医生控制台的显示器角度调节机构及微创手术机器人的制作方法
本发明涉及医疗设备,尤其涉及一种医生控制台的显示器角度调节机构及微创手术机器人。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。常见的微创手术机器人由医生控制台、患者侧手推车和显示设备组成,外科医生在医生控制台操作输入装置,并将输入传给与远程操作的外科器械连接的患者侧手推车。但是,由于每个医生的身高、坐姿习惯等均有所不同,而微创手术机器人又是公用设备,会由不同的医生去使用,因此固定式的显示器会无法达到最佳视角,不能满足人机交互的观察习惯,从而影响使用的舒适性。
2、针对上述情况,公布号为cn115778557a公开了一种腹腔镜手术系统控制台及其传动控制方法,其包括:底盘、立柱、扶手和头显以及头显转动组件;其中的头显转动组件包括头显固定座、头显转动动力装置和头显转动杆,所述头显固定座固定在所述头显升降组件上,所述头显转动动力装置安装在所述头显固定座上,所述头显转动杆分别与所述头显转动动力装置和头显连接。所述头显转动杆为双摇杆机构。
3、对于上述腹腔镜手术系统控制台来说,由于头显实际的重量达几十公斤,针对几十公斤的头显来说,单靠双摇杆机构来支撑头显,一方面存在对于双摇杆机构的强度要求很高,并且在长期的使用过程中,容易因承重疲劳而出现损坏的现象。另一方面,要通过双摇杆机构来带动头显转动,可能存在由于双摇杆机构的支撑平衡性不佳的情况而影响头显使用状态的稳定性。因此,就目前现有技术公开的腹腔镜手术系统控制台来说,其整体操作性能以及使用的稳定性有待进一步提高。
技术实现思路
1、本发明的第一目的是提供一种医生控制台的显示器角度调节机构,以解决提高医生控制台的显示器角度调节过程的稳定性的技术问题。
2、本发明的第二目的是提供一种微创手术机器人,以解决提高医生控制台的显示器角度调节过程的稳定性的。
3、本发明的医生控制台的显示器角度调节机构是这样实现的:
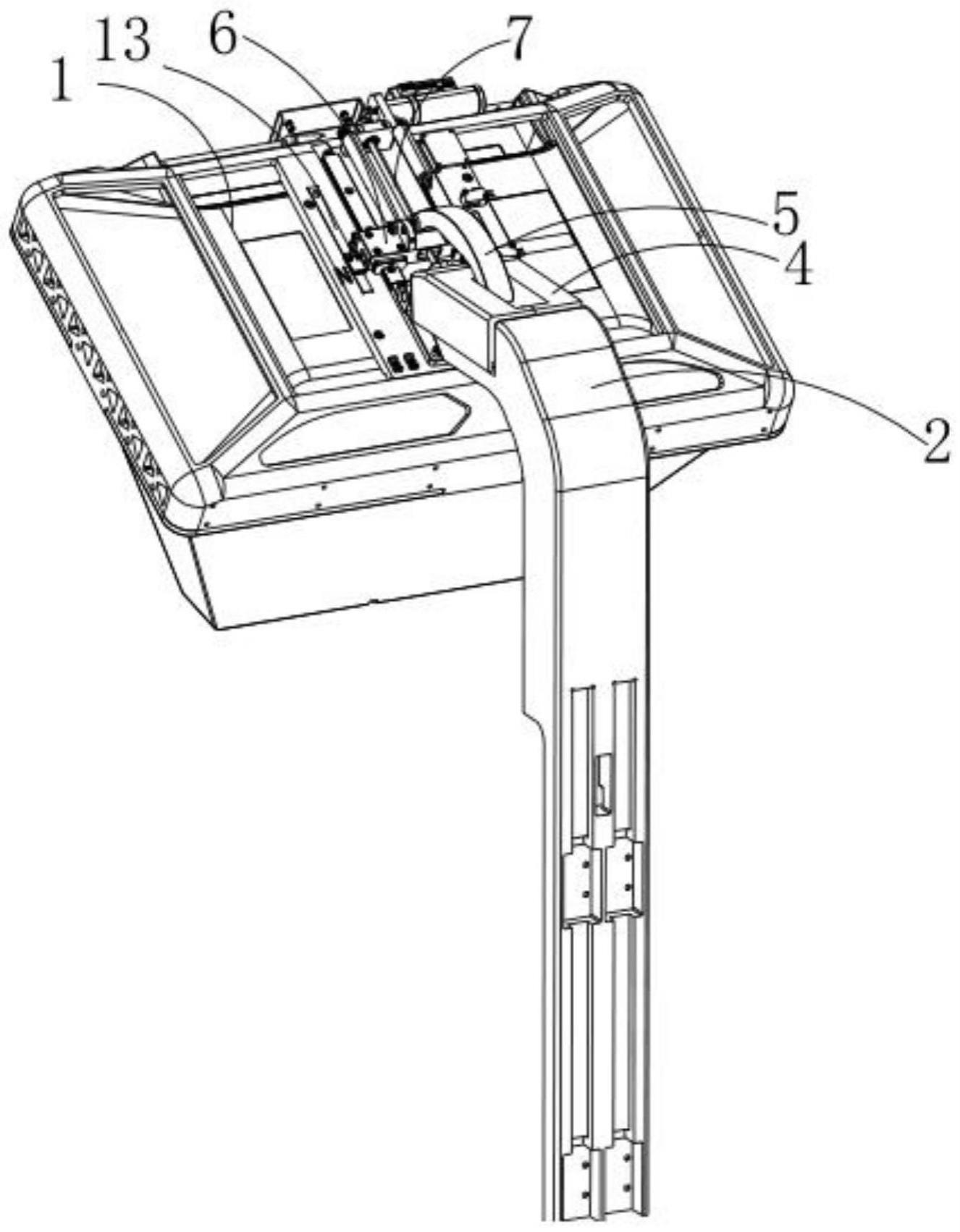
4、一种医生控制台的显示器角度调节机构,包括:支撑立柱、与支撑立柱转动配合的显示器,以及在所述支撑立柱与显示器之间设有的用于调节支撑立柱与显示器的配合角度的驱动结构;其中
5、所述驱动结构包括一端与支撑立柱活动连接的活动联杆、与活动联杆的另一端相连的活动块,以及设于显示器上的用于驱动活动块做直线往复运动的直线运动模组;
6、当所述活动块在显示器中朝着远离支撑立柱一侧运动时,所述显示器相对于支撑立柱做上仰运动;以及
7、当所述活动块在显示器中朝着靠近支撑立柱一侧运动时,所述显示器相对于支撑立柱做下俯运动。
8、在本发明可选的实施例中,所述直线运动模组包括与所述活动块相连的螺母、与所述螺母配接的丝杆,以及连接丝杆以驱动丝杆旋转的驱动结构。
9、在本发明可选的实施例中,所述驱动结构包括与丝杆固连的传动齿轮、与所述传动齿轮啮合的主动齿轮,以及与所述主动齿轮相连的电机。
10、在本发明可选的实施例中,所述活动块与显示器之间还设有沿平行于活动块直线运动方向分布的至少一条滑轨;以及
11、所述活动块与滑轨滑动配合。
12、在本发明可选的实施例中,所述显示器上还间隔设有两个用于感应活动块的位置的行程限位开关。
13、在本发明可选的实施例中,在所述显示器上沿活动块的滑动轨迹还设有一磁条;以及
14、在所述显示器上设有适于与磁条配合使用的感应头。
15、在本发明可选的实施例中,所述显示器上沿活动块的运动方向设有至少一对弹性拉伸件,且至少一对所述弹性拉伸件的一端与活动块相连。
16、在本发明可选的实施例中,所述显示器与支撑立柱之间通过枢转连接组配合以实现支撑立柱与显示器的活动连接;以及
17、所述枢转连接组包括固设在显示器上的连接座和与连接座转动配合的连接块;其中
18、所述连接块一体成形在支撑立柱上,或所述连接块与支撑立柱配接相连。
19、在本发明可选的实施例中,所述活动联杆采用c型结构体。
20、本发明的微创手术机器人是这样实现的:
21、一种微创手术机器人,包括:所述的医生控制台的显示器角度调节机构。
22、采用了上述技术方案,本发明具有以下的有益效果:本发明的医生控制台的显示器角度调节机构及微创手术机器人,首先,通过活动联杆分别与显示器和支撑立柱之间的活动连接,再协同连接活动联杆的活动块在显示器上的直线运动以及活动件与固定件之间的枢转配合,即在显示器与支撑立柱之间既有两者之间的直接连接关系,又有通过活动联杆形成的显示器与支撑立柱的间接连接关系,对于重量较重的控制台来说,一方面可以确保对于显示器的有效支撑以用于提高显示器使用状态的稳定性,从而提高支撑立柱与显示器调节配合角度过程中的平衡性。另一方面,还可以有效保证显示器与支撑立柱之间的连接强度,防止因长期的承重疲劳而出现损坏的现象。
23、再者,采用直线运动模组,通过丝杆带动活动块,活动块带动活动联杆移动,达到调节显示器角度的目的,机械传导力大,更加稳定稳固,不易损坏。
24、此外,通过在显示器与活动块之间设有的弹性拉伸件作为重力平衡结构,能够平衡微创手术机器人的医生控制台的显示器的重量,便于实现医生控制台的显示器的俯仰角度的调节,提高了操作的便捷性。
技术特征:
1.一种医生控制台的显示器角度调节机构,其特征在于,包括:支撑立柱、与支撑立柱转动配合的显示器,以及在所述支撑立柱与显示器之间设有的用于调节支撑立柱与显示器的配合角度的驱动结构;其中
2.根据权利要求1所述的医生控制台的显示器角度调节机构,其特征在于,所述直线运动模组包括与所述活动块相连的螺母、与所述螺母配接的丝杆,以及连接丝杆以驱动丝杆旋转的驱动结构。
3.根据权利要求2所述的医生控制台的显示器角度调节机构,其特征在于,所述驱动结构包括与丝杆固连的传动齿轮、与所述传动齿轮啮合的主动齿轮,以及与所述主动齿轮相连的电机。
4.根据权利要求1~3任一项所述的医生控制台的显示器角度调节机构,其特征在于,所述活动块与显示器之间还设有沿平行于活动块直线运动方向分布的至少一条滑轨;以及
5.根据权利要求1所述的医生控制台的显示器角度调节机构,其特征在于,所述显示器上还间隔设有两个用于感应活动块的位置的行程限位开关。
6.根据权利要求1~3或5任一项所述的医生控制台的显示器角度调节机构,其特征在于,在所述显示器上沿活动块的滑动轨迹还设有一磁条;以及
7.根据权利要求1所述的医生控制台的显示器角度调节机构,其特征在于,所述显示器上沿活动块的运动方向设有至少一对弹性拉伸件,且至少一对所述弹性拉伸件的一端与活动块相连。
8.根据权利要求1~3、5或7任一项所述的医生控制台的显示器角度调节机构,其特征在于,所述显示器与支撑立柱之间通过枢转连接组配合以实现支撑立柱与显示器的活动连接;以及
9.根据权利要求1所述的医生控制台的显示器角度调节机构,其特征在于,所述活动联杆采用c型结构体。
10.一种微创手术机器人,其特征在于,包括:如权利要求1~9任一项所述的医生控制台的显示器角度调节机构。
技术总结
本发明公开了一种医生控制台的显示器角度调节机构及微创手术机器人,包括:支撑立柱、与支撑立柱转动配合的控制台,以及在支撑立柱与控制台之间设有的用于调节支撑立柱与控制台的配合角度的驱动结构;其中驱动结构包括一端与支撑立柱活动连接的活动联杆、与活动联杆的另一端相连的活动块,以及设于控制台上的用于驱动活动块做直线往复运动的直线运动模组;当活动块在控制台中朝着远离支撑立柱一侧运动时,控制台相对于支撑立柱做上仰运动;以及当活动块在控制台中朝着靠近支撑立柱一侧运动时,控制台相对于支撑立柱做下俯运动。本发明可以确保对于显示器的有效支撑,从而提高支撑立柱与显示器调节配合角度过程中的平衡性。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!