一种快换接口及手术机器人的制作方法
本发明涉及医疗器械,具体涉及一种快换接口及手术机器人。
背景技术:
1、利用手术机器人系统执行手术操作时,穿引器被安装在机械臂末端。实践中,穿刺器先手动插入患者的手术部位,然后调整机械臂以对接穿引器。机械臂的末端设置有连接口,通过连接口与穿引器连接来实现穿引器与机械臂末端的连接。现有技术中,在对接连接口与穿引器时,操作者一手扶持穿引器以将穿引器插入连接口内,另一手扶持机械臂的同时还按压操作按钮,不便于对接操作的实现。加之穿引器在患者身上的运动范围限制,进一步增大了对接难度。
技术实现思路
1、本发明的目的在于提供一种快换接口及手术机器人,旨在降低目标器械与机械臂的对接难度,缩短对接时长。
2、为实现上述目的,本发明提供了一种快换接口,包括:
3、壳体,具有内腔,所述壳体上设有与所述内腔连通的开口;
4、锁扣,至少部分地设置在所述内腔中;所述锁扣被配置为在目标物经由所述开口进入所述内腔时被所述目标物驱使而沿退出所述内腔的方向运动;以及,
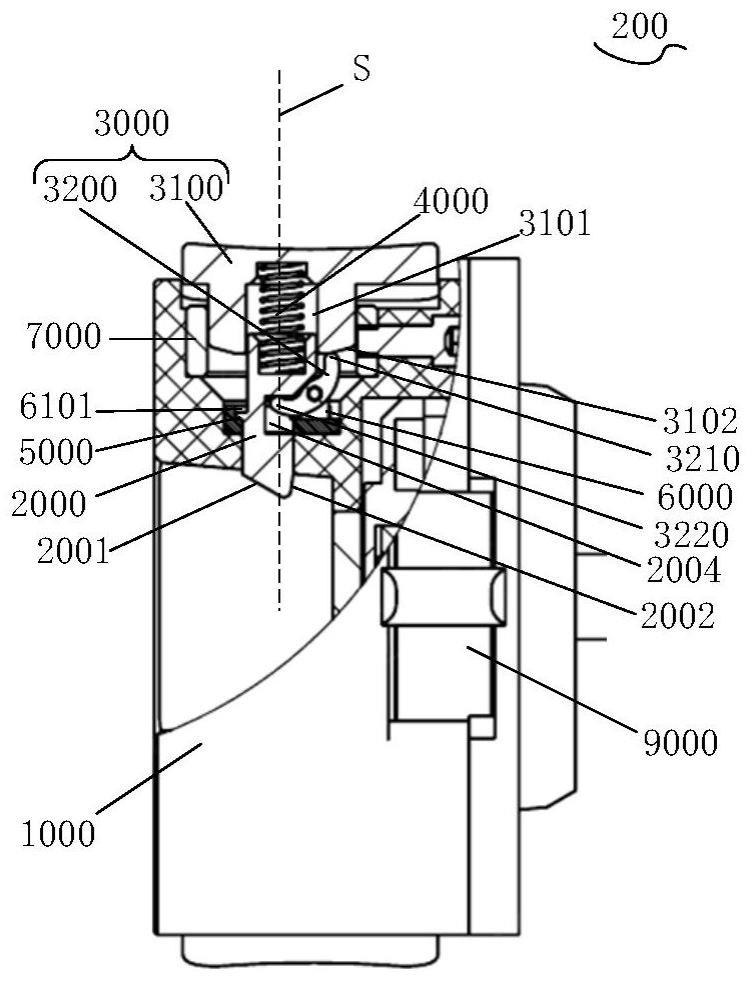
5、解锁机构,包括按压开关和传动部;所述按压开关部分地设置在所述内腔中,并用于接受外力;所述传动部设置在所述内腔中,并被配置用于在所述按压开关与所述锁扣之间传动;当所述按压开关在外力的作用下沿进入所述内腔的方向运动时,所述按压开关通过所述传动部驱使所述锁扣沿退出所述内腔的方向运动。
6、可选地,所述锁扣沿垂直所述开口的轴线的方向延伸,所述锁扣的朝向所述开口的轴线的一端的端面至少部分地形成为第一斜面,所述第一斜面到所述开口的轴线的距离沿所述开口到所述内腔的方向逐渐减小;所述第一斜面在所述目标物经由所述开口进入所述内腔时与所述目标物接触。
7、可选地,所述目标物上设有锁止槽,所述锁止槽具有倾斜侧壁;当所述目标物位于所述内腔时,所述锁止槽的槽口与所述开口的轴线平行,且所述倾斜侧壁相对于所述开口的轴线倾斜布置;
8、所述锁扣沿垂直于所述开口的轴线的方向延伸,并用于部分地插入所述锁止槽;所述锁扣上设有用于与所述倾斜侧壁贴靠的第二斜面,所述第二斜面到所述锁扣的轴线的距离沿远离所述开口的轴线的方向逐渐增大,所述第二斜面与所述锁扣的轴线所形成的锐角的角度大于所述锁扣与所述目标物之间的自锁角度。
9、可选地,所述第二斜面的粗糙度大于所述锁扣的除所述第二斜面以外的区域的粗糙度。
10、可选地,所述快换接口还包括弹性件,所述弹性件设置在所述解锁机构与所述锁扣之间;所述弹性件被配置为在所述锁扣沿退出所述内腔的方向运动时存储弹性势能;所述弹性件还被配置为在释放弹性势能时驱使所述锁扣沿进入所述内腔的方向运动,并驱使所述解锁机构复位。
11、可选地,所述快换接口还包括第一基座和第二基座,所述第一基座和所述第二基座均位于所述内腔中,并与所述壳体连接;
12、所述按压开关与所述第二基座可活动地连接,所述传动部与所述第一基座可活动地连接,所述弹性件的一端与所述按压开关连接,另一端与所述锁扣连接,所述锁扣与所述第一基座可活动地连接。
13、可选地,所述传动部通过一中心轴可转动地连接在所述第一基座上,且所述传动部分别与所述按压开关和所述锁扣接触;
14、所述快换接口被配置为当所述按压开关沿进入所述内腔的方向运动时,所述按压开关驱使所述传动部沿第一方向旋转,且所述传动部推动所述锁扣沿退出所述内腔的方向运动;当所述锁扣沿进入所述内腔的方向运动时,所述锁扣推动所述传动部沿与所述第一方向相反的第二方向旋转。
15、可选地,所述按压开关具有传力面,所述传力面位于所述内腔中;所述锁扣上设有传力槽;所述传动部具有相对的第一端和第二端,所述第一端的端面与所述传力面接触,所述第二端插入所述传力槽内;
16、所述传力面在平行于所述锁扣的轴线的平面上的投影为直线,所述直线到所述锁扣的轴线的距离沿远离所述开口的轴线的方向逐渐增大;或者,
17、所述传力面在平行于所述锁扣的轴线的平面上的投影为曲线,所述曲线的弦到所述锁扣的轴线的距离沿远离所述开口的轴线的方向逐渐增大。
18、可选地,所述传动部被配置为在平行于所述锁扣的轴线的方向上与所述第一基座保持相对静止,并能够相对于所述第一基座在垂直于所述锁扣的轴线的方向运动;
19、所述快换接口被配置为当所述按压开关在外力的作用下沿进入的方向运动时,所述按压开关驱使所述传动部沿靠近参考平面的方向运动,并推动所述锁扣沿退出所述内腔的方向运动;当所述锁扣沿进入所述内腔的方向运动时,所述锁扣推动所述传动部沿远离所述参考平面的方向运动;所述参考平面经过所述锁扣的轴线,并与所述传动部的运动方向垂直。
20、可选地,所述按压开关套设在所述锁扣的部分外侧面上,且所述按压开关具有第三斜面,所述第三斜面到所述锁扣的轴线的距离沿远离所述开口的轴线的方向逐渐减小;所述锁扣具有第四斜面,所述第四斜面到所述锁扣的轴线的距离沿远离所述开口的轴线的方向逐渐增大;
21、所述传动部具有相对的第五斜面和第六斜面,所述第五斜面到所述参考平面的距离沿远离所述开口的轴线的方向逐渐减小,所述第五斜面与所述第三斜面至少部分地贴靠;所述第六斜面到所述参考平面的距离沿远离所述开口的轴线的方向逐渐增大,所述第六斜面与所述第四斜面至少部分地贴靠。
22、可选地,所述快换接口还包括磁性件,所述磁性件设置在所述内腔中,并与所述开口相对设置。
23、与现有技术相比,本发明的快换接口及手术机器人具有如下优点:
24、前述的快换接口包括壳体、锁扣、及解锁机构;所述壳体具有内腔,所述壳体上还设有与所述内腔连通的开口;所述锁扣至少部分地设置在所述内腔中,所述锁扣被配置为在目标物经由所述开口进入所述内腔时被所述目标物驱使而沿退出所述内腔的方向运动;所述解锁机构部分地设置在所述内腔中,并与所述锁扣连接,所述解锁机构被配置为在外力的作用下运动时驱使所述锁扣沿退出所述内腔的方向运动。所述快换接口可安装于机械臂上,并用于与目标器械的插接头连接,也即,所述目标器械的所述插接头构成所述目标物。所述插接头上设有锁止槽,当所述插接头位于所述内腔中时,所述锁止槽的槽口与所述开口的轴线平行。在所述插接头进入所述内腔的过程中,所述锁扣在所述插接头的驱使下沿退出所述内腔的方向运动,使得所述锁扣能够部分地插入所述锁止槽以锁紧所述插接头。在所述锁扣锁紧所述插接头的情况下,当所述解锁机构在外力的作用下运动时,所述解锁机构驱使所述锁扣沿退出所述内腔的方向运动,使得所述锁扣能够脱离所述锁止槽以解除对所述插接头的锁紧。如此,所述快换接口在与所述目标器械连接时,操作者可一手扶持机械臂使得所述快换接口的所述开口与所述目标器械的插接头对齐,另一手扶持目标器械以将所述插接头插入所述开口并送入所述内腔即可,无需按压快换接口上的任何按钮,简化对接操作,降低对接难度,缩短对接时长。
技术特征:
1.一种快换接口,其特征在于,包括:
2.根据权利要求1所述的快换接口,其特征在于,所述锁扣沿垂直所述开口的轴线的方向延伸,所述锁扣的朝向所述开口的轴线的一端的端面至少部分地形成为第一斜面,所述第一斜面到所述开口的轴线的距离沿所述开口到所述内腔的方向逐渐减小;所述第一斜面在所述目标物经由所述开口进入所述内腔时与所述目标物接触。
3.根据权利要求1所述的快换接口,其特征在于,所述目标物上设有锁止槽,所述锁止槽具有倾斜侧壁;当所述目标物位于所述内腔时,所述锁止槽的槽口与所述开口的轴线平行,且所述倾斜侧壁相对于所述开口的轴线倾斜布置;
4.根据权利要求3所述的快换接口,其特征在于,所述第二斜面的粗糙度大于所述锁扣的除所述第二斜面以外的区域的粗糙度。
5.根据权利要求1所述的快换接口,其特征在于,所述快换接口还包括弹性件,所述弹性件设置在所述解锁机构与所述锁扣之间;所述弹性件被配置为在所述锁扣沿退出所述内腔的方向运动时存储弹性势能;所述弹性件还被配置为在释放弹性势能时驱使所述锁扣沿进入所述内腔的方向运动,并驱使所述解锁机构复位。
6.根据权利要求5所述的快换接口,其特征在于,所述快换接口还包括第一基座和第二基座,所述第一基座和所述第二基座均位于所述内腔中,并与所述壳体连接;
7.根据权利要求6所述的快换接口,其特征在于,所述传动部通过一中心轴可转动地连接在所述第一基座上,且所述传动部分别与所述按压开关和所述锁扣接触;
8.根据权利要求7所述的快换接口,其特征在于,所述按压开关具有传力面,所述传力面位于所述内腔中;所述锁扣上设有传力槽;所述传动部具有相对的第一端和第二端,所述第一端的端面与所述传力面接触,所述第二端插入所述传力槽内;
9.根据权利要求6所述的快换接口,其特征在于,所述传动部被配置为在平行于所述锁扣的轴线的方向上与所述第一基座保持相对静止,并能够相对于所述第一基座在垂直于所述锁扣的轴线的方向运动;
10.根据权利要求9所述的快换接口,其特征在于,所述按压开关套设在所述锁扣的部分外侧面上,且所述按压开关具有第三斜面,所述第三斜面到所述锁扣的轴线的距离沿远离所述开口的轴线的方向逐渐减小;所述锁扣具有第四斜面,所述第四斜面到所述锁扣的轴线的距离沿远离所述开口的轴线的方向逐渐增大;
11.根据权利要求1所述的快换接口,其特征在于,所述快换接口还包括磁性件,所述磁性件设置在所述内腔中,并与所述开口相对设置。
12.一种手术机器人,其特征在于,包括机械臂和如权利要求1-11中任一项所述的快换接口,所述快换接口设置在所述机械臂末端。
技术总结
本发明提供了一种快换接口及手术机器人,包括壳体、锁扣、解锁机构及弹性件;壳体有内腔,壳体上设有开口;锁扣在目标物经由开口进入内腔时被目标物驱使而沿退出内腔的方向运动;解锁机构,包括按压开关和传动部;按压开关部分地设置在内腔中,并用于接受外力;传动部设置在内腔中,并用于在按压开关与锁扣之间传动;当按压开关在外力的作用下沿进入内腔的方向运动时,按压开关通过传动部驱使锁扣沿退出内腔的方向运动。快换接口安装于机械臂上,并与目标器械的插接头连接,工作时,操作者一手扶持机械臂并使快换接口的开口与插接头对齐,另一手扶持目标器械并将插接头插入开口即可,无需按压快换接口上的任何按钮,操作简单方便。
技术研发人员:请求不公布姓名,请求不公布姓名,蒋友坤,请求不公布姓名
受保护的技术使用者:上海微创医疗机器人(集团)股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!