应用于高精密机器人的工业减速机及调节方法与流程
本发明涉及机器人工业减速机,具体为应用于高精密机器人的工业减速机及调节方法。
背景技术:
1、机器人工业减速机是一种用于降低机器人电机转速、增加扭矩的传动装置,作为机器人的关节,工业机器人内部常用的减速机有以下几种:rv减速机:由摆线针轮和行星支架组成,刚度大,寿命长,精度高;谐波减速机:由波发生器、柔性齿轮和刚性齿轮三个基本构件组成,体积小,零部件数量少,传动比高,效率高;行星减速机:由太阳轮、行星轮和环状内齿圈组成,体积小,重量轻,噪音低,寿命长,载荷能力高,在多功能的减速装置中应用很广泛。
2、在减速机中,通过高速转动的输出轴来驱动内部的齿轮系转动,缩小传动比,使输出轴能够获得更低的转速以及更高的扭矩,降低负载的惯量,更有利于控制精度和相应速度。
3、而在机器人关节位置所设置的减速机,需要根据电机的动作需要来进行不同转向的调整,从而能够获得更加精准的动作,由于减速机频繁的进行正反转动的输出,容易造成齿轮的磨损,而减速机所设置的润滑系统不能够及时的根据齿轮的转动量来是实现对齿轮的润滑,导致了润滑系统的供应不及时,造成齿轮的损坏。
技术实现思路
1、本发明的目的之一在于提供应用于高精密机器人的工业减速机及调节方法,在进行减速机工作的过程中能够根据齿轮传动的行程(齿轮传动的角度所组成齿轮传动的总圈数)来实现对内部齿轮的润滑,从而能够保证在使用的过程中无论转向如何变化,在齿轮传动一定行程之后都能够进行稳定的润滑。
2、为实现以上目的,本发明通过以下技术方案予以实现:应用于高精密机器人的工业减速机,包括:
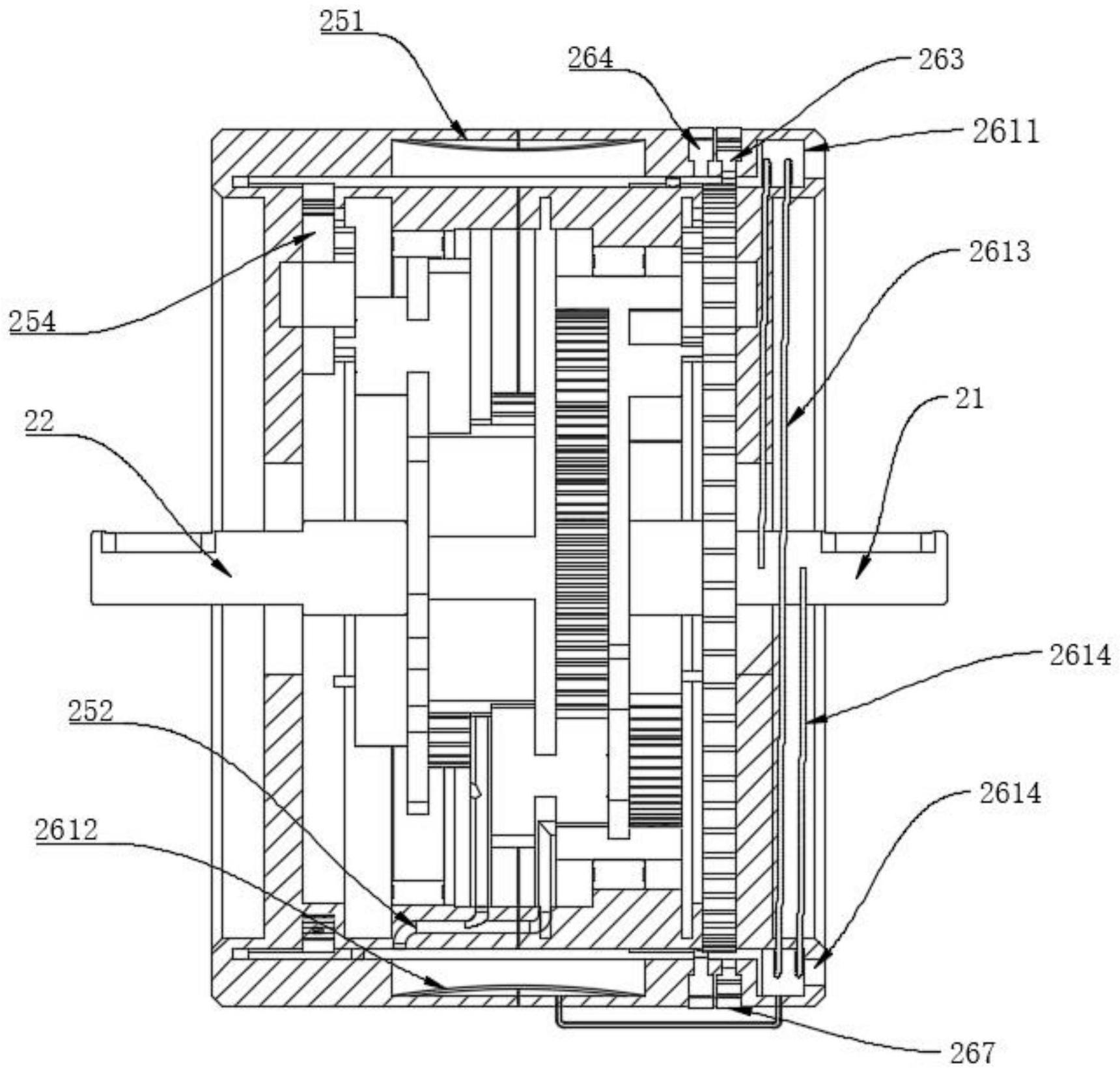
3、壳体,由外壳a和外壳b组成,壳体的两侧分别设置盖板一和盖板二,盖板一和盖板二分别形成对壳体两端的密封,外壳a、外壳b、盖板一以及盖板二之间设置固定螺栓形成壳体与盖板一和盖板二之间的连接;
4、输入轴,由壳体内部贯穿盖板一延伸至壳体外侧,壳体另一端设置输出轴,输出轴贯穿盖板二并延伸至壳体外侧,输入轴和输出轴之间设置变速齿轮系;
5、润滑系统,布置于该壳体内部,润滑系统实现与变速齿轮系的啮合,该润滑系统的一端还设置挤压结构,挤压结构形成对润滑结构的限制支撑并形成对润滑系统内部润滑油的挤压;
6、该润滑系统包括:
7、液压腔室,布置于壳体内部,该液压腔室内侧设置润滑油道,该润滑油道由壳体延伸至变速齿轮系内部,液压腔室内部设置可转动的密封环,密封环贴合液压腔室内壁且形成对液压腔室与润滑油道之间的密封,壳体内部设置惰轮,惰轮可转动安装于壳体内部,且能够跟随变速齿轮系转动,惰轮与密封环之间设置棘轮组件a和棘轮组件b形成两者之间的传动。
8、在本发明一或多个实施方式中,上述的变速齿轮系包括:
9、变速齿轮系a、变速齿轮系b,分别设置于壳体内部靠近盖板一一端以及壳体内部靠近盖板二一端,变速齿轮系a和变速齿轮系b之间啮合传动实现输入轴到输出轴之间的减速传动,惰轮分别设置于变速齿轮系a和变速齿轮系b内侧,且位于变速齿轮系与变速齿轮系b内侧设置的惰轮所连接的棘轮组件a以及棘轮组件b转向相反。
10、在本发明一或多个实施方式中,上述的变速齿轮系a包括:
11、行星齿轮系a,安装于壳体靠近盖板一一侧内壁,该行星齿轮系a外侧设置轴承a,轴承a外圈连接该壳体内壁使行星齿轮系a能够相对于壳体转动;
12、固定架,连接该壳体,该固定架内侧设置中转轮,中转轮延伸至固定架两侧并与行星齿轮系a啮合传动;
13、变速齿轮系b包括:
14、啮合轮,设置于该中转轮内侧并连接该固定架,啮合轮与中转轮之间啮合传动,啮合轮的外侧设置行星齿轮系b,行星齿轮系b形成啮合轮与输出轴之间的传动;
15、轴承b,套设于该行星齿轮系b的外侧,该轴承b的外圈连接壳体内壁;
16、隔板,设置于壳体内部并形成行星齿轮系a和行星齿轮系b之间的隔断。
17、在本发明一或多个实施方式中,上述的润滑系统还包括:
18、内齿轮,分别设置于惰轮和棘轮组件a之间以及惰轮和棘轮组件b之间,该内齿轮与惰轮啮合齿轮,且该内齿轮分别与棘轮组件a和棘轮组件b同步转动;
19、定位槽,位于该壳体内壁并形成对内齿轮的限位,内齿轮、输入轴、输出轴以及密封环同轴设置。
20、在本发明一或多个实施方式中,上述的棘轮组件a以及棘轮组件b均包括:
21、内棘轮,位于该定位槽内部并贴合该密封环内壁,内棘轮内侧设置钢环,钢环连接该内齿轮外圈,钢环内侧设置可摆动的棘爪,棘爪通过销轴连接该钢环,棘爪内侧设置扭簧进行支撑;
22、棘轮组件a与棘轮组件b所设置的内棘轮方向相反、棘爪所设置的方向相反。
23、在本发明一或多个实施方式中,上述的润滑系统还包括:
24、槽轮,连接该惰轮背离壳体的一端,行星齿轮系a以及行星齿轮系b均设置能够延伸至槽轮内侧的啮合块,行星齿轮系a和行星齿轮系b通过带动啮合块转动带动槽轮转动。
25、通孔,开设于该密封环内侧并贯穿该密封环,通孔位置能够形成液压腔室与润滑油道之间的连通。
26、在本发明一或多个实施方式中,上述的挤压结构包括:
27、插槽,开设于密封环外侧,该插槽的内侧插接插杆,插杆背离插槽的一端延伸至壳体内部;
28、导槽a、导槽b,开设于该机体内侧,且该导槽a以及导槽b均形成对插杆位置的限制,导槽a以及导槽b均为波纹状;
29、滚珠,可滚动嵌合于该插杆背离插槽一端;
30、连接架,套设于该插杆外侧并位于该导槽a以及导槽b内部,该连接架限制插杆之间的间隔角度;
31、顶板,设置于该导槽a以及导槽b内部,该顶板为弹性设置可弯曲为弧形,顶板内侧设置支撑弹簧,支撑弹簧支撑该顶板弯曲,顶板内侧设置弹性板,弹性板贴合顶板内侧面并根据顶板的弧形弯曲,滚珠接触弹性板;
32、电磁铁,固定于壳体外侧并与该导槽a以及导槽b的位置对应,电磁铁能够分别磁吸位于导槽a以及导槽b内部的顶板。
33、在本发明一或多个实施方式中,上述的挤压机构还包括:
34、气腔,位于该密封环的一侧,密封环的移动能够产生对气腔的挤压;
35、隔膜,位于该液压腔室背离密封环的一侧,隔膜连接该液压腔室,该隔膜不与液压油接触的一端连通气腔;
36、单向阀,固定于壳体内部,气腔抽气时在单向阀位置形成与外界的连通;
37、复位弹簧,设置于气腔内部形成对密封环的支撑。
38、本发明还提供一种工业减速机的调节方法,用于上述应用于高精密机器人的工业减速机,包括以下步骤:
39、s1、将减速机的输入轴与驱动装置,将输出端与机械臂连接,外壳固定于机械臂内部,通过驱动装置转动带动机械臂运动;
40、s2、驱动装置正反转对机械臂的转动方向进行控制,在减速机运动的过程中,变速齿轮系根据转向的不同实现对棘轮组件a和棘轮组件b的啮合传动,带动密封环进行不同方向的转动
41、s3、密封环位移使液压腔室与润滑油道连通,润滑油由润滑油道进入到壳体内部的变速齿轮系内侧,对变速齿轮系进行润滑;
42、s4、驱动装置正反转时通过挤压结构来进行切换。
43、在本发明一或多个实施方式中,上述的挤压结构能够调整对密封环的支撑位置,在棘轮组件a或棘轮组件b带动密封环产生不同转向时,挤压结构根据密封环的转动方向不同进行调整。
44、有益效果
45、本发明提供了应用于高精密机器人的工业减速机及调节方法。与现有技术相比具备以下有益效果:
46、1、本发明通过设置能够在使用的过程中跟随减速机同步运动的润滑系统,在使用时能够依照内部行星齿轮系的转动圈数来实现对内部齿轮之间的润滑,从而能够保证润滑的稳定性,在润滑的过程中不会受到内部行星齿轮系转向的影响。
47、2、本发明在减速机运动的过程中能够间歇性的带动润滑系统进行调整,在减速机内部的行星齿轮转动一定行程之后,能够使液压腔室与润滑油道连通,使润滑油喷入到齿轮啮合位置,从而使啮合位置被润滑,润滑油根据内部行星齿轮系的转动实现自动润滑。
48、3、本发明利用在行星齿轮系转动过程中转动作为动力,间歇性的通过槽轮带动惰轮运动,而根据输出端以及输入端的转速不同,两端所设置的惰轮转动一周所能够驱动密封环运动的距离也不同,从而能够根据内部所使用的状态不同进行不同程度的润滑。
49、4、本发明将密封环运动,在腔室内部挤压空气介质所产生的压力转变为驱动液压油从液压腔室内部喷出的动力,从而能够保证液压腔室内部的液压油被定量喷出,而单向阀的设置能够使密封环在进行复位时由减速机的外侧进行抽气。
- 还没有人留言评论。精彩留言会获得点赞!