一种AMT挡位判定方法、装置、车辆及存储介质与流程
本发明涉及车辆,尤其涉及一种amt挡位判定方法、装置、车辆及存储介质。
背景技术:
1、由于选换挡执行机构设计原因,选挡气缸和换挡气缸的两个腔室的截面积不同,导致活塞两侧受力不同,这也导致了同时关闭与选挡气缸或换挡气缸连接的两个电磁阀时,会导致气缸的活塞杆位置漂移的情况,影响摘空完成及选挡完成条件的判断。并且活塞杆发生位置漂移后,会造成多次摘挡情况的发生,造成了换挡时间变长,影响动力性。同时电磁阀频繁开关,一定程度上影响了电磁阀寿命。更为严重的是,当发生位置漂移后,当前挡位判定为空的位置可能进入在挡挡位,在电机倒拖发动机等特殊工况下,存在扭矩时,车辆会非预期动作,导致事故发生。
技术实现思路
1、本发明的目的在于:提供一种amt挡位判定方法、装置、车辆及存储介质,以解决现有技术中在电机倒拖发动机等特殊工况下选换挡执行机构发生位置漂移后,车辆会非预期动作,导致事故发生的问题。
2、第一方面,本发明提供一种amt挡位判定方法,amt包括输入轴、输出轴,与所述输入轴连接的滑套,以及与所述输出轴连接的齿圈,所述输入轴用于与电机连接,所述滑套通过气缸驱动能够与所述齿圈啮合或分离,所述气缸的两个腔室分别通过挂挡电磁阀和摘挡电磁阀连接气源;依据所述滑套的移动范围依次划分为空挡带、区间带和在挡带,当所述滑套位于所述空挡带时,所述滑套与齿圈分离,当所述滑套位于所述在挡带时,所述滑套与所述齿圈结合;所述amt挡位判定方法包括:
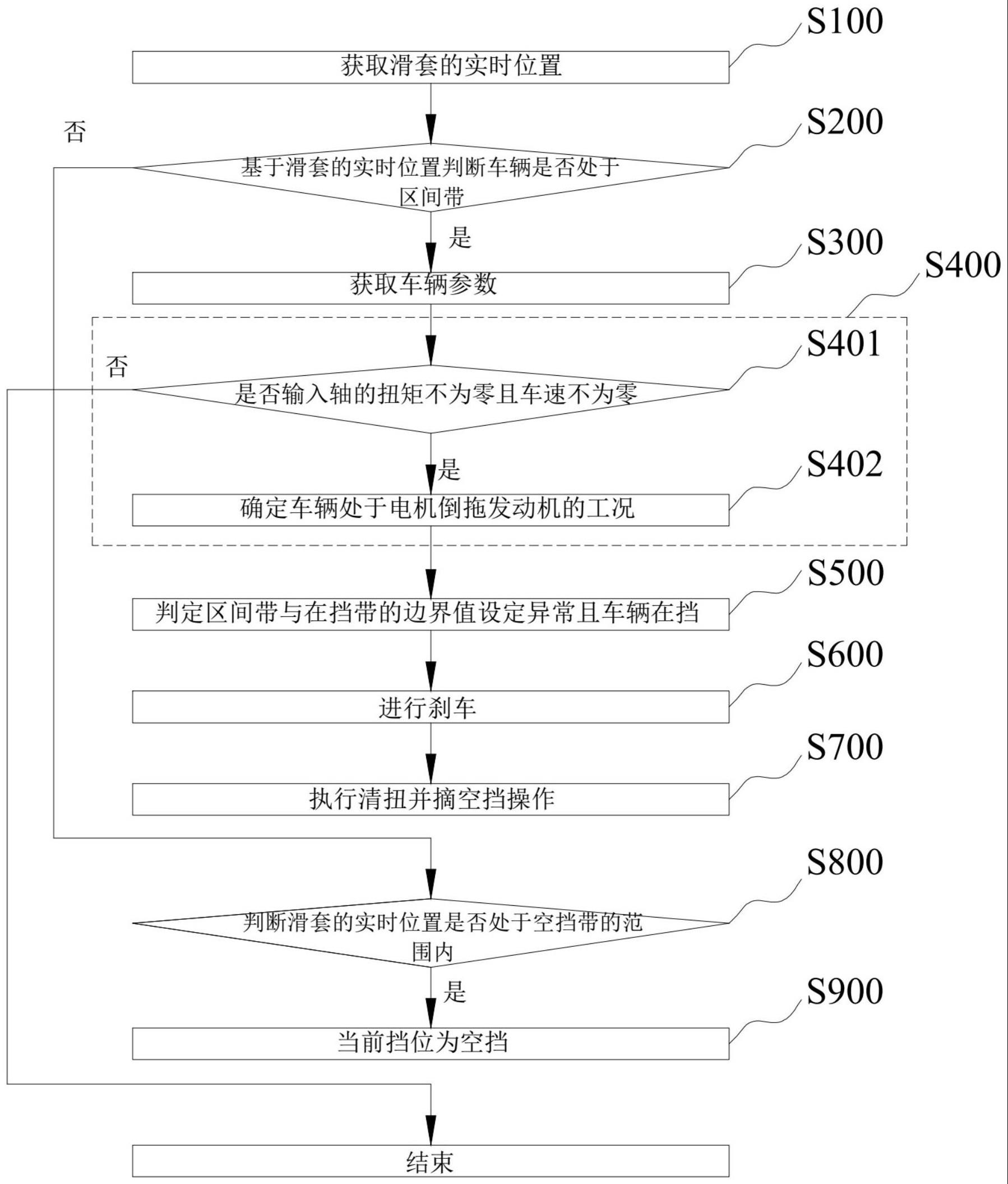
3、获取滑套的实时位置;
4、基于所述滑套的实时位置判断车辆是否处于所述区间带;
5、若是,则获取车辆参数,所述车辆参数包括输入轴的扭矩和车速;
6、基于所述车辆参数确定所述车辆处于电机倒拖发动机的工况;
7、判定所述区间带与所述在挡带的边界值设定异常且所述车辆在挡;
8、进行刹车;
9、执行清扭并摘空挡操作。
10、作为amt挡位判定方法的优选技术方案,基于所述车辆参数确定所述车辆处于电机倒拖发动机的工况包括:
11、判断是否所述输入轴的扭矩不为零且所述车速不为零;
12、若是,则确定所述车辆处于电机倒拖发动机的工况;若否,则结束。
13、作为amt挡位判定方法的优选技术方案,基于所述滑套的实时位置判断车辆是否处于所述区间带时;若否,则判断所述滑套的实时位置是否处于所述空挡带的范围内;
14、若是,则确认当前挡位为空挡。
15、作为amt挡位判定方法的优选技术方案,执行清扭并摘空挡操作:
16、所述电机开始进行清扭,同时摘挡电磁阀开始使能,并开始累计所述摘挡电磁阀的持续使能时间;
17、获取所述电机的扭矩;
18、当所述电机的扭矩等于零时,判断所述持续使能时间是否超过设定使能时间;
19、若否,则结束。
20、作为amt挡位判定方法的优选技术方案,判断所述持续使能时间是否超过设定使能时间时,若是,则所述摘挡电磁阀持续使能设定时长后将所述摘挡电磁阀关闭;
21、获取滑套的实时位置;
22、基于所述滑套的实时位置判断所述滑套是否位于所述空挡带;
23、若是,则确认摘空挡成功;
24、当前挡位为空挡。
25、作为amt挡位判定方法的优选技术方案,当
26、基于所述滑套的实时位置判断所述滑套是否位于所述空挡带时,若否,则报出故障。
27、作为amt挡位判定方法的优选技术方案,在执行清扭并摘空挡操作的过程中,记录所述滑套与所述齿圈刚刚分离时的位置,并据此更新所述区间带和所述在挡带的边界值。
28、第二方面,本发明提供一种amt挡位判定装置,amt包括输入轴、输出轴,与所述输入轴连接的滑套,以及与所述输出轴连接的齿圈,所述输入轴用于与电机连接,所述滑套通过气缸驱动能够与所述齿圈啮合或分离,所述气缸的两个腔室分别通过挂挡电磁阀和摘挡电磁阀连接气源;依据所述滑套的移动范围依次划分为空挡带、区间带和在挡带,当所述滑套位于所述空挡带时,所述滑套与齿圈分离,当所述滑套位于所述在挡带时,所述滑套与所述齿圈结合;包括:
29、位置获取模块,用于获取滑套的实时位置;
30、区间带判定模块,用于基于所述滑套的实时位置判断车辆是否处于所述区间带;
31、车辆参数获取模块,用于获取车辆参数,所述车辆参数包括输入轴的扭矩和车速;
32、工况确定模块,用于基于所述车辆参数确定所述车辆处于电机倒拖发动机的工况;
33、在挡确定模块,用于确定所述区间带与所述在挡带的边界值设定异常且所述车辆在挡;
34、刹车执行模块,用于进行刹车;
35、清扭及摘空挡执行模块,用于执行清扭并摘空挡操作。
36、第三方面,本发明提供一种车辆,包括amt、发动机、电机,所述电机连接于所述发动机和所述amt之间,所述车辆还包括:
37、行车控制器;
38、扭矩传感器,用于获取输入轴的扭矩,并将获取的所述扭矩发送给所述行车控制器;
39、车速传感器,用于获取车辆的车速,并将获取的所述车速发送给所述行车控制器;
40、位置传感器,用于获取滑套的实时位置,并将获取的所述滑套的实时位置发送给所述行车控制器;
41、存储器,用于存储一个或多个程序;
42、当所述一个或多个程序被所述行车控制器执行时,使得所述行车控制器控制车辆实现任一上述方案中所述的amt挡位判定方法。
43、第四方面,本发明提供一种存储介质,其上存储有计算机程序,该程序被行车控制器执行时车辆实现任一上述方案中所述的amt挡位判定方法。
44、本发明提供的技术方案至少具有以下有益效果:
45、本发明提供一种amt挡位判定方法、装置、车辆及存储介质,该amt挡位判定方法通过获取滑套的实时位置;基于滑套的实时位置判断车辆是否处于区间带;若是,则获取车辆参数,车辆参数包括输入轴的扭矩和车速;基于车辆参数确定车辆处于电机倒拖发动机的工况;判定区间带与在挡带的边界值设定异常且车辆在挡;进行刹车;执行清扭并摘空挡操作。在滑套位于区间带时,通过扭矩和车速判断是否处于电机倒拖发动机的工况,进而可判定车辆是否真实地处于空挡,并识别出区间带与在挡带的边界值设定是否存在异常;另外,当车辆处于电机倒拖发动机的工况且当车辆实际在挡时,通过时刹车和摘空挡,以避免出现危险事故。
技术特征:
1.一种amt挡位判定方法,amt包括输入轴、输出轴,与所述输入轴连接的滑套,以及与所述输出轴连接的齿圈,所述输入轴用于与电机连接,所述滑套通过气缸驱动能够与所述齿圈啮合或分离,所述气缸的两个腔室分别通过挂挡电磁阀和摘挡电磁阀连接气源;依据所述滑套的移动范围依次划分为空挡带、区间带和在挡带,当所述滑套位于所述空挡带时,所述滑套与齿圈分离,当所述滑套位于所述在挡带时,所述滑套与所述齿圈结合;其特征在于,所述amt挡位判定方法包括:
2.根据权利要求1所述的amt挡位判定方法,其特征在于,基于所述车辆参数确定所述车辆处于电机倒拖发动机的工况包括:
3.根据权利要求1所述的amt挡位判定方法,其特征在于,基于所述滑套的实时位置判断车辆是否处于所述区间带时;若否,则判断所述滑套的实时位置是否处于所述空挡带的范围内;
4.根据权利要求1所述的amt挡位判定方法,其特征在于,执行清扭并摘空挡操作:
5.根据权利要求4所述的amt挡位判定方法,其特征在于,判断所述持续使能时间是否超过设定使能时间时,若是,则所述摘挡电磁阀持续使能设定时长后将所述摘挡电磁阀关闭;
6.根据权利要求5所述的amt挡位判定方法,其特征在于,当基于所述滑套的实时位置判断所述滑套是否位于所述空挡带时,若否,则报出故障。
7.根据权利要求1所述的amt挡位判定方法,其特征在于,在执行清扭并摘空挡操作的过程中,记录所述滑套与所述齿圈刚刚分离时的位置,并据此更新所述区间带和所述在挡带的边界值。
8.一种amt挡位判定装置,amt包括输入轴、输出轴,与所述输入轴连接的滑套,以及与所述输出轴连接的齿圈,所述输入轴用于与电机连接,所述滑套通过气缸驱动能够与所述齿圈啮合或分离,所述气缸的两个腔室分别通过挂挡电磁阀和摘挡电磁阀连接气源;依据所述滑套的移动范围依次划分为空挡带、区间带和在挡带,当所述滑套位于所述空挡带时,所述滑套与齿圈分离,当所述滑套位于所述在挡带时,所述滑套与所述齿圈结合;其特征在于,包括:
9.一种车辆,包括amt、发动机、电机,所述电机连接于所述发动机和所述amt之间,其特征在于,所述车辆还包括:
10.一种存储介质,其上存储有计算机程序,其特征在于,该程序被行车控制器执行时车辆实现如权利要求1-7中任一项所述的amt挡位判定方法。
技术总结
本发明涉及车辆技术领域,具体公开了一种AMT挡位判定方法、装置、车辆及存储介质,该AMT挡位判定方法通过获取滑套的实时位置;基于滑套的实时位置判断车辆是否处于区间带;若是,则获取车辆参数,车辆参数包括输入轴的扭矩和车速;基于车辆参数确定车辆处于电机倒拖发动机的工况;判定区间带与在挡带的边界值设定异常且车辆在挡;进行刹车;执行清扭并摘空挡操作。在滑套位于区间带时,通过扭矩和车速判断是否处于电机倒拖发动机的工况,进而可判定车辆是否真实地处于空挡,并识别出区间带与在挡带的边界值设定是否存在异常;另外,当车辆处于电机倒拖发动机的工况且当车辆实际在挡时,通过时刹车和摘空挡,以避免出现危险事故。
技术研发人员:赵国强
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!