一种主动纠偏地质雷达移动托举装置及方法
本发明涉及隧道无损检测,尤其涉及一种主动纠偏地质雷达移动托举装置及方法。
背景技术:
1、公路隧道在施工和运营过程中,受施工技术、地质条件、交通荷载等因素的影响,在衬砌内部和衬砌背部容易产生空洞和脱空等病害,空洞的存在改变了衬砌与围岩的接触状态,影响衬砌安全状态,而采用地质雷达进行无损探测是发现衬砌内部和背后空洞最有效的技术手段。
2、目前,公路隧道工程中对衬砌内部和背后空洞的检测主要采用地质雷达技术,在测线较矮的位置主要是由人控制地质雷达天线进行检测,在较高的位置主要是借助托举装置把人托举到较高的位置然后进行检测。但人工检测存在危险、耗时耗力的问题,因此现在主要研究直接借助机械臂把地质雷达天线托举到衬砌表面。但是由于机械臂结构尺寸和关节较多,在移动过程中机械臂容易产生较大的晃动,地质雷达天线在顶部晃动剧烈,影响检测数据的质量;并且,现有托举装置通常采用加固机械臂或者底座的方式进行减震,会增加装置的重量,缺少主动的减震方式。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种主动纠偏地质雷达移动托举装置及方法,能够有效降低检测工程中机械臂晃动和雷达天线不贴合问题,提高检测效率和质量。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
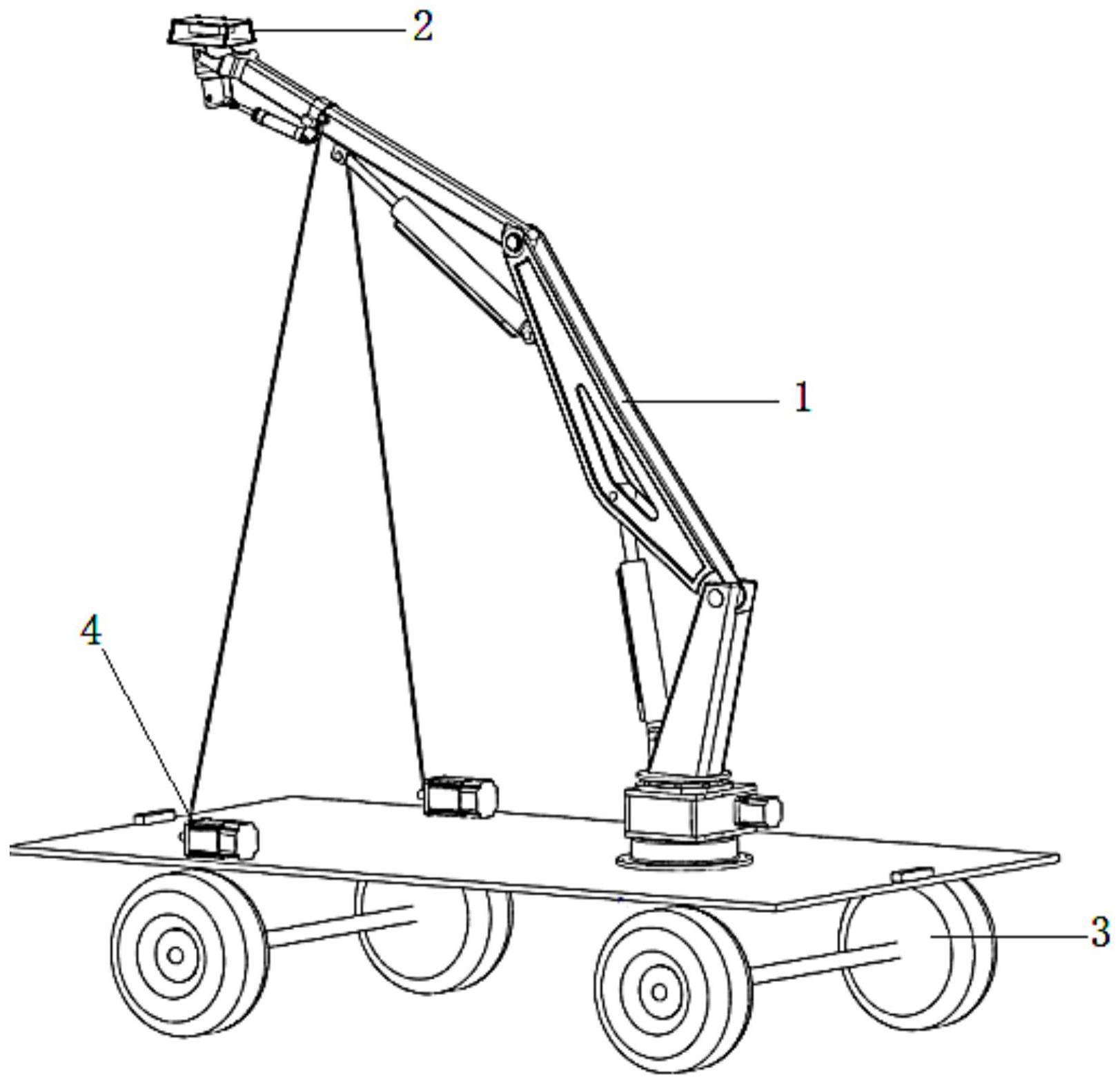
3、第一方面,本发明的实施例提供了一种主动纠偏地质雷达移动托举装置,包括机械臂,机械臂顶端安装自适应托举模块,底端通过转动平台安装于移动平台;
4、所述移动平台上表面对称安装有轴向纠偏电机,轴向纠偏电机通过牵引绳连接机械臂;所述机械臂安装有第一加速度传感器,第一加速度传感器用于获取机械臂加速度信息并反馈至轴向纠偏电机;
5、所述移动平台一端设置有第二加速度传感器,另一端设置有第三加速度传感器,第二加速度传感器、第三加速度传感器用于获取移动平台加速度信息并反馈至转动平台的横向纠偏电机。
6、作为进一步的实现方式,所述自适应托举模块包括安装有地质雷达天线的天线搭载板,所述天线搭载板顶面安装有滑轮组,天线搭载板底部通过减震杆组连接支撑板,所述支撑板与机械臂相连。
7、作为进一步的实现方式,所述滑轮组包括多个滑轮,并呈多排多列分布于天线搭载板顶面。
8、作为进一步的实现方式,所述减震杆组包括多个减震杆,减震杆通过铰支座与天线搭载板、支撑板相连。
9、作为进一步的实现方式,所述牵引绳连接至机械臂末端臂杆,两个牵引绳与机械臂的连接点对称布置。
10、作为进一步的实现方式,所述第一加速度传感器设置于牵引绳与机械臂连接位置处。
11、作为进一步的实现方式,所述转动平台包括与移动平台连接的下支座,所述下支座通过螺纹旋转装置连接上支座,机械臂底部与上支座相连。
12、作为进一步的实现方式,所述螺纹旋转装置包括横向纠偏电机、与横向纠偏电机相连的蜗轮蜗杆机构。
13、第二方面,本发明的实施例还提供了一种主动纠偏地质雷达移动托举装置的使用方法,包括:
14、调整机械臂形态,将滑轮组紧贴衬砌检测位置,并在贴壁过程中使减震杆组压缩设定长度,以获取机械臂最大高度;
15、移动机械臂,在移动过程中各加速度传感器采集机械臂以及移动平台的加速度信息,通过加速度传感器与电机转速的关系使机械臂实时纠偏。
16、作为进一步的实现方式,加速度传感器与电机转速的关系为:
17、n1=-a1*h*s*sinφ/(4*π*r1);
18、n2=-a2*l1/(4*π*r2);
19、n3=-a3*l2/(4*π*r2);
20、其中,n1表示横向纠偏电机转速,n2表示一侧轴向纠偏电机转速,n3表示另一侧轴向纠偏电机转速,l1表示第二加速度传感器距离机械臂转轴中心的直线距离,l2表示第三加速度传感器距离机械臂转轴中心的直线距离,h表示第一加速度传感器距移动平台上表面的垂直高度,a1表示第一加速度传感器的加速度,a2表示第二加速度传感器的加速度,a3表示第三加速度传感器的加速度,φ表示牵引绳水平夹角,s表示牵引绳长度,r1表示横向纠偏电机转轴半径,r2表示轴向纠偏电机转轴半径。
21、本发明的有益效果如下:
22、(1)本发明的设置多个加速度传感器,通过控制对应的纠偏电机动作,可以对搭载平台和机械臂偏移情况进行监控;自适应托举模块通过滑轮组与衬砌进行接触,减少直接摩擦产生的损坏;减震杆组对天线搭载板进行支撑,并可以吸收由于机械臂上下晃动产生的冲击,提高机械臂在竖直方向对振动的接受程度。
23、(2)本发明各加速度传感器将监测数据实时传输到中控单元,中控单元通过电机转速计算公式计算实时控制纠偏电机转动动作,对机械臂的姿态进行调整,减小机械臂轴向和左右方向的晃动情况。
24、(3)本发明加速度传感器与纠偏电机转速和转向主要通过计算公式进行关联,加速度传感器监测到机械臂移动趋势后通过纠偏电机对机械臂进行主动控制,减小机械臂整体的摇晃状态。
技术特征:
1.一种主动纠偏地质雷达移动托举装置,其特征在于,包括机械臂,机械臂顶端安装自适应托举模块,底端通过转动平台安装于移动平台;
2.根据权利要求1所述的一种主动纠偏地质雷达移动托举装置,其特征在于,所述自适应托举模块包括安装有地质雷达天线的天线搭载板,所述天线搭载板顶面安装有滑轮组,天线搭载板底部通过减震杆组连接支撑板,所述支撑板与机械臂相连。
3.根据权利要求2所述的一种主动纠偏地质雷达移动托举装置,其特征在于,所述滑轮组包括多个滑轮,并呈多排多列分布于天线搭载板顶面。
4.根据权利要求2所述的一种主动纠偏地质雷达移动托举装置,其特征在于,所述减震杆组包括多个减震杆,减震杆通过铰支座与天线搭载板、支撑板相连。
5.根据权利要求1所述的一种主动纠偏地质雷达移动托举装置,其特征在于,所述牵引绳连接至机械臂末端臂杆,两个牵引绳与机械臂的连接点对称布置。
6.根据权利要求5所述的一种主动纠偏地质雷达移动托举装置,其特征在于,所述第一加速度传感器设置于牵引绳与机械臂连接位置处。
7.根据权利要求1所述的一种主动纠偏地质雷达移动托举装置,其特征在于,所述转动平台包括与移动平台连接的下支座,所述下支座通过螺纹旋转装置连接上支座,机械臂底部与上支座相连。
8.根据权利要求7所述的一种主动纠偏地质雷达移动托举装置,其特征在于,所述螺纹旋转装置包括横向纠偏电机、与横向纠偏电机相连的蜗轮蜗杆机构。
9.根据权利要求1-8任一所述的一种主动纠偏地质雷达移动托举装置的使用方法,其特征在于,包括:
10.根据权利要求9所述的一种主动纠偏地质雷达移动托举装置的使用方法,其特征在于,加速度传感器与电机转速的关系为:
技术总结
本发明公开了一种主动纠偏地质雷达移动托举装置及方法,涉及隧道无损检测技术领域,包括机械臂,机械臂顶端安装自适应托举模块,底端通过转动平台安装于移动平台;所述移动平台上表面对称安装有轴向纠偏电机,轴向纠偏电机通过牵引绳连接机械臂;所述机械臂安装有第一加速度传感器,第一加速度传感器用于获取机械臂加速度信息并反馈至轴向纠偏电机;所述移动平台一端设置有第二加速度传感器,另一端设置有第三加速度传感器,第二加速度传感器、第三加速度传感器用于获取移动平台加速度信息并反馈至转动平台的横向纠偏电机。本发明能够有效降低检测工程中机械臂晃动和雷达天线不贴合问题,提高检测效率和质量。
技术研发人员:吕高航,刘健,张学森,崔立桩,解全一,郭峰
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!