一种用于深海管道探索的自适应折展机器人
本发明涉及机器人,特别涉及一种用于深海管道探索的自适应折展机器人。
背景技术:
1、深海管道的维护和检修对于石油、天然气等资源的开采和输送至关重要,但由于深海环境恶劣,水压巨大、温度低、光线匮乏,人类难以直接进入管道内部进行作业,因此,机器人技术成为了解决这一问题的主要手段。
2、管道机器人在实际的应用中,管线的内壁通常会存在凹陷和凸起,管线的管道也会存在变径管的线下,要求管道机器人具有适应不同管径的功能,但现有的管道机器人变径的柔顺性还不够理想,具体表现为,现有的机器人的变径通过机械脚朝管壁的径向方向的直接伸缩实现,但机械脚伸缩的支持力容易对管壁的涂层或管壁的结构造成损坏,从而影响管道的安全性和完整性,如果机器人适应管径的伸缩为切向伸缩,因其过程较为缓慢和柔顺,所以并不容易破坏管壁的涂层或管壁的结构,是较为理想的柔顺伸缩方式。
3、因此,研究一种可根据管径大小自适应伸缩且可切向柔顺变径的管道机器人具有重要意义。
技术实现思路
1、本发明的目的在于提供一种用于深海管道探索的自适应折展机器人,以解决现有可伸缩的管道机器人无法柔顺变径的问题。
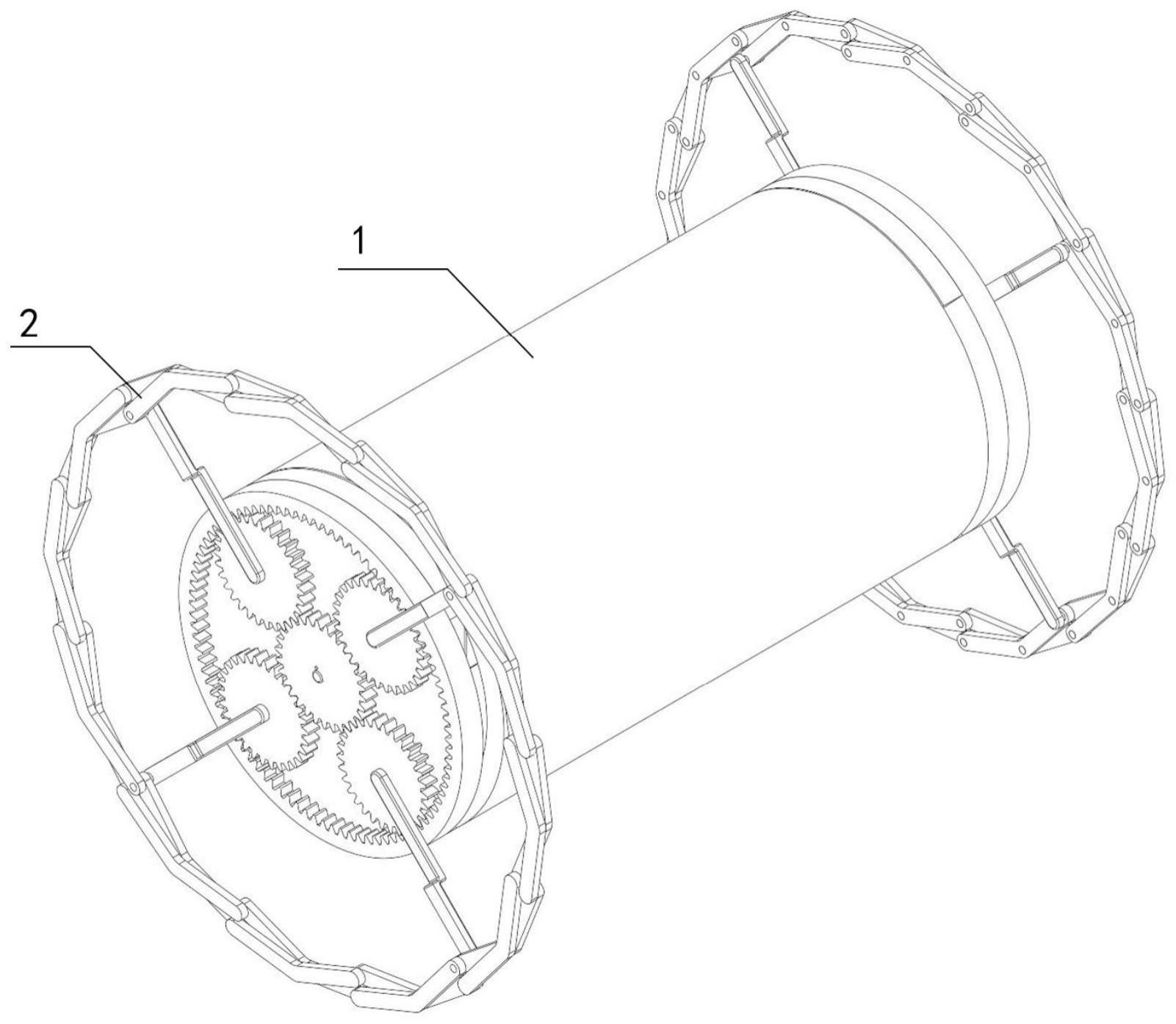
2、为了解决上述技术问题,本发明提供了一种用于深海管道探索的自适应折展机器人,包括机体和折展机构;所述机体的两侧均设有所述折展机构,沿同一轴线方向上,多个所述折展机构与所述机体滑动连接;所述折展机构包括行星齿轮组和连杆单元;所述行星齿轮组均与多个所述连杆单元转动连接,多个所述连杆单元绕所述行星齿轮组周向布置,相邻的所述连杆单元转动连接以形成环状结构;所述行星齿轮组用于控制多个所述连杆单元可选择性转动,以带动所述环状结构折叠收缩或展开扩大。
3、在其中一个实施例中,所述行星齿轮组包括行星传动电机、主动齿轮、从动齿轮和齿轮环;所述行星传动电机与所述主动齿轮传动连接,所述主动齿轮置于所述齿轮环内,所述主动齿轮与所述齿轮环间啮合连接有多个所述从动齿轮,多个所述从动齿轮均转动连接有所述连杆单元。
4、在其中一个实施例中,所述连杆单元为可折展的结构,所述行星齿轮组用于带动多个所述连杆单元转动以收缩或展开。
5、在其中一个实施例中,所述连杆单元包括主动连杆、可转动的第一从动连杆和可转动的第二从动连杆,所述第一从动连杆与所述第二从动连杆转动连接形成有菱形结构;所述第一从动连杆与第一连接杆的一端转动连接,所述第一连接杆的另一端与相邻的所述第二从动连杆转动连接;所述第二从动连杆与第二连接杆的一端转动连接,所述第二连接杆的另一端与相邻的所述第一从动连杆转动连接;所述第一连接杆与所述第二连接杆转动连接;所述第一从动连杆与所述主动连杆转动连接,所述主动连杆与所述从动齿轮转动连接,所述主动连杆用于在所述从动齿轮的转动下带动所述菱形结构收缩或展开。
6、在其中一个实施例中,所述主动连杆包括第一主动杆体和第二主动杆体;所述第一主动杆体的一端与所述第一从动连杆转动连接,所述第一主动杆体的另一端与所述第二主动杆体的一端错位连接,所述第二主动杆体的另一端与所述从动齿轮转动连接。
7、在其中一个实施例中,所述第二主动杆体远离所述第一从动连杆的端部设有转动孔,所述从动齿轮的轴线上固接有轴棒;所述从动齿轮与所述第二主动杆体的转动连接配置为将所述转动孔套设于所述轴线棒上。
8、在其中一个实施例中,所述第一从动连杆和所述第二从动连杆均由v形连杆转动连接组成。
9、在其中一个实施例中,所述第一从动连杆包括第一v形杆体和第二v形杆体,所述第一v形杆体的v形朝向和所述第二v形杆体的v形朝向均对准所述行星齿轮组;所述第一v形杆体的一端与所述第二v形杆体的一端转动连接;所述第一v形杆体的另一端与所述第一连接杆的一端转动连接,所述第一连接杆的另一端与相邻的所述第二从动连杆转动连接;所述第二v形杆体的另一端与所述第一连接杆的一端转动连接,所述第一连接杆的另一端与相邻的所述第二从动连杆转动连接;所述第一v形杆体与同一所述连杆单元的所述第二从动连杆转动连接,所述第二v形杆体与同一所述连杆单元的所述第二从动连杆转动连接;同一所述第一从动连杆的所述第一v形杆体与所述第二v形杆体的连接处与所述行星齿轮组转动连接。
10、在其中一个实施例中,所述第二从动连杆包括第三v形杆体和第四v形杆体,所述第三v形杆体的v形朝向和所述第四v形杆体的v形朝向均对准所述行星齿轮组;所述第三v形杆体的一端与所述第四v形杆体的一端转动连接;所述第三v形杆体的另一端与所述第二连接杆的一端转动连接,所述第二连接杆的另一端与相邻的所述第一从动连杆转动连接;所述第四v形杆体的另一端与所述第二连接杆的一端转动连接,所述第二连接杆的另一端与相邻的所述第一从动连杆转动连接;所述第三v形杆体与同一所述连杆单元的所述第一从动连杆转动连接,所述第四v形杆体与同一所述连杆单元的所述第一从动连杆转动连接。
11、在其中一个实施例中,所述机体内设有滑动电机;所述折展机构连接有齿条;所述齿条与所述滑动电机啮合连接,所述滑动电机用于控制所述折展机构移近或移远所述机体。
12、本发明的有益效果如下:
13、由于所述机体的两侧均设有所述折展机构,沿同一轴线方向上,多个所述折展机构与所述机体滑动连接,所以在进行应用时,所述折展机构可沿机体的轴线方向进行滑动,即可沿管道的水平径向方向进行滑动,以适应管道的水平径向长度,控制两所述折展机构滑动靠近管道的内壁,随后控制折展机构进行切向柔顺伸缩,直至抵接管道的内壁,避免折展机构直接对管壁径向伸缩,从而避免伸缩造成的支持力对管壁的破坏。
14、并且由于所述折展机构包括行星齿轮组和连杆单元;所述行星齿轮组均与多个所述连杆单元转动连接,多个所述连杆单元绕所述行星齿轮组周向布置,相邻的所述连杆单元转动连接以形成环状结构;所述行星齿轮组用于控制多个所述连杆单元可选择性转动,以带动所述环状结构折叠收缩或展开扩大,所以在进行应用时,所述折展机构可通过所述行星齿轮组的可选择性转动,带动所述连杆单元组成的环状结构的收缩或扩大,使其可沿管道的径向方向进行切向的转动伸缩,即整个环状结构的收缩或扩大均是通过缓慢加载的切向转动实现的,可有效避免机械脚伸缩时的直接径向伸缩力对管壁涂层或管壁结构造成损坏,并且亦可适应管道的径向长度。
15、综上所述,通过所述机体与所述折展机构的滑动连接,配合所述折展机构本身的所述行星齿轮组和所述连杆单元的转动配合,使机器人可切向转动伸缩,实现柔顺的、缓慢的管径适应,彻底解决现有可伸缩的管道机器人无法柔顺变径的问题。
技术特征:
1.一种用于深海管道探索的自适应折展机器人,其特征在于,
2.根据权利要求1所述的自适应折展机器人,其特征在于,
3.根据权利要求2所述的自适应折展机器人,其特征在于,所述连杆单元为可折展的结构,所述行星齿轮组用于带动多个所述连杆单元转动以收缩或展开。
4.根据权利要求3所述的自适应折展机器人,其特征在于,
5.根据权利要求4所述的自适应折展机器人,其特征在于,
6.根据权利要求5所述的自适应折展机器人,其特征在于,
7.根据权利要求4所述的自适应折展机器人,其特征在于,
8.根据权利要求7所述的自适应折展机器人,其特征在于,
9.根据权利要求7所述的自适应折展机器人,其特征在于,
10.根据权利要求1所述的自适应折展机器人,其特征在于,
技术总结
本发明涉及机器人技术领域,特别公开了一种用于深海管道探索的自适应折展机器人,包括机体和折展机构;机体的两侧均设有折展机构,沿同一轴线方向上,多个折展机构与机体滑动连接;折展机构包括行星齿轮组和连杆单元;行星齿轮组均与多个连杆单元转动连接,多个连杆单元绕行星齿轮组周向布置,相邻的连杆单元转动连接以形成环状结构;行星齿轮组用于控制多个连杆单元可选择性转动,以带动环状结构折叠收缩或展开扩大;通过机体与折展机构的滑动连接,配合折展机构本身的行星齿轮组和连杆单元的转动配合,使机器人可切向转动伸缩,实现柔顺的、缓慢的管径适应,彻底解决现有可伸缩的管道机器人无法柔顺变径的问题。
技术研发人员:吴嘉宁,姜伟,廖采莹,张捷,陈欣欣,黄荻崴,魏蒋坤
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!