车厢扫描机构的制作方法
本技术涉及扫描机构,尤其是涉及一种车厢扫描机构。
背景技术:
1、货物在装车转运时,常采用转运机器人进行转运至车厢内,为了更高效的对不同尺寸的货物进行转运,需要使用满足货物宽度的机器人,同时机器人也要满足能够伸入至车厢内部,现有通过人工进行判断,导致判断误差大,影响到货物的装车效率,严重时造成转运机器人和车厢尺寸不对应,致使两者之间发生碰撞并造成彼此损坏的现象。
技术实现思路
1、本实用新型要解决的技术问题是:为了解决现有通过人工进行判断,导致判断误差大,影响到货物的装车效率,严重时造成转运机器人和车厢尺寸不对应,致使两者之间发生碰撞并造成彼此损坏的现象的问题,现提供了一种车厢扫描机构。
2、本实用新型解决其技术问题所采用的技术方案是:一种车厢扫描机构,包括支架和测距传感器,所述支架上设置有用于驱动测距传感器往复摆动的摆动机构,所述支架上设置有用于控制摆动机构伸出或者收缩的控制机构,实现测距传感器伸出至所需测量位置或者收缩至初始位置。相比于现有技术,本方案通过摆动机构带动测距传感器往复摆动并可以对一定范围内进行检测扫描,同时由控制机构带动摆动机构伸出或者收缩至初始状态,可以便于检测传感器进行检测,检测精度高,根据检测结果来控制转运机器人两侧大梁的宽度,提高了转运机器人的装车效率,避免了转运机器人出现误差大的问题。
3、优选地一些实施方式,所述控制机构包括固定连接在支架上的气缸,所述测距传感器设置在气缸的伸出端上。
4、优选地一些实施方式,所述气缸的伸出端上固定连接有导轨架,所述摆动机构设置在导轨架上。
5、优选地一些实施方式,所述摆动机构包括伺服电机,所述伺服电机固定连接在导轨架上,所述测距传感器固定连接在伺服电机的伸出端上。
6、优选地一些实施方式,所述导轨架滑动设置在支架上。
7、优选地一些实施方式,所述支架上沿测距传感器位移方向设置有直线导轨,所述导轨架上设置有滑块,所述滑块与直线导轨相匹配,所述滑块滑动设置在直线导轨上。
8、优选地一些实施方式,所述导向架与测距传感器之间设置有用于限制测距传感器摆动范围的限位机构。
9、优选地一些实施方式,所述限位机构包括设置在测距传感器上的限位杆,所述限位杆沿测距传感器摆动方向位移,所述导向架上设置有两个档杆,两个所述档杆相对设置形成限制区,所述限制区用于限制限位杆摆动范围,所述限位杆设置在两个档杆之间。
10、本实用新型的有益效果是:本实用新型车厢扫描机构在使用时,通过摆动机构带动测距传感器往复摆动并可以对一定范围内进行检测扫描,同时由控制机构带动摆动机构伸出或者收缩至初始状态,可以便于检测传感器进行检测,检测精度高,根据检测结果来控制转运机器人两侧大梁的宽度,提高了转运机器人的装车效率,避免了现有通过人工进行判断,导致判断误差大,影响到货物的装车效率,严重时造成转运机器人和车厢尺寸不对应,致使两者之间发生碰撞并造成彼此损坏的现象的问题。
技术特征:
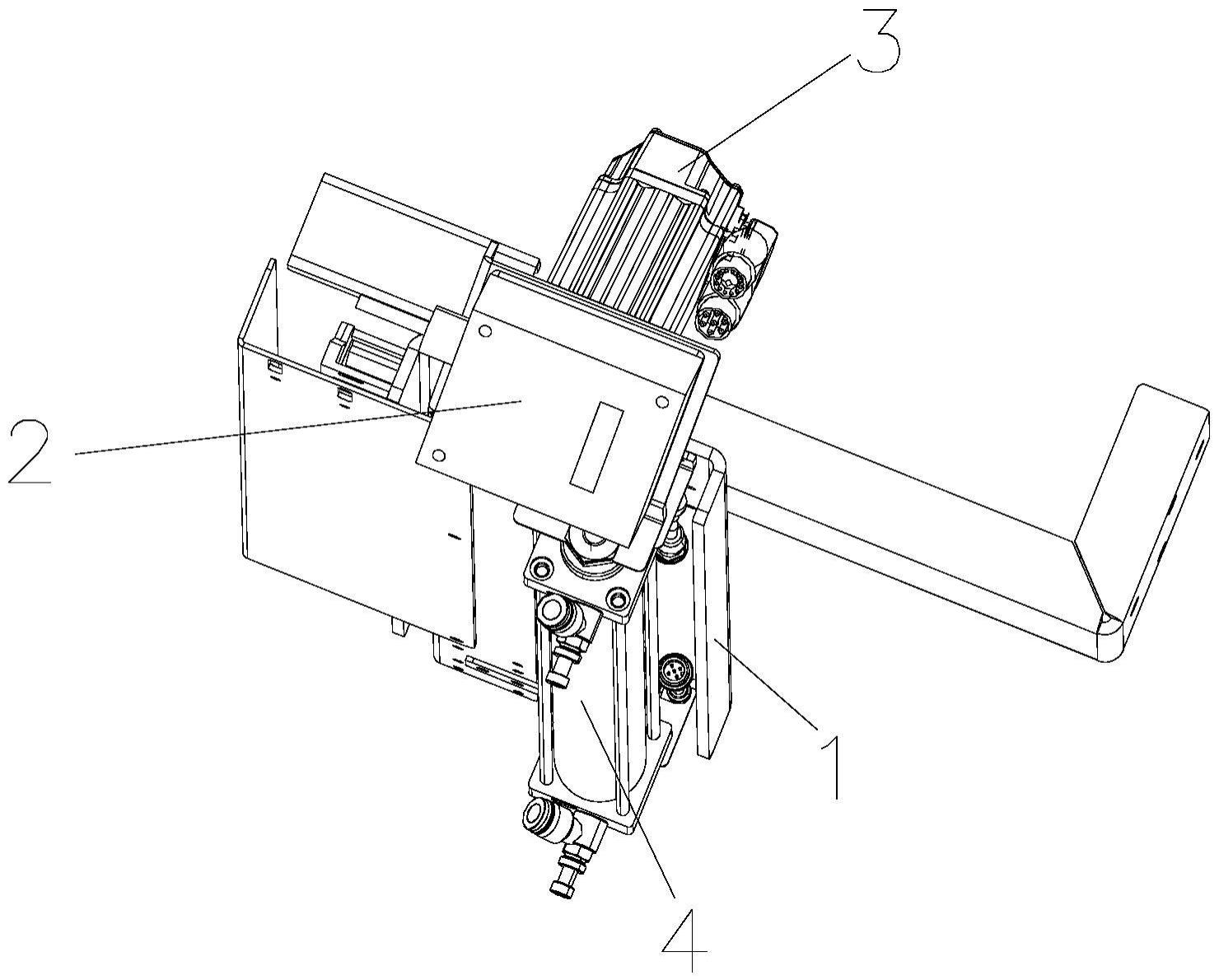
1.一种车厢扫描机构,其特征在于:包括支架(1)和测距传感器(2),所述支架(1)上设置有用于驱动测距传感器(2)往复摆动的摆动机构(3),所述支架(1)上设置有用于控制摆动机构(3)伸出或者收缩的控制机构(4),实现测距传感器(2)伸出至所需测量位置或者收缩至初始位置。
2.根据权利要求1所述的车厢扫描机构,其特征在于:所述控制机构(4)包括固定连接在支架(1)上的气缸,所述测距传感器(2)设置在气缸的伸出端上。
3.根据权利要求2所述的车厢扫描机构,其特征在于:所述气缸的伸出端上固定连接有导轨架(5),所述摆动机构(3)设置在导轨架(5)上。
4.根据权利要求3所述的车厢扫描机构,其特征在于:所述摆动机构(3)包括伺服电机,所述伺服电机固定连接在导轨架(5)上,所述测距传感器(2)固定连接在伺服电机的伸出端上。
5.根据权利要求4所述的车厢扫描机构,其特征在于:所述导轨架(5)滑动设置在支架(1)上。
6.根据权利要求5所述的车厢扫描机构,其特征在于:所述支架(1)上沿测距传感器(2)位移方向设置有直线导轨(6),所述导轨架(5)上设置有滑块,所述滑块与直线导轨(6)相匹配,所述滑块滑动设置在直线导轨(6)上。
7.根据权利要求6所述的车厢扫描机构,其特征在于:所述导轨架与测距传感器(2)之间设置有用于限制测距传感器(2)摆动范围的限位机构。
8.根据权利要求7所述的车厢扫描机构,其特征在于:所述限位机构包括设置在测距传感器(2)上的限位杆(7),所述限位杆(7)沿测距传感器(2)摆动方向位移,所述导轨架上设置有两个档杆(8),两个所述档杆(8)相对设置形成限制区,所述限制区用于限制限位杆(7)摆动范围,所述限位杆(7)设置在两个档杆(8)之间。
技术总结
本技术涉及扫描机构技术领域,尤其是涉及一种车厢扫描机构,包括支架和测距传感器,所述支架上设置有用于驱动测距传感器往复摆动的摆动机构,所述支架上设置有用于控制摆动机构伸出或者收缩的控制机构,实现测距传感器伸出至所需测量位置或者收缩至初始位置,本技术车厢扫描机构在使用时,通过摆动机构带动测距传感器往复摆动并可以对一定范围内进行检测扫描,同时由控制机构带动摆动机构伸出或者收缩至初始状态,可以便于检测传感器进行检测,检测精度高,根据检测结果来控制转运机器人两侧大梁的宽度,提高了转运机器人的装车效率。
技术研发人员:刘金石,李国亮,徐薛,张江涛
受保护的技术使用者:金石机器人常州股份有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!