一种四自由度径向振动抑制策略
本发明涉及一种四自由度径向振动抑制策略,属于四自由度悬浮系统控制。
背景技术:
1、随着电机功率的逐渐增长,传统机械轴承将不再适用于用高速、大功率电机应用场合,将导致轴承磨损严重。基于此,取消原有机械轴承,并通过在原有转轴上增加两个径向磁轴承,使得传统电机具备四自由度悬浮能力。然而,传统四自由度悬浮系统仅能抑制磁轴承处振动力,而无法消除电机处的振动,采用无轴承电机技术,在电机定子内增加一套悬浮绕组,使得电机同样具备径向力控制功能,从而进一步减小系统振动。
2、然而,当电机、两个径向磁轴承均具备径向力主动控制功能后,三者径向力间的协调问题则尤为重要。若控制不当,则容易出现机壳振动加剧的现象,同时也增加系统的结构应力,不利于悬浮系统的稳定运行。因此,如何减小转轴的振动成为一个亟待解决的问题。
技术实现思路
1、本发明旨在提出一种四自由度径向振动抑制策略,采用无轴承电机、两个径向磁轴承的径向力协调控制方法,从而减小甚至消除系统结构振动。
2、本发明为解决上述技术问题采用以下技术方案:
3、一种四自由度径向振动抑制策略,应用于一种四自由度悬浮系统,所述一种四自由度悬浮系统包括无轴承电机、第一径向磁轴承、第二径向磁轴承、第一振动加速度传感器与第二振动加速度传感器,所述第一振动加速度传感器和所述第二振动加速度传感器放置在所述无轴承电机的机壳上,包括,
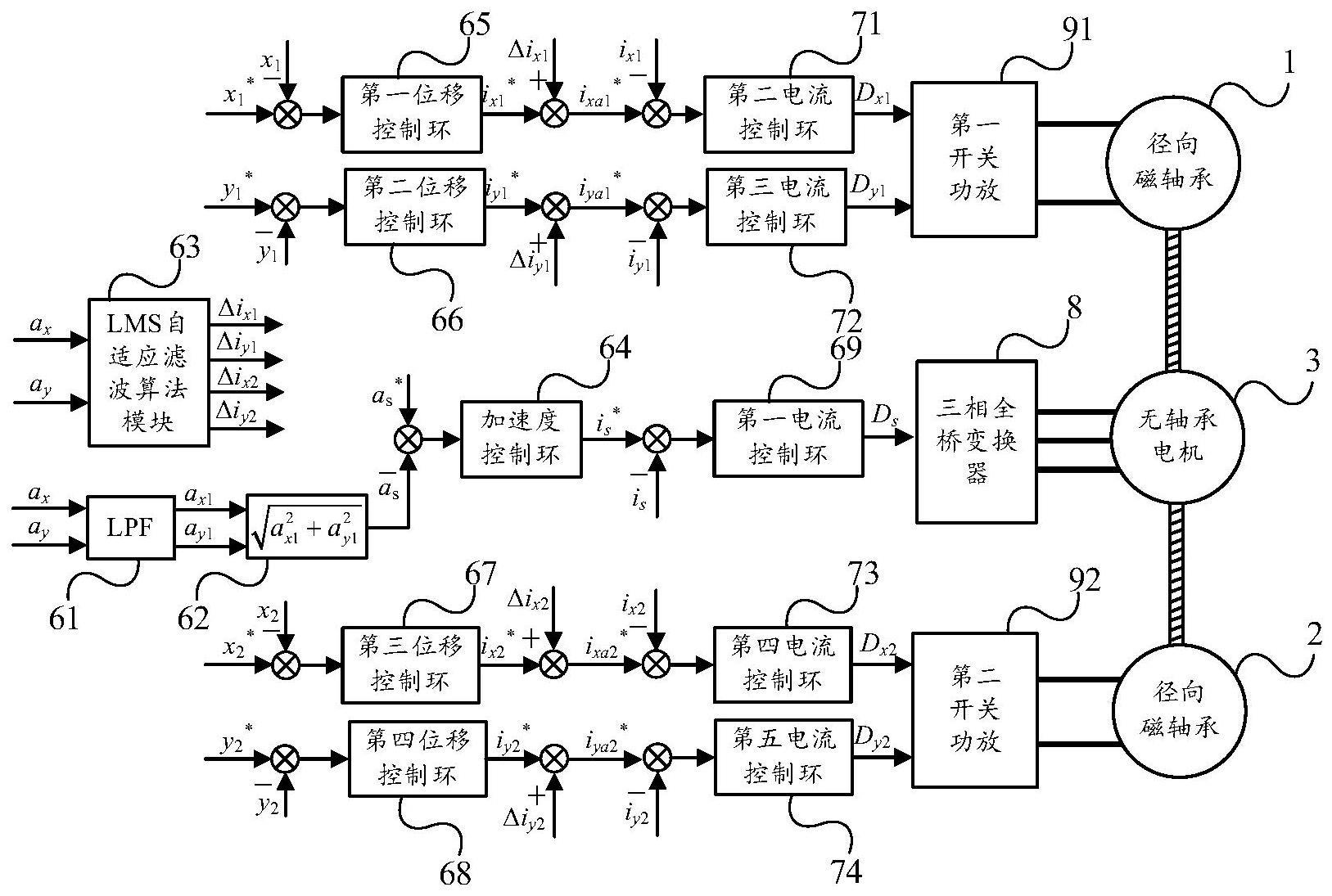
4、步骤s1,所述第一振动加速度传感器和所述第二振动加速度传感器实时采集所述无轴承电机的机壳的振动加速度ax与振动加速度ay,经过低通滤波器后输出振动加速度ax1与振动加速度ay1,并获得合成振动加速度as;
5、步骤s2,根据机壳的振动力分布特性,将所述振动加速度ax、所述振动加速度ay采用lms自适应滤波算法估算得到第一径向磁轴承、第二径向磁轴承处的振动力,进而获得第一径向磁轴承x方向补偿电流δix1、第一径向磁轴承y方向补偿电流δiy1、第二径向磁轴承x方向补偿电流δix2、第二径向磁轴承y方向补偿电流δiy2;
6、步骤s3,将第一径向磁轴承x方向位移反馈信号x1与第一径向磁轴承x方向给定位移信号x1*作差,经过第一位移控制环输出第一径向磁轴承x方向初始给定电流ix1*;将第一径向磁轴承y方向位移反馈信号y1与第一径向磁轴承y方向给定位移信号y1*作差,经过第二位移控制环输出第一径向磁轴承y方向初始给定电流iy1*;将第二径向磁轴承x方向位移反馈信号x2与第二径向磁轴承x方向给定位移信号x2*作差,经过第三位移控制环输出第二径向磁轴承x方向初始给定电流ix2*;将第二径向磁轴承y方向位移反馈信号y2与第二径向磁轴承y方向给定位移信号y2*作差,经过第四位移控制环输出第二径向磁轴承y方向初始给定电流iy2*;
7、步骤s4,将所述合成振动加速度as与给定加速度as*作差,经过加速度控制环获得无轴承电机的悬浮绕组给定电流is*;同时,将所述第一径向磁轴承x方向补偿电流δix1与所述第一径向磁轴承x方向初始给定电流ix1*作运算获得第一径向磁轴承x方向实际控制给定电流ixa1*;将所述第一径向磁轴承y方向补偿电流δiy1与所述第一径向磁轴承y方向初始给定电流iy1*作运算获得第一径向磁轴承y方向实际控制给定电流iya1*;将所述第二径向磁轴承x方向补偿电流δix2与所述第二径向磁轴承x方向初始给定电流ix2*作运算获得第二径向磁轴承x方向实际控制给定电流ixa2*;将所述第二径向磁轴承y方向补偿电流δiy2与所述第二径向磁轴承y方向初始给定电流iy2*作运算获得第二径向磁轴承y方向实际控制给定电流iya2*;
8、步骤s5,将无轴承电机的悬浮绕组给定电流is*与反馈电流is作差经过第一电流控制环输出三相全桥变换器开关管的占空比ds,通过三相全桥变换器控制无轴承电机;同时,将所述第一径向磁轴承x方向实际控制给定电流ixa1*与第一径向磁轴承x方向反馈电流ix1作差经过第二电流控制环输出第一开关功放的第一占空比dx1;将所述第一径向磁轴承y方向实际控制给定电流iya1*与第一径向磁轴承y方向反馈电流iy1作差经过第三电流控制环输出第一开关功放的第二占空比dy1;将所述第二径向磁轴承x方向实际控制给定电流ixa2*与第二径向磁轴承x方向反馈电流ix2作差经过第四电流控制环输出第二开关功放的第一占空比dx2;将所述第二径向磁轴承y方向实际控制给定电流iya2*与第二径向磁轴承y方向反馈电流iy2作差经过第五电流控制环输出第二开关功放的第二占空比dy2;最后分别通过第一开关功放与第二开关功放控制所述第一径向磁轴承与所述第二径向磁轴承。
9、本发明一优选实施例中,所述第一振动加速度传感器和所述第二振动加速度传感器按90°正交放置在所述无轴承电机的机壳上。
10、本发明一优选实施例中,所述加速度控制环采用pi调节器。
11、本发明一优选实施例中,所述第一位移控制环、所述第二位移控制环、所述第三位移控制环、所述第四位移控制环采用pid调节器。
12、本发明一优选实施例中,所述第一电流控制环、所述第二电流控制环、所述第三电流控制环、所述第四电流控制环、所述第五电流控制环采用pi调节器。
13、本发明具有以下有益效果:
14、(1)本发明通过在电机机壳上增加两个90°正交放置的振动加速度传感器,可得到两个正交方向的振动加速度,进而获得转轴的偏心状态。
15、(2)本发明在获得无轴承电机的振动力后,采用lms自适应滤波算法估算得到第一径向磁轴承、第二径向磁轴承处的振动力,省去了径向磁轴承处的振动加速度传感器。
16、(3)本发明通过增加一个振动加速度调节器,得到无轴承电机的悬浮绕组给定电流is*,并进行闭环控制,可有效减小无轴承电机振动。
技术特征:
1.一种四自由度径向振动抑制策略,应用于一种四自由度悬浮系统,其特征在于,所述一种四自由度悬浮系统包括无轴承电机、第一径向磁轴承、第二径向磁轴承、第一振动加速度传感器与第二振动加速度传感器,所述第一振动加速度传感器和所述第二振动加速度传感器放置在所述无轴承电机的机壳上,包括,
2.根据权利要求1所述的一种四自由度径向振动抑制策略,其特征在于,所述第一振动加速度传感器和所述第二振动加速度传感器按90°正交放置在所述无轴承电机的机壳上。
3.根据权利要求1所述的一种四自由度径向振动抑制策略,其特征在于,所述加速度控制环采用pi调节器。
4.根据权利要求1所述的一种四自由度径向振动抑制策略,其特征在于,所述第一位移控制环、所述第二位移控制环、所述第三位移控制环、所述第四位移控制环采用pid调节器。
5.根据权利要求1所述的一种四自由度径向振动抑制策略,其特征在于,所述第一电流控制环、所述第二电流控制环、所述第三电流控制环、所述第四电流控制环、所述第五电流控制环采用pi调节器。
技术总结
本发明公开了一种四自由度径向振动抑制策略,属于四自由度悬浮系统控制技术领域,通过在电机机壳上增加两个90°正交放置的振动加速度传感器,可得到两个正交方向的振动加速度,进而获得转轴的偏心状态,进行后续的控制。本发明所提出的四自由度振动抑制策略仅需安装两个正交放置的振动加速度传感器即可实现闭环控制,具有结构简单,可靠性高的优点;此外,采用无轴承电机、两个径向磁轴承的径向力协调控制方法,使得减振效果更为突出。
技术研发人员:俞强,曹鑫,邓智泉
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!