AMT气动离合器的预测控制方法、装置、设备及介质与流程
本技术涉及领域,具体涉及amt气动离合器的预测控制方法、装置、设备及介质。
背景技术:
1、离合器控制是amt系统控制的核心,实现对离合器位置的精确控制是保证离合器寿命,提高amt换挡舒适性的重要因素。
2、一汽解放汽车有限公司2019年公开了一种气动离合器双比例积分控制方法cn109185362a,包括:在离合器滑摩阶段,根据油门开度、发动机转速和变速箱输入轴转速通过查表算法确定离合器分离目标位置和离合器结合目标位置;再通过比例积分控制方法同时对离合器的进气阀和离合器的排气阀进行控制,离合器的进气阀和排气阀同时工作,从而同时对离合器进行分离和结合控制。
3、气动离合器由于气体本身的可压缩特性,导致离合器位置控制具有滞后性和超调现象,单纯仅依靠pid控制无法解决因滞后导致的位置超调问题。
技术实现思路
1、为了解决上述问题,本技术提出了amt气动离合器的预测控制方法、装置、设备及介质,其中方法包括:
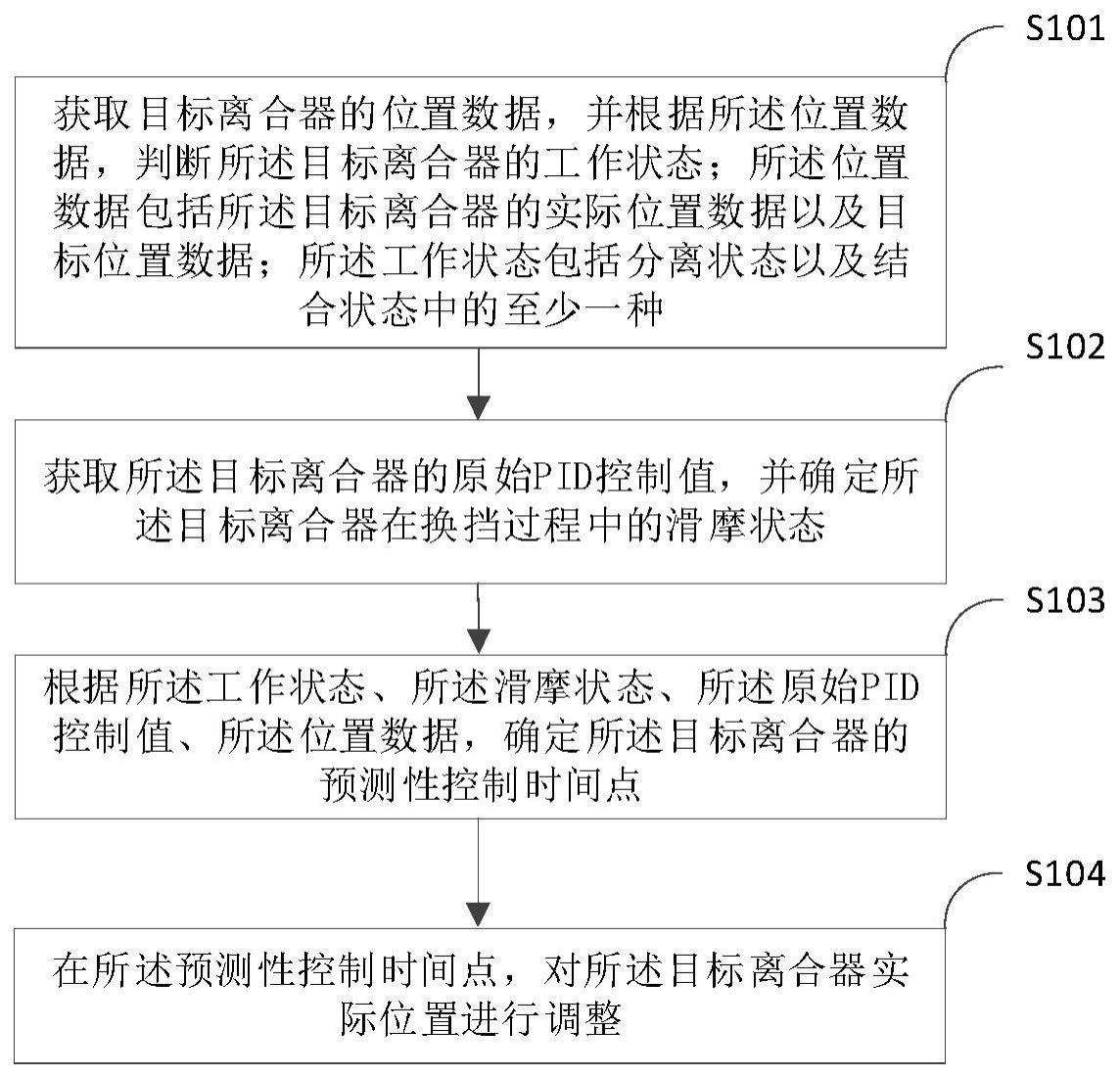
2、获取目标离合器的位置数据,并根据所述位置数据,判断所述目标离合器的工作状态;所述位置数据包括所述目标离合器的实际位置数据以及目标位置数据;所述工作状态包括分离状态以及结合状态中的至少一种;获取所述目标离合器的原始pid控制值,并确定所述目标离合器在换挡过程中的滑摩状态;根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点;在所述预测性控制时间点,对所述目标离合器实际位置进行调整。
3、在一个示例中,所述根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点,具体包括:获取当前实际位置数据对应的上一时刻的历史实际位置数据;基于所述当前实际位置以及所述目标位置,确定所述目标离合器的预期距离差;基于所述当前实际位置以及所述上一时刻的历史实际位置数据,确定所述目标离合器的实际位置变化率;若所述当前实际位置数据小于所述历史实际位置数据,且所述预期距离差低于第一距离阈值,且所述实际位置变化率大于第一变化率阈值,且所述原始pid控制值低于第一控制阈值,则将所述当前实际位置对应的当前时间节点,作为所述目标离合器在分离状态下、处于滑摩阶段时的所述预测性控制时间点。
4、在一个示例中,所述根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点,具体包括:若所述当前实际位置数据大于所述历史实际位置数据,且所述预期距离差低于第二距离阈值,且所述实际位置变化率低于第二变化率阈值,且所述原始pid控制值低于第二控制阈值,则将所述当前实际位置对应的当前时间节点,作为所述目标离合器在结合状态下、处于滑摩阶段时的所述预测性控制时间点。
5、在一个示例中,所述根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点,具体包括:获取当前实际位置数据对应的上一时刻的历史实际位置数据,以及当前目标位置数据对应的上一时刻的历史目标位置数据;基于所述当前实际位置以及所述目标位置,确定所述目标离合器的预期距离差;获取所述目标离合器对应的kp点位置数据;基于所述当前实际位置数据、所述历史实际位置数据、所述当前目标位置数据、所述历史目标位置数据,确定所述目标离合器实际位置变化率与目标位置变化率的变化率差值;若所述预期距离差低于第三距离阈值,且所述目标离合器的实际位置超过所述kp点,且所述变化率差值高于第三变化率阈值,且所述实际位置变化率大于第四变化率阈值,且所述原始pid控制值低于第三控制阈值,则将所述当前实际位置对应的当前时间节点,作为所述目标离合器在分离状态下、处于非滑摩阶段时的所述预测性控制时间点。
6、在一个示例中,所述根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点,具体包括:若所述预期距离差低于第四距离阈值,且所述目标离合器的实际位置超过所述kp点,且所述变化率差值高于第二变化率阈值,且所述实际位置变化率大于第三变化率阈值,且所述原始pid控制值低于第二控制阈值,则将所述当前实际位置对应的当前时间节点,作为所述目标离合器在结合状态下、处于非滑摩阶段时的所述预测性控制时间点。
7、在一个示例中,所述在所述预测性控制时间点,对所述目标离合器实际位置进行调整,具体包括:确定所述目标离合器处于滑摩阶段;以预期距离差为输入,对所述目标离合器的结合阀或分离阀进行pid控制,并采用低于预设占空比阈值的占空比控制结合阀或分离阀提前开启,以对离合器实际位置进行微调。
8、在一个示例中,所述在所述预测性控制时间点,对所述目标离合器实际位置进行调整,具体包括:确定所述目标离合器处于非滑摩阶段;根据预设控制权重因子、预期距离差、目标位置变化率差值,确定所述目标离合器的输入值,并采用与滑摩阶段不同的控制参数,对所述目标离合器的结合阀或分离阀进行pid控制。
9、本技术还公开了amt气动离合器的预测控制装置,包括数据获取模块,获取目标离合器的位置数据,并根据所述位置数据,判断所述目标离合器的工作状态;所述位置数据包括所述目标离合器的实际位置数据以及目标位置数据;所述工作状态包括分离状态以及结合状态中的至少一种;pid控制模块,获取所述目标离合器的原始pid控制值,并确定所述目标离合器在换挡过程中的滑摩状态;时间点判断模块,根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点;调整模块,在所述预测性控制时间点,对所述目标离合器实际位置进行调整。
10、本技术还公开了amt气动离合器的预测控制设备,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行:获取目标离合器的位置数据,并根据所述位置数据,判断所述目标离合器的工作状态;所述位置数据包括所述目标离合器的实际位置数据以及目标位置数据;所述工作状态包括分离状态以及结合状态中的至少一种;获取所述目标离合器的原始pid控制值,并确定所述目标离合器在换挡过程中的滑摩状态;根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点;在所述预测性控制时间点,对所述目标离合器实际位置进行调整。
11、本技术还公开了一种非易失性计算机存储介质,存储有计算机可执行指令,其特征在于,所述计算机可执行指令设置为:获取目标离合器的位置数据,并根据所述位置数据,判断所述目标离合器的工作状态;所述位置数据包括所述目标离合器的实际位置数据以及目标位置数据;所述工作状态包括分离状态以及结合状态中的至少一种;获取所述目标离合器的原始pid控制值,并确定所述目标离合器在换挡过程中的滑摩状态;根据所述工作状态、所述滑摩状态、所述原始pid控制值、所述位置数据,确定所述目标离合器的预测性控制时间点;在所述预测性控制时间点,对所述目标离合器实际位置进行调整。
12、通过本技术提出的方法能够带来如下有益效果:在预测性控制中,通过对离合器目标位置变化率、实际位置变化率、实际位置与目标位置的相互关系等条件的判别,同时考虑不同换挡阶段、离合器原始pid输出控制值状态,实现在合适的位置控制离合器结合阀或分离阀以准确占空比提前开启,以更加智能化的预测性控制方法减轻或消除气动离合器的位置超调现象,实现位置精确控制。
- 还没有人留言评论。精彩留言会获得点赞!