1的垂直投影为“匚”字形状,导轨1的顶部开设有滑槽,滑槽的内部穿设有螺纹杆一101,螺纹杆一101贯穿导轨1的一端固定连接有锥齿轮一102;
31.导轨1的左侧中间位置固定国连接有双头电机103,双头电机103的输出端固定连
接有传动轴104,转动轴104的端部固定连接有锥齿轮二105;
32.锥齿轮一102与锥齿轮二105相啮合;
33.螺纹杆一101的外侧套设有滑座2,滑座2的侧面开设有滑槽,滑座2的滑槽内部嵌入设置有螺纹杆二201,螺纹杆二201的外侧套设有连接座202,连接座202与滑座2滑动连接,滑座2的端部固定连接有伺服电机一203;
34.连接座202的端部固定连接有安装座204,安装座204的一侧固定连接有液压缸205,液压缸205的底部固定连接有滑轨3;
35.滑轨3的底部开设有滑槽,滑轨3的底部滑动连接有调节座4,调节座4的顶部固定连接有伺服电机二401,伺服电机二401的输出端固定连接有转轮402,转轮402的一端与滑轨3底部滑槽侧壁抵接;
36.调节座4的底部连接有摄像机5;
37.通过双头电机103带动传动轴104转动,锥齿轮二105带动锥齿轮一102转动,螺纹杆一101转动,滑座2与螺纹杆一101螺纹连接,滑座2与螺纹杆一101之间产生相对运动,滑座2相对导轨1水平移动;
38.伺服电机一203的输出端与螺纹杆二201固定连接,通过伺服电机一203带动螺纹杆二201转动,使连接座202与螺纹杆二201产生相对运动,连接座202相对滑座2的轴线相对运动;
39.通过液压缸205带动滑轨3上下位移,从而实现调节座4与摄像机5位置的灵活调节;
40.调节座4相对滑轨3滑动连接,通过伺服电机二401带动转轮402转动,转轮402的一端抵接于滑轨3的侧壁,在伺服电机二401的带动下,转轮402带动调节座4移动,进一步扩大摄像机5的活动范围,弥补其转动范围有限的问题,使用更加灵活。
41.实施例2:参考说明书附图2-6可得知,实施例2与实施1的不同在于:
42.调节座4的底部挂载有包括:可见光摄像机501与短波红外摄像机502;
43.摄像机5为普通红外摄像机,摄像机5、可见光摄像机501与短波红外摄像机502呈三角形方式排列;
44.通过将可见光摄像机501、短波红外摄像机502以及摄像机5呈三角方式排列,可见光摄像机501、短波红外摄像机502以及摄像机5之间存在前后位置差,可见光摄像机501、短波红外摄像机502以及摄像机5的焦点仍然重合,因而其能够保持良好的图像采集效果;
45.滑轨3包括一个半圆轨道以及两个平直轨道,转轮402抵接与滑轨3的滑槽侧壁;
46.滑轨3呈现“u”字形状,转轮402能够带动调节座4大幅度覆盖导轨1内侧区域,从而实现高精度目标追踪的效果;
47.摄像机5、可见光摄像机501与短波红外摄像机502均设置有与之匹配的云台6;
48.利用云台6使摄像机5、可见光摄像机501与短波红外摄像机502均能够独立运动,通过云台6能够提高该装置使用的灵活性,解决了普通的图像制导跟踪与识别装置可转动角度有限、目标场景识别方式简单、目标追踪精度较低,难以在复杂环境下对目标进行追踪与识别的问题;
49.调节座4的顶部固定连接有伺服电机三403,伺服电机三403包括三台,三台伺服电机三403分别对应摄像机5、可见光摄像机501与短波红外摄像机502;
50.通过伺服电机三403进一步扩大摄像机5、可见光摄像机501与短波红外摄像机502各自的转动范围,解决了普通的图像制导跟踪与识别装置可转动角度有限的问题;
51.摄像机5相对可见光摄像机501与短波红外摄像机502前后设置有5cm间隔;
52.摄像机501转动过程中不易受到遮挡;
53.摄像机5的顶部固定安装有电动推杆503,电动推杆503竖向安装;
54.将摄像机5向下布置,电动推杆503带动摄像机5向下移动,使其水平转动时四周保持无遮挡状态,能够提高装置操作的便捷性,同时能够降低装置操作的复杂性,能够提高装置使用的灵活性,解决了现有装置在使用时,结构比较复杂,操作不便的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1