一种距离调节器和调节方法
本发明涉及间距调节,特别是涉及一种用于调节电涡流传感器和被测目标之间的距离的距离调节器和方法。
背景技术:
1、小型低温透平膨胀机是大型低温制冷装置中一种可以实现低温环境的关键部件之一,其主要原理是小型低温透平膨胀机中的转子系统在气体轴承中高速稳定的旋转,带动叶轮高速旋转,制冷工质在高速旋转的叶轮中实现等熵膨胀。因此,转子系统能够在气体轴承内高速稳定的旋转,是小型低温透平膨胀机实现膨胀降温的重要保证。在小型低温透平膨胀机在研制过程中,要研究转子系统在气体轴承中呈现出的转子动力学特性,例如轴心轨迹、振动幅值、转速、二倍频率、低频涡动频率等。
2、在小型低温透平膨胀机的转子动力学特性测量过程中,采用的电涡流传感器系统属于非接触式测量系统,转子的材料是不锈钢金属材料,基于电磁感应原理,当电涡流传感器的探头中金属线圈中通过交变电流时会产生交变磁场,被测的转子处在交变磁场时,同时在转子内产生电流,在被测目标产生的电流在金属体内呈现出旋涡状。所产生电涡流的大小与金属导体的自身几何尺寸、材料特性、线圈激磁电流频率以及线圈与金属体表面的距离等参数呈函数关系。在小型低温透平膨胀机的转子特性测量过程中,电涡流传感器探头处于非接触状态下进行测量工作,此时电涡流传感器的电压值与被测距离呈现单一的线性函数关系,电涡流传感器的特点是灵敏度高、动态性能好,且易于自动采集数据。
3、但是小型低温透平膨胀机的转子在气体轴承中高速稳定的旋转,转子的振动幅值在几十微米范围内,而采用的微距电涡流传感器其探测范围是0~500微米,对应的电压幅值为0~10mv,如果电涡流传感器与被测目标之间的距离太小,则存在碰撞的危险,如果距离太大,又很容易超出探测范围。因此在安装电涡流传感器探头过程中,常常出现安装距离过大或过小的问题,能够将安装距离调节到一个合适的状态往往要付出很大的时间成本。目前并没有一种设备能够满足电涡流传感器探头和转子间距离的调节的要求。
技术实现思路
1、本发明的一目的是,提供一种距离调节器和方法,该距离调节器能够快速、准确、稳定地对电涡流传感器探头与被测转子间的距离进行调节,解决现有的电涡流传感器探头与被测转子间距离难以调节到合适的状态的技术问题。
2、本发明在一方面提供了一种距离调节器,用于调节电涡流传感器和被测目标之间的距离,所述距离调节器包括用于安装在被测目标上的底座和安装在所述底座上的调节模块,所述调节模块包括用于安装在所述底座上的长距滑轨、可滑动地设置在所述长距滑轨上的长距滑块、设置在所述长距滑轨上的差分螺纹器以及可滑动地设置在所述长距滑块上的微距滑块;其中所述微距滑块用于安装电涡流传感器探头,所述差分螺纹器连接于所述微距滑块,所述调节模块通过所述长距滑块相对于所述长距滑轨的移动实现对电涡流传感器探头与被测目标间距离的粗调节,并通过所述差分螺纹器带动所述微距滑块相对于所述长距滑块的移动实现对电涡流传感器探头与被测目标间距离的微调节。
3、在本发明的一实施例中,所述长距滑块上设置有滑轨方向朝向内侧的滑轨,以供所述微距滑块能够沿所述长距滑块滑动;所述长距滑块还设置有用于安装所述差分螺纹器的探针的滑槽。
4、在本发明的一实施例中,所述长距滑轨和所述长距滑块之间的间隙范围为20±1μm,所述微距滑块和所述长距滑块之间的间隙范围为20±1μm。
5、在本发明的一实施例中,所述长距滑轨设置有u形槽,所述长距滑块设置在所述长距滑轨的前端部,所述差分螺纹器设置在所述长距滑轨的后端部并部分位于所述u形槽内。
6、在本发明的一实施例中,所述微距滑块为半圆盘结构;所述微距滑块具有用于安装电涡流传感器探头的第一安装孔和用于安装所述差分螺纹器的探针的第二安装孔,所述调节模块还包括用于固定所述差分螺纹器的探针和所述微距滑块的卡簧。
7、在本发明的一实施例中,所述底座为间隔设置有多个安装孔的圆环状结构,所述长距滑轨通过螺栓安装在所述底座上。
8、在本发明的一实施例中,所述长距滑块的两侧分别设置有一个第一固定件,所述第一固定件用于在所述长距滑块滑动到目标位置时锁定所述长距滑块的位置;所述差分螺纹器通过第二固定件固定在所述长距滑块上;所述微距滑块上设置有第三固定件,所述第三固定件用于在所述微距滑块移动到目标位置时锁定所述微距滑块的位置;所述调节模块还包括用于将电涡流传感器探头固定在所述微距滑块上的两个第四固定件。
9、在本发明的一实施例中,所述第一固定件、所述第二固定件以及所述第三固定件为螺栓或螺钉,所述第四固定件为螺母。
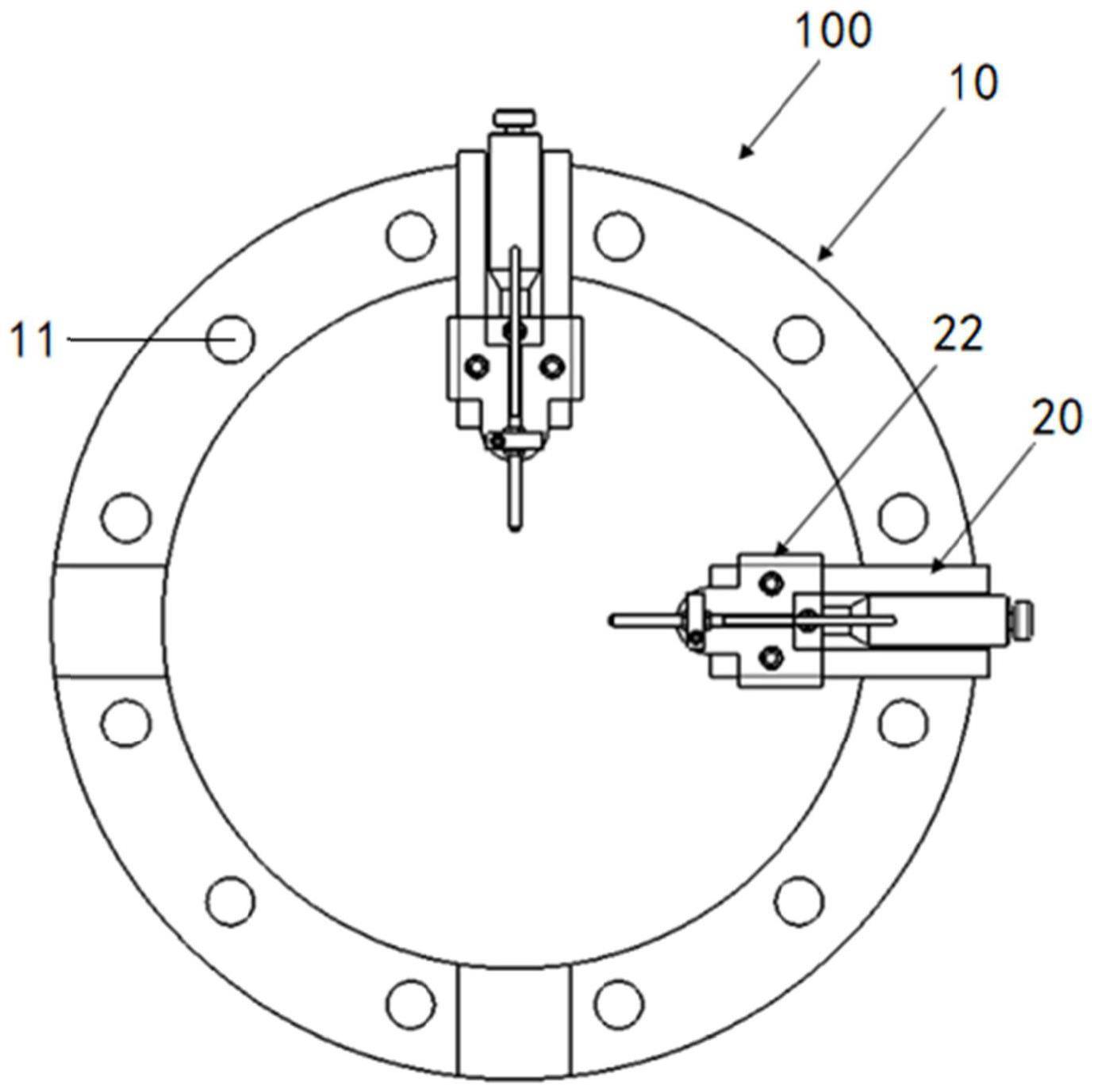
10、在本发明的一实施例中,所述调节模块为两个,两个所述调节模块呈正交状态安装在所述底座上,所述被测目标为透平膨胀机的转子。
11、本发明在另一方面还提供了一种所述距离调节器的调节方法,用于调节电涡流传感器和被测目标之间的距离,包括以下步骤:
12、将调节模块安装在底座上,得到距离调节器;
13、将距离调节器安装在被测目标上;
14、滑动调节模块的长距滑块,使得安装在长距滑块上的电涡流传感器探头接近被测目标;
15、通过第一固定件固定长距滑块的位置;
16、旋转差分螺纹器,使得差分螺纹器的探针推动微距滑块沿长距滑块滑动,从而带动电涡流传感器探头微距移动;
17、直至电涡流传感器探头被移动至与被测目标之间的距离达到目标距离时,通过第三固定件固定所述微距滑块的位置。
18、本发明的主要目的在于设计一种用于调节电涡流传感器的探头与被测目标的距离的距离调节器,第一步通过调节长距滑块可以实现电涡流传感器探头与被测目标之间距离的粗调节,第二步通过调节差分螺纹器可以实现电涡流传感器与被测目标之间距离的微调节,以此通过粗调和微调两个过程,可以快速、准确地将电涡流传感器探头与被测目标之间的距离调节至合适状态,满足电涡流传感器与透平膨胀机的转子的距离调节需求。
19、本发明的所述距离调节器具有拆装方便,调节快速、准确、稳定等优点,而且该距离调节器还可以通过更换不同尺寸的底座,来适用于不同大小的小型低温透平膨胀机,具有通用性广的特点。
20、通过对随后的描述和附图的理解,本发明进一步的目的和优势将得以充分体现。
技术特征:
1.一种距离调节器,其特征在于,用于调节电涡流传感器和被测目标之间的距离,所述距离调节器包括用于安装在被测目标上的底座和安装在所述底座上的调节模块,所述调节模块包括用于安装在所述底座上的长距滑轨、可滑动地设置在所述长距滑轨上的长距滑块、设置在所述长距滑轨上的差分螺纹器以及可滑动地设置在所述长距滑块上的微距滑块;其中所述微距滑块用于安装电涡流传感器探头,所述差分螺纹器连接于所述微距滑块,所述调节模块通过所述长距滑块相对于所述长距滑轨的移动实现对电涡流传感器探头与被测目标间距离的粗调节,并通过所述差分螺纹器带动所述微距滑块相对于所述长距滑块的移动实现对电涡流传感器探头与被测目标间距离的微调节。
2.根据权利要求1所述的距离调节器,其特征在于,所述长距滑块上设置有滑轨方向朝向内侧的滑轨,以供所述微距滑块能够沿所述长距滑块滑动;所述长距滑块还设置有用于安装所述差分螺纹器的探针的滑槽。
3.根据权利要求1所述的距离调节器,其特征在于,所述长距滑轨和所述长距滑块之间的间隙范围为20±1μm,所述微距滑块和所述长距滑块之间的间隙范围为20±1μm。
4.根据权利要求1所述的距离调节器,其特征在于,所述长距滑轨设置有u形槽,所述长距滑块设置在所述长距滑轨的前端部,所述差分螺纹器设置在所述长距滑轨的后端部并部分位于所述u形槽内。
5.根据权利要求1所述的距离调节器,其特征在于,所述微距滑块为半圆盘结构;所述微距滑块具有用于安装电涡流传感器探头的第一安装孔和用于安装所述差分螺纹器的探针的第二安装孔,所述调节模块还包括用于固定所述差分螺纹器的探针和所述微距滑块的卡簧。
6.根据权利要求1所述的距离调节器,其特征在于,所述底座为间隔设置有多个安装孔的圆环状结构,所述长距滑轨通过螺栓安装在所述底座上。
7.根据权利要求1所述的距离调节器,其特征在于,所述长距滑块的两侧分别设置有一个第一固定件,所述第一固定件用于在所述长距滑块滑动到目标位置时锁定所述长距滑块的位置;所述差分螺纹器通过第二固定件固定在所述长距滑块上;所述微距滑块上设置有第三固定件,所述第三固定件用于在所述微距滑块移动到目标位置时锁定所述微距滑块的位置;所述调节模块还包括用于将电涡流传感器探头固定在所述微距滑块上的两个第四固定件。
8.根据权利要求7所述的距离调节器,其特征在于,所述第一固定件、所述第二固定件以及所述第三固定件为螺栓或螺钉,所述第四固定件为螺母。
9.根据权利要求1至8中任一项所述的距离调节器,其特征在于,所述调节模块为两个,两个所述调节模块呈正交状态安装在所述底座上,所述被测目标为透平膨胀机的转子。
10.一种根据权利要求1至9中任一项所述的距离调节器的调节方法,其特征在于,用于调节电涡流传感器和被测目标之间的距离,包括以下步骤:
技术总结
本发明涉及一种距离调节器和调节方法,该距离调节器用于调节电涡流传感器和被测目标之间的距离,包括底座和安装在底座上的调节模块,调节模块包括长距滑块、可滑动地设置在长距滑轨上的长距滑块、设置在长距滑轨上的差分螺纹器以及可滑动地设置在长距滑块上的微距滑块;本发明第一步通过调节长距滑块可以实现电涡流传感器探头与被测目标之间距离的粗调节,第二步通过调节差分螺纹器可以实现电涡流传感器与被测目标之间距离的微调节,以此通过粗调和微调两个过程,可以快速、准确、稳定地将电涡流传感器探头与被测目标之间的距离调节至合适状态,满足电涡流传感器与透平膨胀机的转子的距离调节需求。
技术研发人员:张晓华,柯长磊,李空荣,董斌,彭楠
受保护的技术使用者:中国科学院理化技术研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!