一种双离合变速器拨叉静态挂挡控制方法、电子设备及汽车与流程
本发明涉及混合动力汽车纯电模式下湿式双离合器变速器拨叉静态挂挡的控制技术。
背景技术:
1、混合动力汽车可实现车辆在纯电模式和混动模式下行驶,由于其良好的燃油经济性,广受大众喜爱。在纯电模式下,当车辆处于静止状态时,电机会停机,此时驾驶员切换换挡手柄,电子控制单元tcu会控制液压模块完成拨叉静态挂挡动作,如静态挂1挡拨叉,静态挂倒挡拨叉。静态拨叉挂挡时,由于齿轮轴系无轴向转动,易出现结合齿齿套倒锥角与结合齿倒锥角顶齿导致拨叉挂挡失败。专利文献cn201510595536.7公开了一种双离合变速器挂挡失败的安全控制方法,通过监测目标挡位挂挡失败次数,当失败次数大于一定值后进入跛行工况并报警,但是没有具体涉及挂挡失败后再次挂挡如何处理避免多次挂挡失败问题。
技术实现思路
1、本发明提供一种双离合变速器拨叉静态挂挡控制方法、电子设备及汽车,用在混合动力汽车纯电模式下,以在发现拨叉挂挡出现结合齿齿套倒锥角与结合齿倒锥角顶齿时通过请求电机转速或增加离合器润滑使齿轮轴系产生轴向转动,错开顶齿位置,确保拨叉再次挂挡能够一次性成功,提高二次挂挡成功率。
2、本发明的技术方案如下:
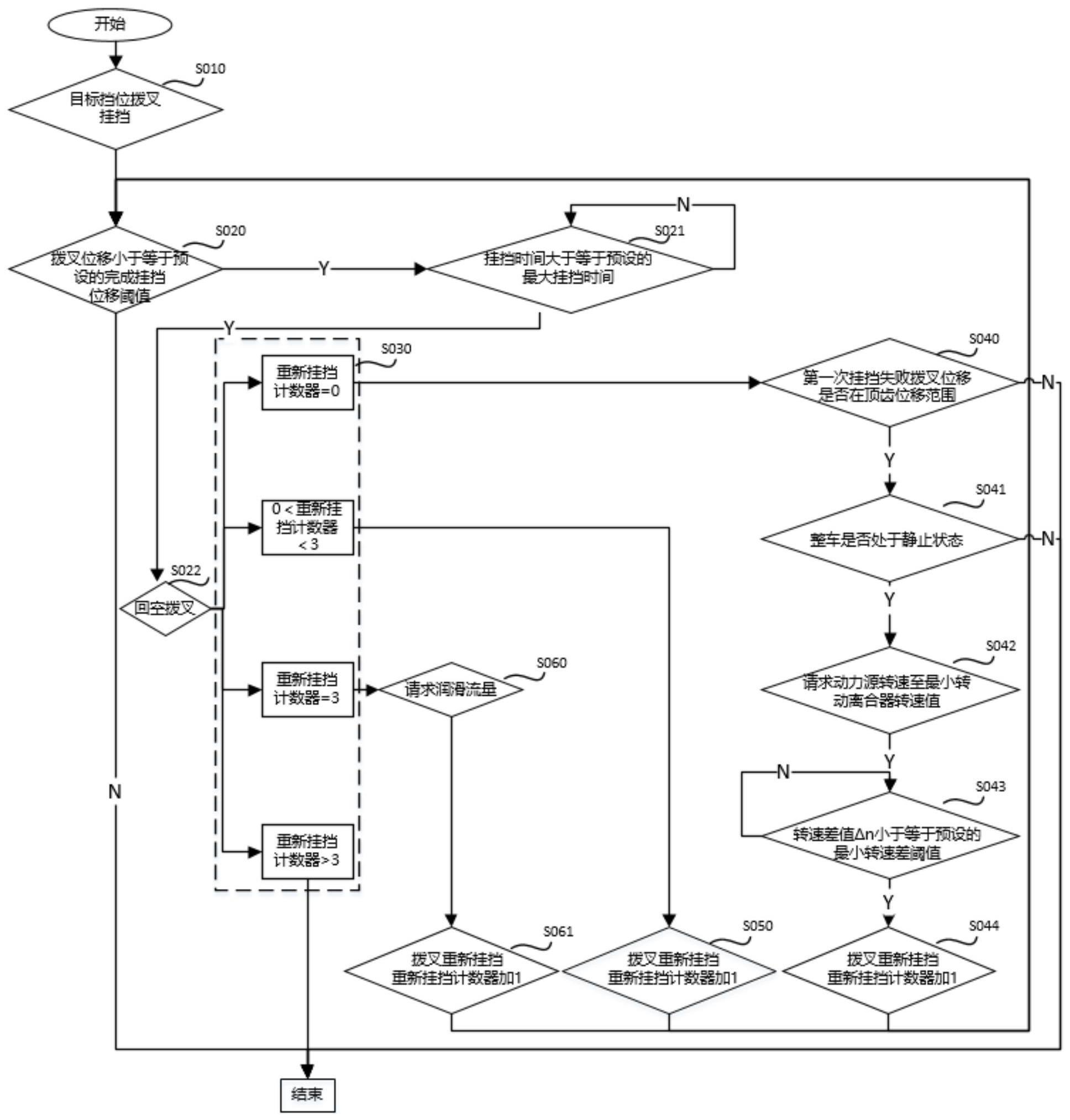
3、本发明在第一方面,一种双离合变速器拨叉静态挂挡控制方法,所述方法是当驾驶员有拨叉挂挡动作时,控制系统实时检测变速器状态,当发现变速器处于静态挂挡失败工况时,根据状态执行不同的处理策略,提高二次挂挡成功率。具体是是当在进行拨叉挂挡时,实时监测拨叉位移,若拨叉挂挡失败,通过拨叉位置和整车状态判断挂挡失败原因为静态结合齿齿套倒锥角与结合齿倒锥角顶齿时,则请求电机转速使齿轮轴系产生轴向转动,错开顶齿位置,重新挂档。
4、根据本发明一实施例所述,当拨叉位移小于等于预设的完成挂挡的位移阈值xend且挂挡时间大于等于预设的最大挂挡时间tmax时,判断为拨叉挂挡失败。
5、根据本发明一实施例所述,在重新挂挡时,首先判断第一次挂挡失败时拨叉的实际位移;当拨叉实际位移大于等于预设的顶齿最小位移xmin且拨叉实际位移小于等于预设的顶齿最大位移xmax时,判断为顶齿卡挡造成的挂挡失败;然后,判断整车状态是否处于静态;当判断车辆处于静止状态且拨叉挂挡失败原因为顶齿卡挡,tcu请求整车控制单元pcu控制动力源转速上升至预设的最小转动离合器转速值nmove,并实时检测动力源转速,当动力源转速与最小转动离合器转速阈值的差值δn小于等于预设的最小转速差阈值nmin,控制拨叉进行重新挂挡动作。
6、根据本发明一实施例,若重新挂挡失败,则系统控制拨叉再进行重新挂挡,如此循环,当挂挡次数大于n次时,n≥3,则放弃当前目标挡位拨叉挂挡动作。
7、或者,当挂挡次数大于n次时,n≥3,则同时请求打开液压系统润滑,电子控制单元请求润滑流量至预设的最小转动离合器润滑阈值lubemin,若拨叉挂挡成功,则挂挡动作完成,否则放弃当前目标挡位拨叉挂挡动作。
8、本发明在第二方面提供一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行以上所述的双离合变速器拨叉静态挂挡的控制方法的步骤。
9、本发明第三方面还提供一种汽车,其配置有以上所述的电子设备。
10、本发明采用以上技术方案,通过拨叉位置和整车状态判断挂挡失败原因为静态结合齿齿套倒锥角与结合齿倒锥角顶齿时,请求电机转速或增加离合器润滑使齿轮轴系产生轴向转动,错开顶齿位置,由此可以确保拨叉再次挂挡能够一次性成功,提高二次挂挡成功率。
技术特征:
1.一种双离合变速器拨叉静态挂挡控制方法,其特征在于,所述方法是当在进行拨叉挂挡时,实时监测拨叉位移,若判断拨叉挂挡失败,并通过拨叉位置和整车状态判断挂挡失败原因为静态结合齿齿套倒锥角与结合齿倒锥角顶齿时,则请求电机转速使齿轮轴系产生轴向转动,错开顶齿位置,重新挂档。
2.根据权利要求1所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,所述方法是当拨叉位移小于等于预设的完成挂挡的位移阈值xend且挂挡时间大于等于预设的最大挂挡时间tmax时,判断为拨叉挂挡失败。
3.根据权利要求1所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,在重新挂挡时,首先判断第一次挂挡失败时拨叉的实际位移;当拨叉实际位移大于等于预设的顶齿最小位移xmin且拨叉实际位移小于等于预设的顶齿最大位移xmax时,判断为顶齿卡挡造成的挂挡失败;然后,判断整车状态是否处于静态;当判断车辆处于静止状态且拨叉挂挡失败原因为顶齿卡挡,tcu请求整车控制单元pcu控制动力源转速上升至预设的最小转动离合器转速值nmove,并实时检测动力源转速,当动力源转速与最小转动离合器转速阈值的差值δn小于等于预设的最小转速差阈值nmin,控制拨叉进行重新挂挡动作。
4.根据权利要求3所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,若重新挂挡失败,则系统控制拨叉再进行重新挂挡,如此循环,当挂挡次数大于n次时,n≥3,则放弃当前目标挡位拨叉挂挡动作。
5.根据权利要求3所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,若重新挂挡失败,则系统控制拨叉再进行重新挂挡,如此循环,当挂挡次数大于n次时,n≥3,则同时请求打开液压系统润滑,电子控制单元请求润滑流量至预设的最小转动离合器润滑阈值lubemin,若拨叉挂挡成功,则挂挡动作完成,否则放弃当前目标挡位拨叉挂挡动作。
6.根据权利要求4或5所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,拨叉实际位移xact = (xtar-offset)/gain,其中offset是随变速器油温变化的偏移量,gain是随挂挡力变化的系数。
7.根据权利要求4或5所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,所述电子控制单元判断整车状态是,当动力源转速和离合器转速小于等于预设的最小静态转速阈值nmin,且离合器1/2压力小于等于预设的离合器打开阈值kmin,且车速小于等于预设的最小静态车速阈值vmin,系统判断为车辆处于静止状态。
8.根据权利要求4或5所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,所述电子控制单元需要实时获取目标挡位对应的拨叉位移xtar,目标挡位对应离合器转速nclutch,动力源转速npowerplant,离合器1和离合器2对应离合器压力k1pressure/k2pressure,车速v。
9.根据权利要求4或5所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,每重新挂挡1次,重新计数1次,当计数次数大于预设的最大挂挡次数nlimit,电子控制单元禁止当前目标挡位挂挡请求。
10.根据权利要求9所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,nlimit根据实际情况设置,一般设置为3。
11.根据权利要求9所述的双离合变速器拨叉静态挂挡控制方法,其特征在于,所述方法应用于混合动力汽车纯电模式下。
12.一种电子设备,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至11任一项所述的双离合变速器拨叉静态挂挡控制方法的步骤。
13.一种汽车,其特征在于,其配置有权利要求12所述的电子设备。
技术总结
本发明提供一种双离合变速器拨叉静态挂挡控制方法、电子设备及汽车,当在进行拨叉挂挡时,实时监测拨叉位移,若判断拨叉挂挡失败,并通过拨叉位置和整车状态判断挂挡失败原因为静态结合齿齿套倒锥角与结合齿倒锥角顶齿时,则请求电机转速使齿轮轴系产生轴向转动,错开顶齿位置,重新挂档,由此可以确保拨叉再次挂挡能够一次性成功,提高二次挂挡成功率。
技术研发人员:罗超文,张学勇,高海波,冯川
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!