管道机器人的多模式麦克那姆式行动装置及辊子设计方法
本发明属于麦克纳姆轮,具体涉及一种管道机器人的多模式麦克那姆式行动装置及辊子设计方法。
背景技术:
1、随着社会生产力的发展,国家工业化的进步及人民生活水平的提高,越来越多的管道出现在生产与生活当中,如石油天然气管道、工业液压管道、下水管道、自来水管道、空调管道等。随着使用时间的增加,这些管道会出现阻塞,泄露,老化等问题,需要一种合适的维护工具,发生各种紧急事态时也急需一种可以在管道中穿行的运输装备。在此需求之下,各类管道机器人应运而生。
2、比较成熟的管道机器人往往将若干(一般为2-4个)行动装置辐射状分布,如附图1和图2中所示,在圆形管道中行进时,使用变径装置将各行动装置沿管道径向向外张开,附着在管道内壁,利用内壁的摩擦力驱动机器人前进。作为与管道接触并提供驱动力的部分,行动装置往往在整个机器人中拥有较为重要的地位。
3、麦克纳姆轮是一种特殊的车轮,由瑞典麦克纳姆公司的工程师bentilon于1973年发明,如附图3所示。这种车轮有中央的主轮和主轮外围的一圈辊子组成,这些辊子既可跟随主轮公转,又可绕自身的轮轴自转,各辊子的轮轴与主轮在相应位置的母线呈一个夹角,一般为45°,由于这个夹角的存在,麦克纳姆轮在运动时有平行于主轮轮轴方向的运动趋势,通过合理的结构设计与控制,便可以利用这种运动趋势使装有麦克纳姆轮的载具实现地面全向运动。
4、麦克纳姆轮带来的地面全向运动能力非常适合包括管道在内的狭小,复杂的环境,在管道机器人领域中有着巨大的应用空间。目前,国内外对于麦克纳姆式行动装置应用于机器人,尤其是管道机器人的研究拥有较高的热度,并产生了一定的成果,如在专利一种预制舱清洁除尘机器人(cn 218610784u,2023.03.14)中采用了麦克纳姆式驱动装置。该机器人在主体两侧各布置了两个麦克纳姆轮,各轮相互平行,通过轮轴与主体连接,通过电机进行驱动。
5、但是当前的麦克纳姆式行动装置都具有一些难以解决的问题:
6、1.目前,麦克那姆式行动装置中的麦克那姆轮往往是以圆柱面为外包络面进行设计的,这种结构致使其在行驶时必须与管壁或地面垂直,否则麦克那姆轮将不再具有全向运动的功能,同时磨损加剧。上述问题使得使用麦克那姆式行动装置的管道机器人在地面上行驶时必须将至少两个行动装置平行布置,而在管道中行驶时必须将各行动装置成夹角布置,在两种路况间转换时需要改变两个或更多行动装置的布置角度,如附图4所示。这种机器人需要额外添加控制行动装置布置角度的机构,导致体积的增大和控制难度的增加,另外,由于计算机控制不可避免的延时,这种机器人对于管道直径变化的适应能力会大幅下降,难以满足实际工作或作战的需求。
7、2.管道环境十分复杂,在行动中,管道机器人经常发生姿态变化,很多时候具有较大的倾角,容易发生侧翻。发生侧翻后,现有的麦克那姆式管道机器人往往无法继续正常工作,需要人工取出后重新部署,具有很大的局限性。
技术实现思路
1、有鉴于此,本发明提供了一种管道机器人的多模式麦克那姆式行动装置及辊子设计方法,能够将柱形麦克那姆轮和锥形麦克那姆轮结合,提高行动装置的适应性。
2、本发明是通过下述技术方案实现的:
3、一种管道机器人的多模式麦克那姆式行动装置,包括:支架及并列安装在支架上的麦克纳姆驱动轮和全向负重轮;麦克纳姆驱动轮和全向负重轮轴线平行;
4、麦克那姆驱动轮包括:驱动轮轴、驱动轮外壳及若干辊子a;
5、全向负重轮包括:负重轮轴、负重轮外壳及若干辊子b;
6、驱动轮轴、负重轮轴均与支架固连;驱动轮外壳通过轴承同轴套装在驱动轮轴上,负重轮外壳通过轴承同轴套装在驱负重轮轴上;驱动轮轴通过电机驱动驱动轮外壳旋转;
7、驱动轮外壳和负重轮外壳均包括中间的柱形外壳和两侧的锥形外壳;
8、若干辊子a安装在驱动轮外壳的外圆周面上,辊子a采用麦克纳姆轮式布局,即辊子a轴线与对应柱形外壳或锥形外壳的母线呈45°夹角;辊子a共排列为三圈,三圈分别对应驱动轮外壳中间的柱形外壳和两侧的锥形外壳,构成了中间的柱形麦克纳姆轮和两侧的锥形麦克纳姆轮;
9、若干辊子b安装在负重轮外壳的外圆周面上,辊子b采用全向轮式布局,即辊子b轴线与对应的柱形外壳或锥形外壳的母线垂直。
10、进一步的,所述驱动轮轴的中部固定有电机定子,驱动轮外壳上固定有电机转子;电机定子和电机转子组成电机,电机工作时,电机转子带动驱动轮外壳绕驱动轮轴的轴线旋转。
11、一种锥形麦克那姆轮辊子的设计方法,所述锥形麦克那姆轮辊子为位于驱动轮外壳的锥形外壳处的辊子a,该设计方法的具体步骤如下:
12、步骤一,以o为原点建立直角坐标系oxyz,圆锥op为锥形麦克那姆轮的理论设计圆锥,直线m为辊子轴线,点c为与地面接触的半径最大点,该点到圆锥轴线的距离为r,r的值由总体设计决定,辊子轴线与辊子母线共面的平面为平面α,曲线ab为辊子母线,点d、e、f分别为点a、b、c在直线m上的投影,线段cf、线段df、线段ef的长度由总体设计决定,其中,线段cf的长度决定了辊子的最大半径,线段df和线段ef的长度决定了辊子的轴向长度;
13、因此,圆锥op侧面在坐标系oxyz中的方程为:
14、
15、步骤二,以c为原点,以方向为x轴正方向,以方向为y轴正方向,建立直角坐标系cxyz,并将公式(1-1)由坐标系oxyz变换到坐标系cxyz,得到圆锥op侧面在坐标系cxyz中的方程:
16、由坐标系oxyz在坐标系cxyz中的位置得到坐标变换方程:
17、
18、整理得:
19、
20、将公式(1-3)带入公式(1-1),得到圆锥op侧面在坐标系cxyz中的方程:
21、
22、步骤三,由于平面α在坐标系cxyz中的方程为:
23、z=0公式(1-5)
24、联立公式(1-4)与公式(1-5),得到曲线ab,即辊子母线的方程为:
25、
26、根据辊子母线的方程,可得到辊子的模型。
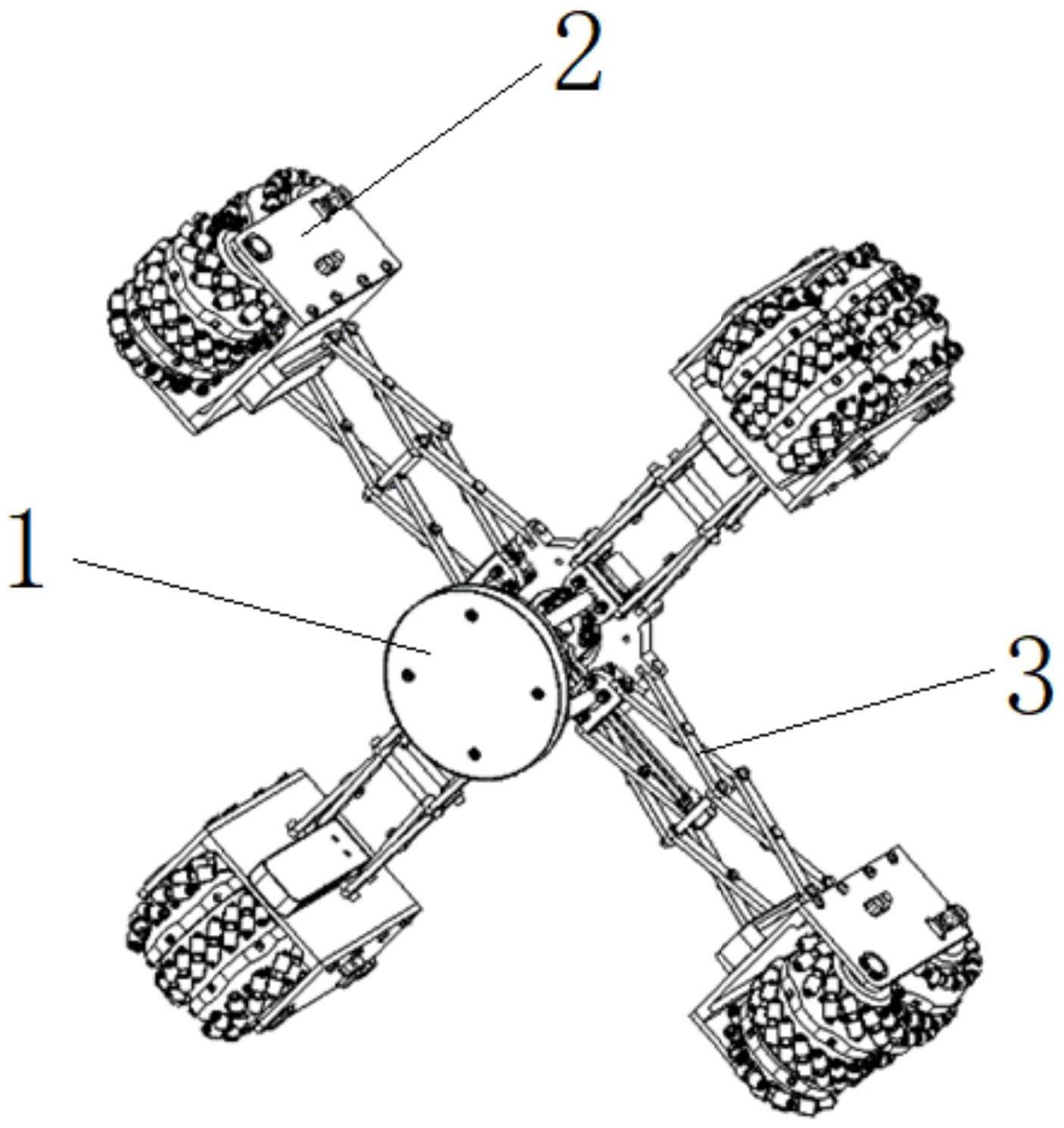
27、一种管道机器人包括:主体、四个行动装置及四个变径装置;所述行动装置采用上述行动装置;
28、所述主体为圆柱状结构的支架,四个行动装置分别一一对应通过四个变径装置与主体连接;四个行动装置以主体为中心呈辐射状等角度分布;行动装置用于提供驱动管道机器人前进的驱动力,变径装置用于改变行动装置与主体之间的距离,以适应不同管径的管道。
29、进一步的,所述主体上安装有变径动力装置、变径传动装置及四个滚珠丝杠;所述变径动力装置位于主体的中央;变径传动装置位于主体的后端,四个滚珠丝杠均布于主体的四周;且滚珠丝杠的轴线与主体的轴线平行;
30、所述变径动力装置包括:用于驱动变径装置工作的舵机和用于给舵机供电的电源;其中,舵机沿主体的轴向纵置,输出轴朝后;
31、所述变径传动装置为定轴齿轮传动,由中央的输入齿轮、输入齿轮周围均布的四个惰轮、以及位于边缘并分别和四个惰轮啮合的四个输出齿轮组成;所述输入齿轮与舵机的输出轴同轴连接,四个输出齿轮分别与四个滚珠丝杠一一对应同轴相连;四个滚珠丝杠可由舵机经过齿轮传动进行驱动,驱动时各滚珠丝杠的运动完全一致,每个滚珠丝杠对应一个变径装置。
32、进一步的,所述变径装置为剪叉式升降架;剪叉式升降架由两两交叉的八根杆组成,使得每个剪叉式升降架具有四个连接端,上下各两个连接端;剪叉式升降架下部的一个连接端与套在滚珠丝杠上的螺母相连,剪叉式升降架下部的另一个连接端与主体的前端相连,剪叉式升降架上部的一个连接端安装有一个快拆板;所述快拆板的两个相对侧面各加工有一个矩形轨道,矩形轨道的长度方向与滚珠丝杠的轴线平行;剪叉式升降架上部的另一个连接端安装有一个快拆板销,快拆板销与快拆板侧面的矩形轨道滑动配合;当剪叉式升降架下部的连接端随滚珠丝杠上的螺母沿滚珠丝杠的轴向进行直线往复运动时,剪叉式升降架上部的连接端的快拆板销同步在快拆板侧面的矩形轨道内滑动,实现剪叉式升降架的伸长或缩短,进而实现主体和行动装置之间的距离的变化,最终实现整个管道机器人的变径;
33、其中,所述快拆板的上表面加工有一个横截面为t形的轨道,行动装置上设有与其配合的t形结构,当t形的轨道与t形结构配合,同时使用螺栓进行固定后,实现行动装置与变径装置的快拆板的连接。
34、进一步的,所述管道机器人在管道中行驶时,使用变径装置将四个行动装置沿管道径向向外张开,附着在管道内壁,此时行动装置垂直于管壁,柱形麦克那姆轮接触管壁,行动模式为管道模式,可以实现管道内的全向行驶;
35、管道机器人在地面上行驶时,任意两个相邻的行动装置将会附着在地面上,此时,行动装置和地面呈45°角,锥形麦克那姆轮接触地面,行动模式为地面模式,可以实现地面上的全向行驶;
36、其中,管道机器人在地面上行驶时,若管道机器人由于路面上的障碍发生翻车,由于四个行动装置呈辐射状等角度分布在主体的四周,管道机器人依然可以保持任意两个相邻的行动装置附着在地面的状态,只需更换驱动控制策略,即可恢复正常工作。
37、有益效果:
38、(1)本发明提供了一种管道机器人的多模式麦克那姆式行动装置,设计了锥形麦克纳姆轮,并将其与传统的柱形麦克那姆轮结合,具有管道模式和地面模式等多种行动模式,在管道和地面两种路况下均可以实现全向运动,能够较好地执行同时具有上述两种路况的任务,大大提高了管道机器人的适应性与工作效能。
39、(2)本发明提供了一种锥形麦克那姆轮辊子的设计方法,该设计方法通过计算辊子的母线方程,进而得到辊子的模型,该方法的计算过程简单可靠,易于实现。
40、(3)本发明提供了一种管道机器人,该管道机器人的主体与行动装置之间通过变径装置连接,变径装置能够改变行动装置与主体之间的距离,以适应不同管径的管道,提高管道机器人的适用范围。
41、(4)本发明提供了一种管道机器人,管道机器人在地面上行驶时,若管道机器人由于路面上的障碍发生翻车,管道机器人依然可以保持任意两个相邻的行动装置附着在地面的状态,只需更换驱动控制策略,即可恢复正常工作,解决了现有的麦克那姆式管道机器人发生侧翻后无法继续正常工作的问题,提高了管道机器人的适用性。
- 还没有人留言评论。精彩留言会获得点赞!