一种新型管网机器人
本发明主要涉及官网机器人的,具体涉及一种新型管网机器人。
背景技术:
1、管道机器人是一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统。
2、根据申请号为cn202111088457.9的专利文献所提供的一种地下管网用无线管道机器人可知,该管道机器人包括前壳体,前壳体后侧连接有后壳体,前壳体外周均布有三组移动前轮结构,后壳体外周均布有三组驱动后轮结构,前壳体、后壳体内共同安装有径向伸缩驱动结构,后壳体内安装有与驱动后轮结构相配合的移动驱动机构,前壳体内安装有前伸缩安装机构,前伸缩安装机构上安装有检测摄像装置。该本发明中,通过径向伸缩驱动结构能够使得前滚轮、后滚轮同时沿径向进行伸缩,且在前伸缩安装机构、伸缩气缸的作用下,检测摄像装置、后壳体均可沿轴向进行伸缩,从而在投放或不使用时,可将本发明体积调节至最小状态,便于投放、携带、收藏,且该发明可以适用于不同管径的地下管道,从而扩大了本发明的适用性。
3、上述发明在投放或不使用时,可将本发明体积调节至最小状态,便于投放,但传统的管网机器人中用于伸缩轮体的结构复杂,且伸缩杆推动轮体的方式,导致为杆体的安装需要预设足够的空间,从而影响管体内机器人的投放。
技术实现思路
1、本发明主要提供了一种新型管网机器人用以解决上述背景技术中提出的技术问题。
2、本发明解决上述技术问题采用的技术方案为:
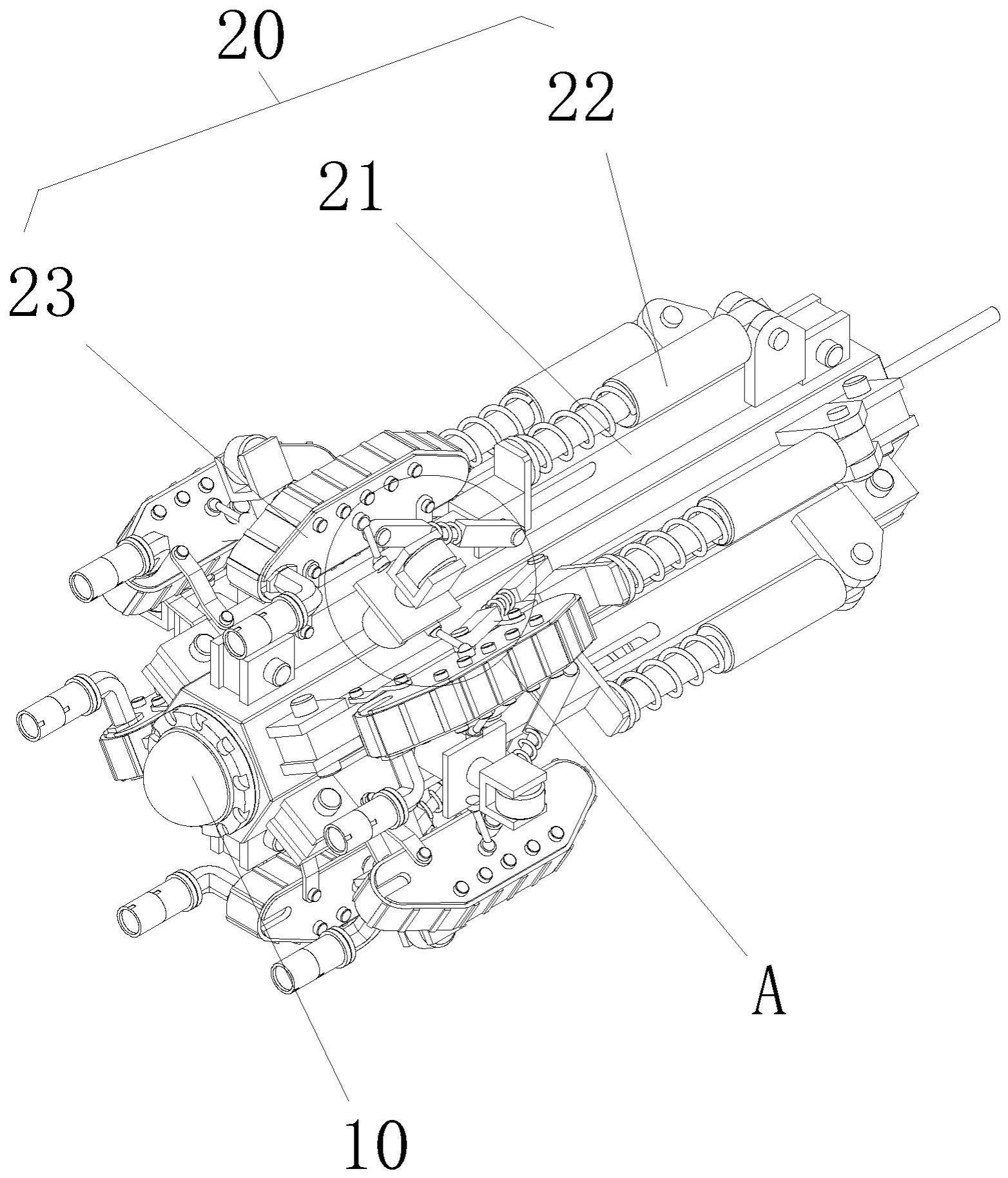
3、一种新型管网机器人,包括多目视觉传感器,所述多目视觉传感器的外部连接有多个可变径驱动机构,多个所述可变径驱动机构环绕所述多目视觉传感器设置;
4、所述可变径驱动机构包括安装于所述多目视觉传感器外表面的导轨,连接于所述导轨一端的动力组件,以及连接于所述导轨另一端的移动组件,所述移动组件的驱动端与所述动力组件的执行端相连接;
5、所述移动组件包括通过转轴与所述导轨的两侧表面连接有第一连杆,两个所述第一连杆之间通过转轴转动连接有吸盘履带,所述吸盘履带远离所述第一连杆的一端两侧通过转轴转动连接有第二连杆,所述第二连杆远离所述吸盘履带的一端通过转轴与所述导轨转动连接。
6、进一步的,所述动力组件包括安装于所述导轨远离所述第一连杆的一端顶部的转轴座,通过转轴与所述转轴座转动连接的电动推杆,以及与所述电动推杆远离所述转轴座的一端相连接的滑块,所述滑块与所述导轨滑动连接,所述滑块的两侧表面通过转轴转动连接有伸缩连杆,所述伸缩连杆远离所述滑块的一端通过转轴与所述吸盘履带转动连接,在本发明中,通过滑块推动伸缩连杆,以通过伸缩连杆推动与其杆体相连接的吸盘履带,以使吸盘履带能够靠近或远离管体内壁,以使吸盘履带能够贴向不同管径的管体,使得管网机器人能够对不同管径的管体进行检测。
7、进一步的,所述导轨的壳体上设有导向长孔,所述导向长孔的孔体内滑动连接有辊轴,所述辊轴安装于所述滑块的内部,在本发明中,通过滑块的稳定滑动,从而利用滑块稳定推动伸缩连杆。
8、进一步的,所述电动推杆靠近所述滑块的一端外部套设有第一弹簧,在本发明中,通过第一弹簧的蓄能,从而为电动推杆中输出的杆体提供支撑,从而为电动推杆的伸缩提供稳定地支撑,以使电动推杆能够有力地推动滑块。
9、进一步的,所述伸缩连杆包括通过转轴与所述滑块相连接的第一连杆臂,安装于所述第一连杆臂远离所述滑块的一侧表面的导向杆,以及套设于所述导向杆外表面的第二连杆臂,所述第二连杆臂远离所述导向杆的一端通过转轴与相邻所述吸盘履带转动连接,在本发明中,通过第二连杆臂在第一连杆臂上导向杆的伸缩,从而为吸盘履带遇到障碍物时,提供足够的空间进行缓冲,以使吸盘履带能够顺利通过管体内的障碍物。
10、进一步的,所述伸缩连杆还包括套设于所述导向杆外表面的第二弹簧,所述第二弹簧的两端分别与所述第一连杆臂和第二连杆臂相抵接,在本发明中,通过第二弹簧的蓄能,以为第二连杆臂提供支撑,从而通过第二连杆臂为吸盘履带提供稳定地支撑。
11、进一步的,所述吸盘履带的一侧表面安装有支撑杆,所述支撑杆远离所述吸盘履带的一侧表面连接有监测摄像头,在本发明中,由于监测摄像头跟随吸盘履带移动,以使监测摄像头能够跟随吸盘履带靠近管体内壁。
12、进一步的,两个所述吸盘履带之间通过弹性支撑部件相连接,所述弹性支撑部件包括安装于两个所述吸盘履带相互靠近的一侧表面的第一球关节,所述第一球关节远离所述吸盘履带的一端通过转轴转动连接有连接杆,两个所述连接杆之间连接有支撑板,在本发明中,利用弹簧伸缩杆推动万向轮进一步靠近管体内壁,以通过万向轮与管体内壁之间的接触,从而为机器人提供支撑。
13、进一步的,所述支撑板的壳体上穿插有弹簧伸缩杆,所述弹簧伸缩杆的一端连接有万向轮。
14、进一步的,所述连接杆与相邻所述支撑板之间通过第二球关节相连接,在本发明中,通过第一球关节和第二球关节的设置,以扩大与第一球关节和第二球关节相连接的连接杆的活动范围,使得连接杆能够适应吸盘履带的移动,而保持对支撑板的支撑。
15、与现有技术相比,本发明的有益效果为:
16、其一,本发明能够在动力组件占用纵向空间较小的情况下,快速推动吸盘履带接触管体内壁,以便于对管网的检测,具体为:通过导轨为转轴座提供支撑,通过转轴座为电动推杆提供支撑,通过电动推杆推动滑块,以使滑块在导轨上沿直线进行滑动,通过滑块推动伸缩连杆,以通过伸缩连杆推动与其杆体相连接的吸盘履带,以使吸盘履带能够靠近或远离管体内壁,以使吸盘履带能够贴向不同管径的管体。
17、其二,本发明在吸盘履带避让管体内部的障碍物和缺陷时,吸盘履带靠近多目视觉传感器,在此过程中,通过多目视觉传感器推动连接杆,通过连接杆推动支撑板,以使支撑板上的弹簧伸缩杆能够靠近管体内壁,从而利用弹簧伸缩杆推动万向轮进一步靠近管体内壁,以通过万向轮与管体内壁之间的接触,从而为机器人提供支撑。
18、以下将结合附图与具体的实施例对本发明进行详细的解释说明。
技术特征:
1.一种新型管网机器人,包括多目视觉传感器(10),其特征在于,所述多目视觉传感器(10)的外部连接有多个可变径驱动机构(20),多个所述可变径驱动机构(20)环绕所述多目视觉传感器(10)设置;
2.根据权利要求1所述的一种新型管网机器人,其特征在于,所述动力组件(22)包括安装于所述导轨(21)远离所述第一连杆(231)的一端顶部的转轴座(221),通过转轴与所述转轴座(221)转动连接的电动推杆(222),以及与所述电动推杆(222)远离所述转轴座(221)的一端相连接的滑块(223),所述滑块(223)与所述导轨(21)滑动连接,所述滑块(223)的两侧表面通过转轴转动连接有伸缩连杆(224),所述伸缩连杆(224)远离所述滑块(223)的一端通过转轴与所述吸盘履带(232)转动连接。
3.根据权利要求2所述的一种新型管网机器人,其特征在于,所述导轨(21)的壳体上设有导向长孔(211),所述导向长孔(211)的孔体内滑动连接有辊轴(212),所述辊轴(212)安装于所述滑块(223)的内部。
4.根据权利要求2所述的一种新型管网机器人,其特征在于,所述电动推杆(222)靠近所述滑块(223)的一端外部套设有第一弹簧(2221)。
5.根据权利要求2所述的一种新型管网机器人,其特征在于,所述伸缩连杆(224)包括通过转轴与所述滑块(223)相连接的第一连杆臂(2241),安装于所述第一连杆臂(2241)远离所述滑块(223)的一侧表面的导向杆(2242),以及套设于所述导向杆(2242)外表面的第二连杆臂(2243),所述第二连杆臂(2243)远离所述导向杆(2242)的一端通过转轴与相邻所述吸盘履带(232)转动连接。
6.根据权利要求5所述的一种新型管网机器人,其特征在于,所述伸缩连杆(224)还包括套设于所述导向杆(2242)外表面的第二弹簧(2244),所述第二弹簧(2244)的两端分别与所述第一连杆臂(2241)和第二连杆臂(2243)相抵接。
7.根据权利要求1所述的一种新型管网机器人,其特征在于,所述吸盘履带(232)的一侧表面安装有支撑杆(2321),所述支撑杆(2321)远离所述吸盘履带(232)的一侧表面连接有监测摄像头(2322)。
8.根据权利要求1所述的一种新型管网机器人,其特征在于,两个所述吸盘履带(232)之间通过弹性支撑部件(234)相连接,所述弹性支撑部件(234)包括安装于两个所述吸盘履带(232)相互靠近的一侧表面的第一球关节(2341),所述第一球关节(2341)远离所述吸盘履带(232)的一端通过转轴转动连接有连接杆(2342),两个所述连接杆(2342)之间连接有支撑板(2343)。
9.根据权利要求8所述的一种新型管网机器人,其特征在于,所述支撑板(2343)的壳体上穿插有弹簧伸缩杆(2344),所述弹簧伸缩杆(2344)的一端连接有万向轮(2345)。
10.根据权利要求8所述的一种新型管网机器人,其特征在于,所述连接杆(2342)与相邻所述支撑板(2343)之间通过第二球关节(2346)相连接。
技术总结
本发明提供了一种新型管网机器人,包括多目视觉传感器,所述多目视觉传感器的外部连接有多个可变径驱动机构,多个所述可变径驱动机构环绕所述多目视觉传感器设置;所述可变径驱动机构包括安装于所述多目视觉传感器外表面的导轨,连接于所述导轨一端的动力组件,以及连接于所述导轨另一端的移动组件,所述移动组件的驱动端与所述动力组件的执行端相连接;所述移动组件包括通过转轴与所述导轨的两侧表面连接有第一连杆,两个所述第一连杆之间通过转轴转动连接有吸盘履带,所述吸盘履带远离所述第一连杆的一端两侧通过转轴转动连接有第二连杆。本发明能够在动力组件占用纵向空间较小的情况下,快速推动吸盘履带接触管体内壁,以便于对管网的检测。
技术研发人员:丁伟
受保护的技术使用者:安徽信息工程学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!