可适应变径内腔的阀门容器内部检测柔体机器人的制作方法
本发明涉及管道检测机器人,具体而言,涉及一种可适应变径内腔的阀门容器内部检测柔体机器人。
背景技术:
1、目前,用于管道检测的机器人主要基于支撑管壁结构的刚性机器人,参考专利号为202222211140.6,名称为一种管道检测机器人的实用新型专利,以及申请公布号为cn114923062a,名称为自适应攀爬管道巡检机器人的发明专利申请。
2、基于支撑管壁结构的刚性机器人具有庞大的机械本体,较低的自由度,限制了其进入阀门或罐型容器等复杂空间中进行探测。对容器内部进行检测需要经过一段铸铁材质的法兰截止阀通道,阀门出入口直径为100~150mm,如果使用基于支撑管壁结构的刚性机器人,则难以顺利通过法兰截止阀门内部两个连续的弯道。此外基于支撑管壁结构的刚性机器人难以适应不同直径的管道。
3、机器人在管道、阀门、罐型容器探测和维修领域有着广泛的应用,目前机器人大多是刚性机器人,由于其相对庞大的机械本体,较低的自由度,限制了其进入阀门或罐型容器等复杂空间中进行探测。而软体机器人依靠其连续性、高柔顺性、高自由度的特性,具有较强的环境适应能力,可实现对复杂空间的探测。因此,如何研制灵活性更强、柔顺性更高、活动自由度更高、环境适应性更强的软体机器人是本领域技术人员亟待解决的技术问题。
4、对核电、热电、化工等行业中压力容器内部进行检测时往往需要经过一段管道,然后穿越阀门,再进入容器。阀门中个部位的尺寸往往变化很大,而且存在异形曲面、缩颈、凸台等复杂特征。例如dn125型截止阀,阀门出入口直径为125mm,最窄的阀口高度83mm。加之上述复杂特征,如果使用刚性机器人,则难以顺利通过截止阀内部各通道,且截止阀内部空间相对狭小,不利于机器人的运动。参考申请公布号为cn114505867a,名称为可穿越异形变径内腔的气囊式软体机器人的发明专利申请;参考申请公布号为cn110395327a,名称为全向弯曲仿尺蠖软体蠕动机器人的发明专利。目前的软体机器人,不能实现穿越阀门并进入容器爬壁的动作,不能实现管道-阀门-容器的全链路移动、检测,因此在设备检修时仍然需要解体部分设备。
技术实现思路
1、本发明就是为了解决现有软体机器人不能实现穿越阀门并进入容器爬壁的动作,不能实现管道-阀门-容器的全链路移动、检测的技术问题,提供一种能够穿越阀门并能够进入容器爬壁的可适应变径内腔的阀门容器内部检测柔体机器人。
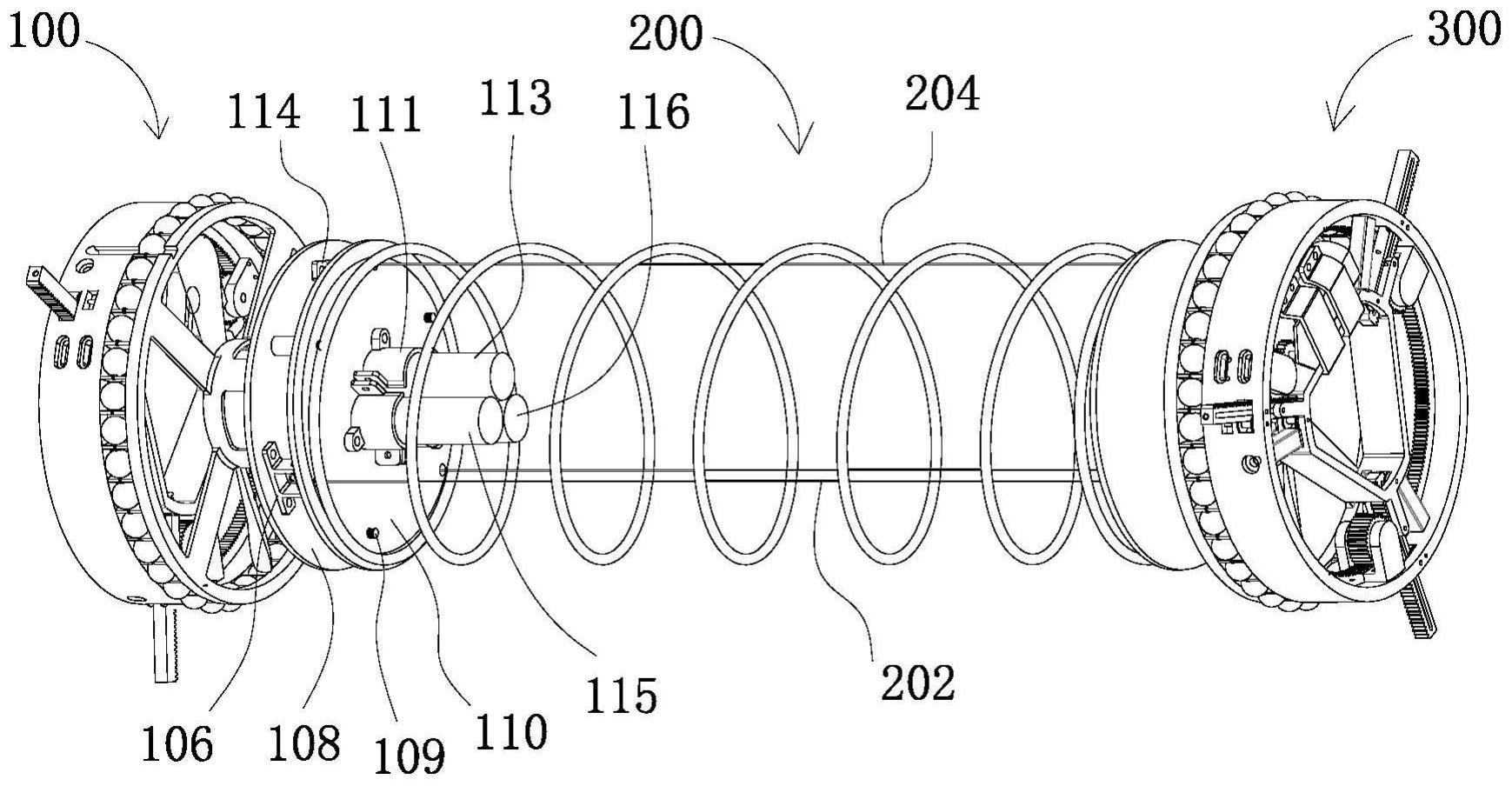
2、本发明提供一种可适应变径内腔的阀门容器内部检测柔体机器人,包括躯干、前肢和后肢,躯干包括弹簧、第一驱动丝、第二驱动丝和第三驱动丝,弹簧上沿长度方向设有三组导丝孔,第一驱动丝、第二驱动丝、第三驱动丝分别穿过三组导丝孔;在弹簧的径向方向上,第一驱动丝、第二驱动丝和第三驱动丝沿着弹簧的圆周均布;
3、前肢包括外板、内板、头部转向电机首端固定座、头部螺旋桨转向架、前转向轴、前转向架定位座、头部螺旋桨转向电机、第一导线轴架、第二导线轴架、第三导线轴架、第一导线轴、第二导线轴、第三导线轴、前电机座、头部转向电机尾端固定座、第一驱动电机、第二驱动电机、第三驱动电机、第一挡片、第二挡片、第三挡片、前支撑柱和前支撑吸附定位装置,内板通过若干个固定柱与外板固定连接,第一导线轴架、第二导线轴架和第三导线轴架与外板的内侧固定连接,第一导线轴架、第二导线轴架和第三导线轴架位于外板和内板之间,第一导线轴架、第二导线轴架、第三导线轴架沿圆周方向均布;第一导线轴与第一导线轴架固定连接,第二导线轴与第二导线轴架固定连接,第三导线轴与第三导线轴架固定连接;前电机座与内板固定连接,第一驱动电机、第二驱动电机和第三驱动电机与前电机座固定连接;第一挡片与第一驱动电机的输出轴固定连接,第二挡片与第二驱动电机的输出轴固定连接,第三挡片与第三驱动电机的输出轴固定连接;头部转向电机尾端固定座与内板固定连接,头部螺旋桨转向电机依次穿过外板、内板后固定连接在头部转向电机尾端固定座上,头部转向电机首端固定座与外板的外侧面固定连接;前转向架定位座与外板的外侧面固定连接,前转向轴与前转向架定位座固定连接,头部螺旋桨转向架的一端套在前转向轴上,头部螺旋桨转向架的另一端与头部螺旋桨转向电机的输出轴固定连接;前支撑柱与外板外侧面的中心位置固定连接;
4、前支撑吸附定位装置包括前圆圈型支撑架、前螺旋桨支架、前螺旋桨、前齿条支架、前螺旋桨驱动电机、第一前齿条、第二前齿条、第三前齿条、前伸缩驱动电机、第一前齿轮、第二前齿轮、第三前齿轮、前主动齿轮、第一前齿轮座、第二前齿轮座、第三前齿轮座和前齿圈,前螺旋桨支架与前圆圈型支撑架固定连接,前螺旋桨驱动电机与前螺旋桨支架固定连接,前螺旋桨与前螺旋桨驱动电机的输出轴连接,前齿条支架通过固定杆与前圆圈型支撑架固定连接,前伸缩驱动电机与前齿条支架固定连接,前主动齿轮与前伸缩驱动电机的输出轴连接,第一前齿轮座、第二前齿轮座、第三前齿轮座分别与前圆圈型支撑架的内壁固定连接,第一前齿轮座、第二前齿轮座和第三前齿轮座按圆周方向均布;第一前齿轮与第一前齿轮座连接,第二前齿轮与第二前齿轮座连接,第三前齿轮与第三前齿轮座连接,第一前齿轮、第二前齿轮和第三前齿轮以圆周方向均布;第一前齿轮座由两部分组成,第二前齿轮座由两部分组成,第三前齿轮座由两部分组成,前齿圈位于第一前齿轮座的两部分之间,前齿圈位于第二前齿轮座的两部分之间,前齿圈位于第三前齿轮座的两部分之间;前主动齿轮与第二前齿轮啮合,第二前齿轮与前齿圈啮合,第一前齿轮与前齿圈啮合,第三前齿轮与前齿圈啮合;第一前齿条的后部分与前齿条支架滑动连接,第一前齿条的前部分与前圆圈型支撑架滑动连接,第二前齿条的后部分与前齿条支架滑动连接,第二前齿条的前部分与前圆圈型支撑架滑动连接,第三前齿条的后部分与前齿条支架滑动连接,第三前齿条的前部分与前圆圈型支撑架滑动连接;;第二前齿条与第二前齿轮啮合,第一前齿条与第一前齿轮啮合,第三前齿条与第三前齿轮啮合;
5、第一驱动丝的前端穿过内板后先绕过第一导线轴,再缠绕在第一驱动电机的输出轴上;第二驱动丝穿过内板后先绕过第二导线轴,再缠绕在第二驱动电机的输出轴上;第三驱动丝穿过内板后先绕过第三导线轴再缠绕在第三驱动电机的输出轴上;弹簧的前端与内板固定连接;前螺旋桨支架与头部螺旋桨转向架固定连接;
6、后肢包括尾板、尾部电机座、尾部螺旋桨转向电机、尾部螺旋桨转向电机固定板、尾部螺旋桨转向架、后转向轴、后转向架定位座、后支撑柱和后支撑吸附定位装置,尾部电机座与尾板固定连接,尾部螺旋桨转向电机与尾部电机座连接,尾部螺旋桨转向电机固定板与尾板固定连接,后转向架定位座与尾板的外侧固定连接,后转向轴与后转向架定位座固定连接,后支撑柱与尾板外侧的中心位置固定连接,尾部螺旋桨转向架的一端套在后转向轴上,尾部螺旋桨转向架的另一端与尾部螺旋桨转向电机的输出轴固定连接;
7、后支撑吸附定位装置包括后圆圈型支撑架、后螺旋桨支架、后齿条支架,后螺旋桨、后螺旋桨驱动电机、第一后齿条、第二后齿条、第三后齿条、后伸缩驱动电机、第一后齿轮、第二后齿轮、第三后齿轮、后主动齿轮、第一后齿轮座、第二后齿轮座、第三后齿轮座和后齿圈,后螺旋桨支架与后圆圈型支撑架固定连接,后螺旋桨驱动电机固定连接在后螺旋桨支架上,后螺旋桨与后螺旋桨驱动电机的输出轴连接,后齿条支架通过固定杆与后圆圈型支撑架固定连接,后伸缩驱动电机与后齿条支架固定连接,后主动齿轮与后伸缩驱动电机的输出轴连接,第一后齿轮座、第二后齿轮座、第三后齿轮座分别与后圆圈型支撑架的内壁固定连接,第一后齿轮座、第二后齿轮座、第三后齿轮座按圆周方向均布,第一后齿轮、第二后齿轮、第三后齿轮分别与第一后齿轮座第二后齿轮座、第三后齿轮座连接,第一后齿轮、第二后齿轮、第三后齿轮以圆周方向均布;第一后齿轮座由两部分组成,第二后齿轮座由两部分组成,第三后齿轮座由两部分组成,后齿圈位于第一后齿轮座的两部分之间,后齿圈位于第二后齿轮座的两部分之间,后齿圈位于第三后齿轮座的两部分之间后主动齿轮与第二后齿轮啮合,第二后齿轮与后齿圈啮合,第一后齿轮与后齿圈啮合,第三后齿轮与后齿圈啮合;第一后齿条的后部分与后齿条支架滑动连接,第一后齿条的前部分与后圆圈型支撑架滑动连接,第二后齿条的后部分与后齿条支架滑动连接,第二后齿条的前部分与后圆圈型支撑架滑动连接,第三后齿条的后部分与后齿条支架滑动连接,第三后齿条的前部分与后圆圈型支撑架滑动连接;第二后齿条与第二后齿轮啮合,第一后齿条与第一后齿轮啮合,第三后齿条与第三后齿轮啮合;
8、尾部螺旋桨转向架与后螺旋桨支架的中心部位固定连接;
9、弹簧的后端与尾板固定连接,第一驱动丝、第二驱动丝、第三驱动丝的后端分别固定在尾板上。
10、优选地,前齿条支架设有第一前齿条连接部、第二前齿条连接部、第三前齿条连接部、第一前齿条过孔、第二前齿条过孔、第三前齿条过孔,第一前齿条连接部上连接有第一导向销,第二前齿条连接部上连接有第二导向销,第三前齿条连接部上连接有第三导向销,第一前齿条设有第一前滑动槽,第二前齿条设有第二前滑动槽,第三前齿条设有第三前滑动槽;第一前齿条位于第一前齿条连接部中,第一导向销的端部嵌入第一前齿条的第一前滑动槽中,第一前齿条穿过第一前齿条过孔;第二前齿条位于第二前齿条连接部中,第二导向销的端部嵌入第二前齿条的第二前滑动槽中,第二前齿条穿过第二前齿条过孔;第三前齿条位于第三前齿条连接部中,第三导向销的端部嵌入第三前齿条的第三前滑动槽中,第三前齿条穿过第三前齿条过孔;前圆圈型支撑架设有第一过孔、第二过孔、第三过孔,第一前齿条的前部、第二前齿条的前部、第三前齿条的前部分别穿过前圆圈型支撑架的第一过孔、第二过孔、第三过孔;
11、后齿条支架设有第一后齿条连接部、第二后齿条连接部、第三后齿条连接部、第一后齿条过孔、第二后齿条过孔、第三后齿条过孔,第一后齿条连接部上连接有第一导向销,第二后齿条连接部上连接有第二导向销,第三后齿条连接部上连接有第三导向销,第一后齿条设有第一后滑动槽,第二后齿条设有第二后滑动槽,第三后齿条设有第三后滑动槽,第一后齿条位于第一后齿条连接部中,第一导向销的端部嵌入第一后齿条的第一后滑动槽中,第一后齿条穿过第一后齿条过孔;第二后齿条位于第二后齿条连接部中,第二导向销的端部嵌入第二后齿条的第二后滑动槽中,第二后齿条穿过第二后齿条过孔;第三后齿条位于第三后齿条连接部中,第三导向销的端部嵌入第三后齿条的第三后滑动槽中,第三后齿条穿过第三后齿条过孔;后圆圈型支撑架设有第一过孔、第二过孔、第三过孔,第一后齿条的前部、第二后齿条的前部、第三后齿条的前部分别穿过后圆圈型支撑架的第一过孔、第二过孔、第三过孔。
12、优选地,前支撑吸附定位装置包括第一前外侧滑动轴、第一前内侧滑动轴、第二前外侧滑动轴、第二前内侧滑动轴、第三前外侧滑动轴、第三前内侧滑动轴,第一前内侧滑动轴与第一前齿条过孔转动连接,第二前内侧滑动轴与第二前齿条过孔转动连接,第三前内侧滑动轴与第三前齿条过孔转动连接,第一前齿条的后部与第一前内侧滑动轴接触,第二前齿条的后部与第二前内侧滑动轴接触,第三前齿条的后部与第三前内侧滑动轴接触;第一前外侧滑动轴、第二前外侧滑动轴、第三前外侧滑动轴分别与前圆圈型支撑架的第一过孔、第二过孔、第三过孔转动连接,第一前齿条的前部与第一前外侧滑动轴接触,第二前齿条的前部与第二前外侧滑动轴接触,第三前齿条的前部与第三前外侧滑动轴接触;
13、后支撑吸附定位装置包括第一后外侧滑动轴、第二后外侧滑动轴、第三后外侧滑动轴、第一后内侧滑动轴、第二后内侧滑动轴、第三后内侧滑动轴,第一后内侧滑动轴与第一后齿条过孔转动连接,第二后内侧滑动轴与第二后齿条过孔转动连接,第三后内侧滑动轴与第三后齿条过孔转动连接,第一后齿条的后部与第一后内侧滑动轴接触,第二后齿条的后部与第二后内侧滑动轴接触,第三后齿条的后部与第三后内侧滑动轴接触;第一后外侧滑动轴、第二后外侧滑动轴、第三后外侧滑动轴分别与后圆圈型支撑架的第一过孔、第二过孔、第三过孔转动连接,第一后齿条的前部与第一后外侧滑动轴接触,第二后齿条的前部与第二后外侧滑动轴接触,第三后齿条的前部与第三后外侧滑动轴接触。
14、优选地,前支撑吸附定位装置还包括前圆珠串,前圆圈型支撑架设有若干个圆珠容纳槽,前圆珠串包括通过线穿起来的若干个圆珠,圆珠卡在圆珠容纳槽中;后支撑吸附定位装置还包括后圆珠串,后圆圈型支撑架设有若干个圆珠容纳槽,后圆珠串包括通过线穿起来的若干个圆珠,后圆珠串额圆珠卡在后圆圈型支撑架的圆珠容纳槽中。
15、本发明的有益效果是,实现了穿越阀门并能够进入容器爬壁的功能,实现了管道-阀门-容器的全链路内部移动、检测,从而不需要解体待检测设备。机器人体积小、质量轻,运动灵活,灵活性高、柔顺性高、活动自由度高,机构简单可靠,适用于不同直径的管道的。
16、本发明软体机器人依靠齿条伸长固定、定位,能够通过柔性本体的伸缩弯扭通过阀门并由携带的摄像头探查容器内部空间。
17、本发明进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
- 还没有人留言评论。精彩留言会获得点赞!