新型差速器及其控制方法与流程
本发明涉及轮式车辆领域,尤其涉及一种新型差速器及其控制方法。
背景技术:
1、目前轮式底盘车辆通常采用的驱动车桥形式是动力输入到差速器,差速器将动力分配到左右两侧车轮,在转弯过程中差速器起到自动调节车辆两侧车轮轮速的作用,差速器是为了调整左右轮的转速差而装置的。为了驱动左右两个车轮,必须将左右两个车轮连接起来,如果将2个车轮机械连接在一起,汽车在曲线行驶的时候就不能以相同的速度旋转,为了能让汽车曲线行驶旋转速度基本一致性,这时需要加入差速器用以调整左右轮的转速差。汽车差速器主要是消除汽车在转弯时左右轮转速不一致而造成的机械干涉现象,如果没有差速器,就会因左右轮转速不一致而导致机械性损坏,在一般的人力三轮车在转弯时因为没有安装差速器设备,因此只能采用单边驱动。
2、差速器伴随汽车行业发展多年,这种结构成熟稳定,适应性较好,被绝大多数轮式车辆所使用。但是前轮转向结构在新能源电动汽车、无人驾驶和机器人领域使用的最大困难就是存在一个较大转弯半径,转弯半径造成这种底盘不能原地旋转,限制了它在狭小空间的使用,而且对无人驾驶导航的路径规划和运动控制要求很高。
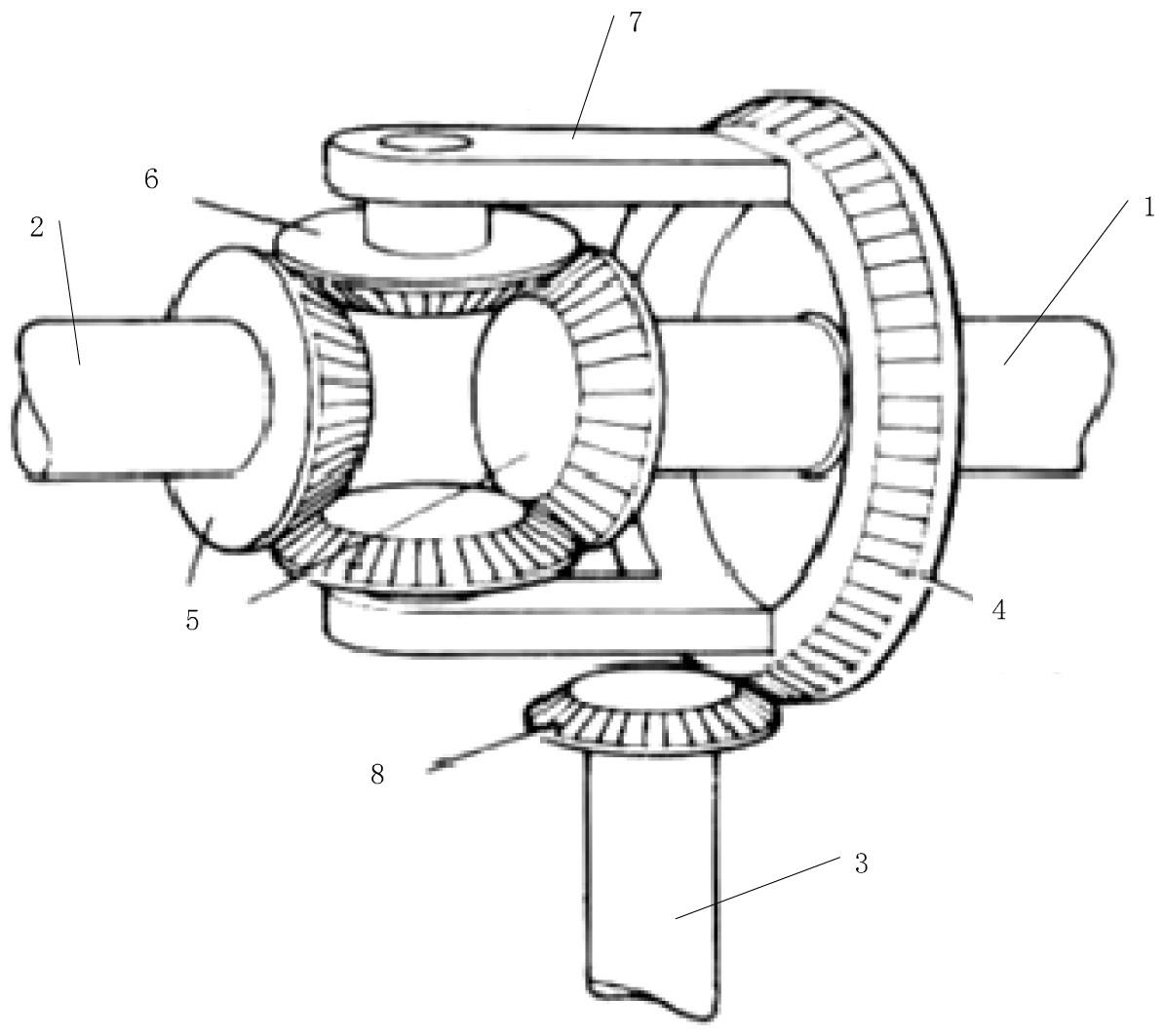
3、请参照图1~图2,传统差速器由行星齿轮、行星轮架(差速器壳)、左右两条输出轴、太阳齿轮等零件组成。发动机的动力经输入轴进入差速器,直接驱动行星轮架,再由行星轮带动左、右两条输出轴,分别驱动左、右车轮。当汽车直行时,左、右车轮与行星轮架三者的转速相等处于平衡状态,而在汽车转弯时三者平衡状态被破坏,导致内侧轮转速减小,外侧轮转速增加。
技术实现思路
1、本发明实施例所要解决的技术问题在于,提供一种新型差速器及其控制方法,以提升车辆在不良路况的通过性以及实现原地旋转。
2、为了解决上述技术问题,本发明实施例提出了一种新型差速器,包括第一输出轴、第二输出轴、输入轴,第一输出轴上设有可转动的第一从动齿轮,第一从动齿轮上设有框架,框架上装有行星齿轮组,第一输出轴、第二输出轴末端上均设有与行星齿轮组相啮合的太阳齿轮,所述差速器还包括换向机构和驱动第二输出轴转动的传动副,输入轴上设有可转动的第一主动轮,第一主动轮和第一从动齿轮啮合,换向机构将输入轴动力传递到第一主动轮和/或传动副上。
3、进一步地,所述传动副包括可转动的设于输入轴上的第二主动轮以及固连在第二输出轴上的第二从动齿轮,第二主动轮与第二从动齿轮啮合。
4、进一步地,换向机构包括拨叉以及设于输入轴上的同步器;拨叉拨动差速器,将输入轴动力传递到第一主动轮和/或第二主动轮上。
5、进一步地,所述拨叉拨动差速器将输入轴动力传递到第二主动轮上时,拨叉锁止第一主动轮。
6、进一步地,同步器设于第一主动轮和第二主动轮之间,第一主动轮和第二主动轮上均设有插槽,同步器两端均设有对应的插销。
7、进一步地,同步器中部设有环形槽,拨叉的一端位于环形槽中,拨叉另一端对应设有用于锁止第一主动轮的锁止销。
8、进一步地,第一从动齿轮和第二从动齿轮规格相同,第一主动轮和第二主动轮规格相同。
9、进一步地,所述换向机构由多个离合器组成。
10、相应地,本发明实施例还提供了一种新型差速器的控制方法,包括:
11、正常模式步骤:驱动拨叉位于朝第一主动轮的一侧,拨叉拨动同步器连接第一主动轮,并将输入轴的动力传递给第一主动轮,第二主动轮处于空转状态;
12、锁定模式步骤:驱动拨叉位于中间位置,拨叉拨动同步器至第一主动轮和第二主动轮中间,同步器两端分别连接第一主动轮和第二主动轮,并将输入轴的动力传递给第一主动轮和第二主动轮,第一输出轴和第二输出轴转速相同;
13、反转模式步骤:驱动拨叉位于朝第二主动轮的一侧并锁定第一主动轮,拨叉拨动同步器连接第二主动轮,第一输出轴和第二输出轴转向相反输出。
14、本发明的有益效果为:发明具有三种工作模式:1,正常差速器工作模式,和现有的普通差速器没有差别;2,差速锁模式,锁定左右车轮轮速,能够使车辆通过不良路况;3,反转模式,可以使左右车轮转动方向相反,实现车辆的原地转向,这样就可以使车辆更加灵活,应用更加广泛,尤其适合新能源电动车,轮式机器人底盘,无人驾驶轮式车辆等对控制要求更加灵活的产品应用。
技术特征:
1.一种新型差速器,包括第一输出轴(1)、第二输出轴(2)、输入轴(3),第一输出轴(1)上设有可转动的第一从动齿轮(4),第一从动齿轮(4)上设有框架(7),框架(7)上装有行星齿轮组(6),第一输出轴(1)、第二输出轴(2)末端上均设有与行星齿轮组(6)相啮合的太阳齿轮(5),其特征在于,所述差速器还包括换向机构和驱动第二输出轴(2)转动的传动副,输入轴(3)上设有可转动的第一主动轮(8),第一主动轮(8)和第一从动齿轮(4)啮合,换向机构将输入轴(3)动力传递到第一主动轮(8)和/或传动副上。
2.如权利要求1所述的新型差速器,其特征在于,所述传动副包括可转动的设于输入轴(3)上的第二主动轮(9)以及固连在第二输出轴(2)上的第二从动齿轮(10),第二主动轮(9)与第二从动齿轮(10)啮合。
3.如权利要求2所述的新型差速器,其特征在于,换向机构包括拨叉(11)以及设于输入轴(3)上的同步器(12);拨叉(11)拨动差速器,将输入轴(3)动力传递到第一主动轮(8)和/或第二主动轮(9)上。
4.如权利要求3所述的新型差速器,其特征在于,所述拨叉(11)拨动差速器将输入轴(3)动力传递到第二主动轮(9)上时,拨叉(11)锁止第一主动轮(8)。
5.如权利要求4所述的新型差速器,其特征在于,同步器(12)设于第一主动轮(8)和第二主动轮(9)之间,第一主动轮(8)和第二主动轮(9)上均设有插槽(17),同步器(12)两端均设有对应的插销(13)。
6.如权利要求5所述的新型差速器,其特征在于,同步器(12)中部设有环形槽(14),拨叉(11)的一端位于环形槽(14)中,拨叉(11)另一端对应设有用于锁止第一主动轮(8)的锁止销(15)。
7.如权利要求2所述的新型差速器,其特征在于,第一从动齿轮(4)和第二从动齿轮(10)规格相同,第一主动轮(8)和第二主动轮(9)规格相同。
8.如权利要求1所述的新型差速器,其特征在于,所述换向机构由多个离合器组成。
9.一种新型差速器的控制方法,其特征在于,包括:
技术总结
本发明实施例公开了一种新型差速器及其控制方法,所述差速器包括第一输出轴、第二输出轴、输入轴,第一输出轴上设有可转动的第一从动齿轮,第一从动齿轮上设有框架,框架上装有行星齿轮组,第一输出轴、第二输出轴末端上均设有与行星齿轮组相啮合的太阳齿轮,所述差速器还包括换向机构和驱动第二输出轴转动的传动副,输入轴上设有可转动的第一主动轮,第一主动轮和第一从动齿轮啮合,换向机构将输入轴动力传递到第一主动轮和/或传动副上。本发明能够使车辆通过不良路况;可以使左右车轮转动方向相反,实现车辆的原地转向。
技术研发人员:左睿,周伟,成明轩
受保护的技术使用者:深圳市先发智能有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!