一种车辆自动换挡方法和相关装置与流程
本技术涉及车辆,特别是涉及一种车辆自动换挡方法和相关装置。
背景技术:
1、随着车辆技术的高速发展,车辆已从单纯的代步工具逐步发展成为电子化、人性化与高度集成化的大型智能体。换挡作为车辆行驶过程中改变车速与行进方向必须的步骤,也在逐渐向着智能化自动换挡的方向发展。
2、相关技术多以通过识别驾驶员换挡意图的方式控制车辆自动换挡,比如针对车速与挡位之间的关系建立模型,通过车速信号识别车速,从而根据识别到的车速与模型实现自动换挡。
3、但是,相关技术中建立的模型功能过于单一,无法针对各种车辆功能场景实现自动换挡,智能化程度较低。
技术实现思路
1、为了解决上述技术问题,本技术提供了一种换挡逻辑建模方法和相关装置。通过新的换挡逻辑模型实现适用于多种功能场景的自动换挡。
2、本技术实施例公开了如下技术方案:
3、第一方面,本技术实施例公开了一种车辆自动换挡方法,所述方法包括:
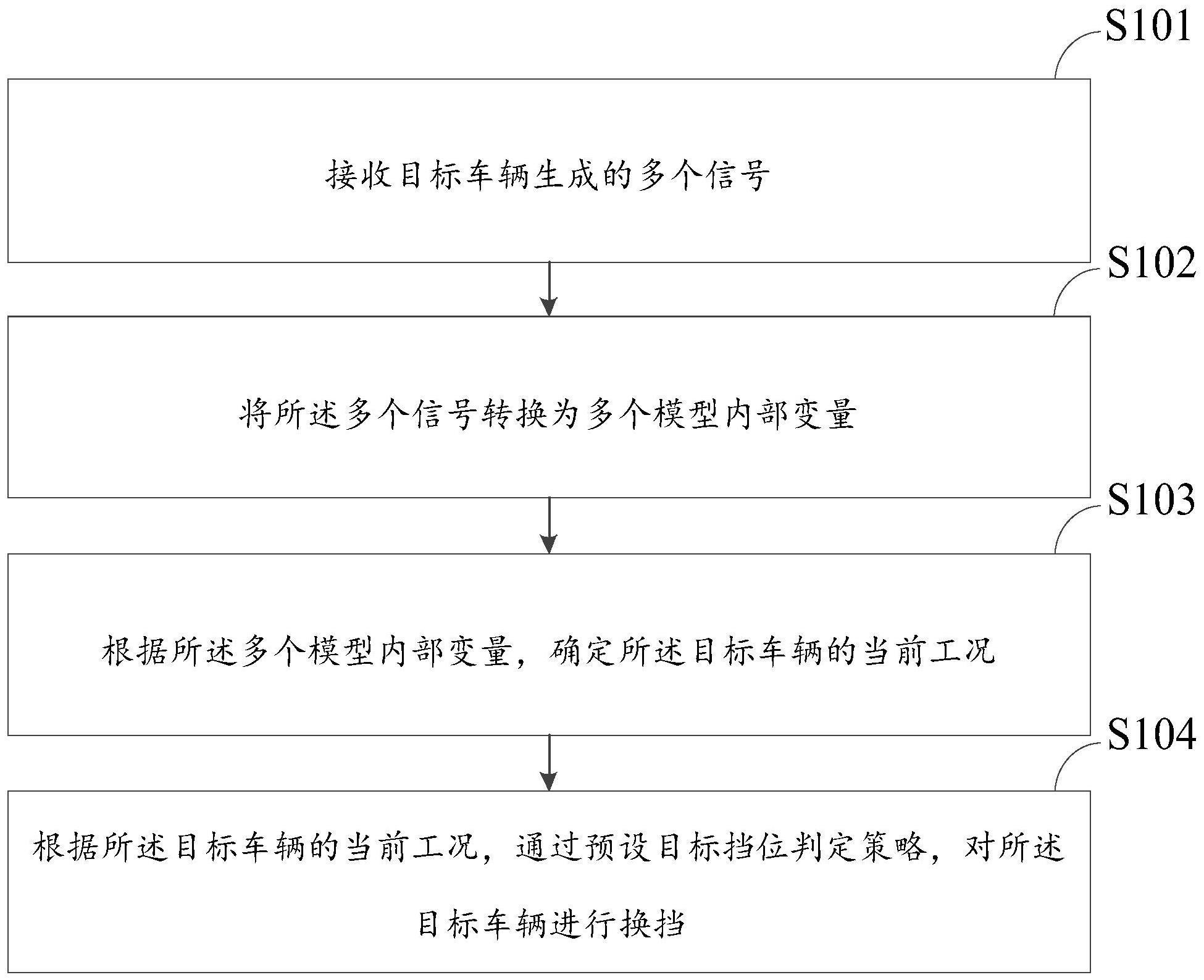
4、接收目标车辆生成的多个信号;
5、将所述多个信号转换为多个模型信号变量;
6、根据所述多个模型信号变量,确定所述目标车辆的当前工况;
7、根据所述目标车辆的当前工况,通过预设目标挡位判定策略,对所述目标车辆进行换挡。
8、可选的,所述多个信号包括制动踏板信号、主驾车门信号与安全带状态信号;
9、所述将所述多个信号转换为多个模型信号变量包括:
10、将所述制动踏板信号、主驾车门信号与安全带状态信号转换为制动踏板变量、主驾车门变量与安全带状态变量;
11、所述根据所述多个模型信号变量,确定所述目标车辆的当前工况包括:
12、若所述制动踏板松开且所述主驾车门松开且所述安全带状态为松开,确定所述目标车辆处于驾驶员离开状态;
13、所述根据所述目标车辆的当前工况,通过预设目标挡位判定策略,对目标车辆进行换挡包括:
14、若所述目标车辆处于驾驶员离开状态,将所述目标车辆换到泊车挡。
15、可选的,在接收目标车辆生成的多个信号之后,所述方法还包括:
16、确定所述多个信号的有效性,获得多个有效信号;
17、所述将所述多个信号转换为多个模型信号变量包括:
18、将所述多个有效信号转换为多个模型信号变量。
19、可选的,在将所述多个信号转换为多个模型信号变量之后,所述方法还包括:
20、根据所述多个模型信号变量确定所述目标车辆的整车状态。
21、可选的,所述方法还包括:
22、根据所述目标车辆的整车状态,确定所述目标车辆的状态限制条件;
23、根据所述状态限制条件,判断所述目标车辆的驾驶员操作是否符合所述状态限制条件;
24、若所述驾驶员操作不符合所述状态限制条件,通过所述目标车辆拒绝所述驾驶员操作。
25、可选的,所述多个信号包括电源模式信号、车速信号与变速箱当前挡位信号;
26、所述将所述多个信号转换为多个模型信号变量包括:
27、将所述电源模式信号、车速信号与变速箱当前挡位信号转换为电源模式变量、车速变量与变速箱当前挡位变量;
28、所述根据所述多个模型信号变量,确定所述目标车辆的当前工况包括:
29、若所述电源模式变量为开且所述车速变量在预设范围内且所述变速箱当前挡位变量非泊车挡,确定所述目标车辆处于空挡状态;
30、所述根据所述目标车辆的当前工况,通过预设目标挡位判定策略,对所述目标车辆进行换挡包括:
31、若所述目标车辆处于空挡状态,将所述目标车辆换到空挡。
32、可选的,所述预设范围为大于或等于1km/h且小于3km/h。
33、第二方面,本技术实施例公开了一种车辆自动换挡装置,所述装置包括:
34、信号接收单元,用于接收目标车辆生成的多个信号;
35、信号转换单元,用于将所述多个信号转换为多个模型信号变量;
36、工况确定单元,用于根据所述多个模型信号变量,确定所述目标车辆的当前工况;
37、换挡单元,用于根据所述目标车辆的当前工况,通过预设目标挡位判定策略,对所述目标车辆进行换挡。
38、可选的,所述多个信号包括制动踏板信号、主驾车门信号与安全带状态信号;
39、所述信号转换单元,还用于:
40、将所述制动踏板信号、主驾车门信号与安全带状态信号转换为制动踏板变量、主驾车门变量与安全带状态变量;
41、所述工况确定单元,还用于:
42、若所述制动踏板松开且所述主驾车门松开且所述安全带状态为松开,确定所述目标车辆处于驾驶员离开状态;
43、所述换挡单元,还用于:
44、若所述目标车辆处于驾驶员离开状态,将所述目标车辆换到泊车挡。
45、可选的,所述装置还包括:
46、有效性确定单元,用于确定所述多个信号的有效性,获得多个有效信号;
47、所述信号转换单元,还用于:
48、将所述多个有效信号转换为多个模型信号变量。
49、可选的,所述装置还包括:
50、整车状态确定单元,用于根据所述多个模型信号变量确定所述目标车辆的整车状态。
51、可选的,所述装置还包括:
52、限制条件确定单元,用于根据所述目标车辆的整车状态,确定所述目标车辆的状态限制条件;
53、操作确定单元,用于根据所述状态限制条件,判断所述目标车辆的驾驶员操作是否符合所述状态限制条件;
54、操作拒绝单元,用于若所述驾驶员操作不符合所述状态限制条件,通过所述目标车辆拒绝所述驾驶员操作。
55、可选的,所述多个信号包括电源模式信号、车速信号与变速箱当前挡位信号;
56、所述信号转换单元,还用于:
57、将所述电源模式信号、车速信号与变速箱当前挡位信号转换为电源模式变量、车速变量与变速箱当前挡位变量;
58、所述工况确定单元,还用于:
59、若所述电源模式变量为开且所述车速变量在预设范围内且所述变速箱当前挡位变量非泊车挡,确定所述目标车辆处于空挡状态;
60、所述换挡单元,还用于:
61、若所述目标车辆处于空挡状态,将所述目标车辆换到空挡。
62、可选的,所述预设范围为大于或等于1km/h且小于3km/h。
63、第三方面,本技术实施例公开了一种计算机设备,所述计算机设备包括处理器以及存储器:
64、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
65、所述处理器用于根据所述程序代码中的指令执行如第一方面及第一方面任一可选项所述的车辆自动换挡方法。
66、第四方面,本技术实施例公开了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序在被处理器执行时用于执行如第一方面及第一方面任一可选项所述的车辆自动换挡方法。
67、由上述技术方案可以看出,通过接收目标车辆生成的多个信号;将所述多个信号转换为多个模型信号变量;根据所述多个模型信号变量,确定所述目标车辆的当前工况;根据所述目标车辆的当前工况,通过预设目标挡位判定策略,对所述目标车辆进行换挡。即不仅通过单一信号实现目标车辆的自动换挡,而是通过从目标车辆上获取多个信号并根据多个信号确定目标车辆的当前工况,进而对车辆挡位进行调整,实现了对目标车辆在不同工况下换到适合的挡位,提高了目标车辆的智能化程度。
- 还没有人留言评论。精彩留言会获得点赞!