一种管道连接纠偏巡检机器人的制作方法
本发明涉及管道机器人,具体涉及一种管道连接纠偏巡检机器人。
背景技术:
1、管道是用管子、管子联接件和阀门等联接成的用于输送气体、液体或带固体颗粒的流体的装置。通常,流体经鼓风机、压缩机、泵和锅炉等增压后,从管道的高压处流向低压处,也可利用流体自身的压力或重力输送。管道的用途很广泛,主要用在给水、排水、供热、供煤气、长距离输送石油和天然气、农业灌溉、水力工程和各种工业装置中。
2、在管道排布和安装过程中,为了保障相邻管道能够快速对接以及管道接口处的密封性,需要在管道对接时确定前后管道是否在同一轴线上或接口端是否对齐,一般的在管道排布安装过程,都是由工人自行检查和对接,而对于一些比较粗重或较长的管道对接安装,往往需要多人或其他设备辅助完成。
3、在对一些敷设在地下或不便观察的管道检修时,管道接口如果发生错位,扭曲,就会影响管道的整体安全性,这就需要一种能够对管道连接巡检和纠偏的机器人来完成这一工作。
技术实现思路
1、本发明的目的在于提供一种管道连接纠偏巡检机器人能够实现管道排布对接以及管道巡检纠偏。
2、为达此目的,本发明采用以下技术方案:
3、提供一种管道连接纠偏巡检机器人,包括机架、用于在管道内移动的行走机构以及对相连管道安装纠偏的纠偏机构,行走机构和纠偏机构均通过电控模块控制,行走机构沿机架圆周分布且对称安装在机架上,纠偏机构对称安装在机架的两端,纠偏机构包括纠偏头和纠偏座,纠偏头安装在纠偏座上,纠偏座通过张紧组件安装在机架的两端。
4、优选的,所述机架包括多组环架和连接板,环架与环架之间通过连接板连接,行走机构沿端部环架圆周方向分布安装,电控模块通过安装架和杆架安装在环架和连接板组成的机身内,杆架连接两端的环架,安装架位于环架内侧且与杆架的两端固定连接。
5、优选的,所述行走机构包括轮架组件和电动脚轮以及方便电动脚轮适应不同环境和管径的适调组件,电动脚轮安装在轮架组件上,轮架组件对称安装在机架端部的两个环架上,适调组件安装在相邻两个环架之间且与对应的轮架组件连接。
6、优选的,所述轮架组件包括轮脚和脚座,电动脚轮安装在轮脚的一端,轮脚的另一端与脚座铰接,脚座固定在对应环架上,轮脚的中部与适调组件连接。
7、优选的,所述适调组件包括滑座、连杆以及斜撑,斜撑的一端与轮脚铰接另一端与滑座铰接,滑座套接在连杆上,连杆的两端分别连接相邻环架,滑座与对应环架之间通过弹簧连接,弹簧套设在对应的螺杆上且其两端分别与滑座和环架抵接。
8、优选的,所述张紧组件包括中心螺杆、电机和两个连接座,电机安装在安装架上,中心螺杆与电机的输出轴固定连接,两个连接座分别与中心螺杆的两端螺纹连接,连接座与纠偏座之间通过支杆连接,支杆的两端分别与纠偏座和连接座铰接,中心螺杆与纠偏机构之间通过杆套连接,杆套设置在中心螺杆的中部。
9、优选的,所述纠偏机构还包括纠偏架和摄像头,纠偏架固定对称安装在机架两端的环架上,摄像头通过外端板安装在纠偏架上,张紧组件位于纠偏架内侧,纠偏架与杆套之间通过架套连接,纠偏座与架套之间滑动连接。
10、优选的,所述纠偏座与支杆之间通过座角板连接,座角板固定设置在纠偏座的内侧,座角板与架套之间通过导向杆连接,导向杆固定设置在座角板上且与架套之间通过槽杆滑动连接,槽杆设置在架套上。
11、优选的,所述纠偏头包括锥形套和纠偏轴,锥形套为圆锥形结构,锥形套能够转动的套接在纠偏轴的一端,纠偏轴的另一端固定在纠偏座上。
12、优选的,所述纠偏座的顶部设置有防滑垫。
13、本发明的有益效果:为了保障相邻管道能够快速对接以及管道接口处的密封性,需要在管道对接时确定前后管道是否在同一轴线上或接口端是否对齐,本发明通过将纠偏机构设置在机架上,利用行走机构带动机架和纠偏机构在管道内移动,对管道进行巡检,在发现相邻管道的接口存在错位或扭曲时,利用纠偏机构的张紧组件分别将纠偏头和纠偏座移向前后管道接口端,在此过程中纠偏头伸入前段管道的接口内侧,纠偏座位于后段管道接口处,随后张紧组件缓慢将纠偏头和纠偏座向外展开,直到纠偏座紧贴后段管道的接口内圈边缘,而此时纠偏头也将错位的管道接口与后段管道接口对齐。本发明既可以用于管道的排布安装也可以用于管道巡检,结构简单、操作方便。
技术特征:
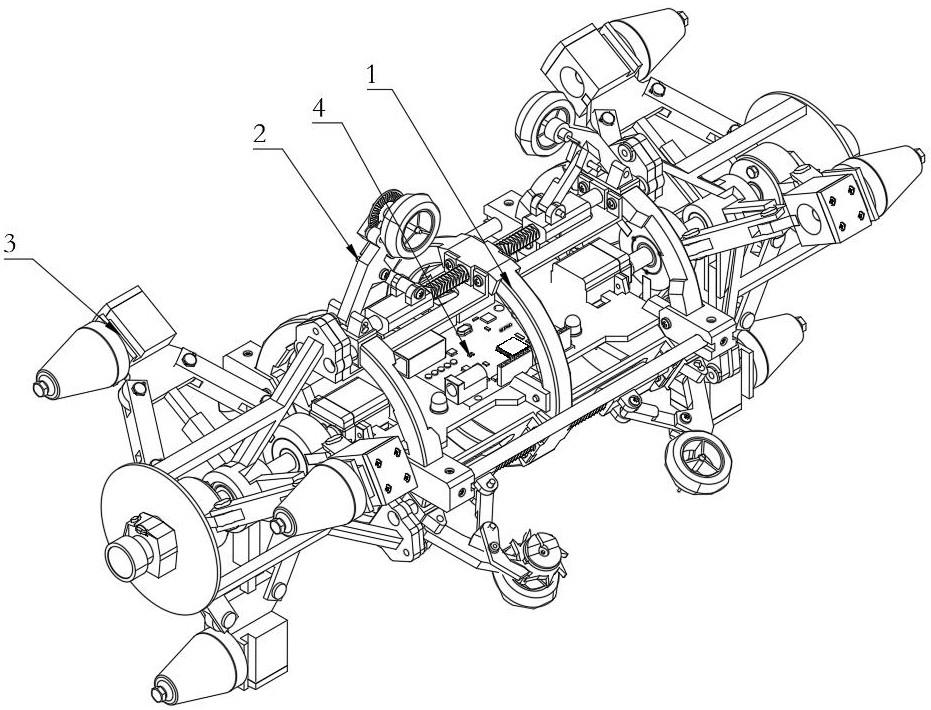
1.一种管道连接纠偏巡检机器人,其特征在于,包括机架(1)、用于在管道内移动的行走机构(2)以及对相连管道安装纠偏的纠偏机构(3),行走机构(2)和纠偏机构(3)均通过电控模块(4)控制,行走机构(2)沿机架(1)圆周分布且对称安装在机架(1)上,纠偏机构(3)对称安装在机架(1)的两端,纠偏机构(3)包括纠偏头(3c)和纠偏座(3d),纠偏头(3c)安装在纠偏座(3d)上,纠偏座(3d)通过张紧组件(3e)安装在机架(1)的两端。
2.如权利要求1所述的一种管道连接纠偏巡检机器人,其特征在于,所述机架(1)包括多组环架(1a)和连接板(1b),环架(1a)与环架(1a)之间通过连接板(1b)连接,行走机构(2)沿端部环架(1a)圆周方向分布安装,电控模块(4)通过安装架(1d)和杆架(1c)安装在环架(1a)和连接板(1b)组成的机身内,杆架(1c)连接两端的环架(1a),安装架(1d)位于环架(1a)内侧且与杆架(1c)的两端固定连接。
3.如权利要求2所述的一种管道连接纠偏巡检机器人,其特征在于,所述行走机构(2)包括轮架组件(2a)和电动脚轮(2b)以及方便电动脚轮(2b)适应不同环境和管径的适调组件(2c),电动脚轮(2b)安装在轮架组件(2a)上,轮架组件(2a)对称安装在机架(1)端部的两个环架(1a)上,适调组件(2c)安装在相邻两个环架(1a)之间且与对应的轮架组件(2a)连接。
4.如权利要求3所述的一种管道连接纠偏巡检机器人,其特征在于,所述轮架组件(2a)包括轮脚(2a1)和脚座(2a2),电动脚轮(2b)安装在轮脚(2a1)的一端,轮脚(2a1)的另一端与脚座(2a2)铰接,脚座(2a2)固定在对应环架(1a)上,轮脚(2a1)的中部与适调组件(2c)连接。
5.如权利要求4所述的一种管道连接纠偏巡检机器人,其特征在于,所述适调组件(2c)包括滑座(2c1)、连杆(2c2)以及斜撑(2c3),斜撑(2c3)的一端与轮脚(2a1)铰接另一端与滑座(2c1)铰接,滑座(2c1)套接在连杆(2c2)上,连杆(2c2)的两端分别连接相邻环架(1a),滑座(2c1)与对应环架(1a)之间通过弹簧(2c4)连接,弹簧(2c4)套设在对应的螺杆上且其两端分别与滑座(2c1)和环架(1a)抵接。
6.如权利要求2所述的一种管道连接纠偏巡检机器人,其特征在于,所述张紧组件(3e)包括中心螺杆(3e1)、电机(3e2)和两个连接座(3e3),电机(3e2)安装在安装架(1d)上,中心螺杆(3e1)与电机(3e2)的输出轴固定连接,两个连接座(3e3)分别与中心螺杆(3e1)的两端螺纹连接,连接座(3e3)与纠偏座(3d)之间通过支杆(3e4)连接,支杆(3e4)的两端分别与纠偏座(3d)和连接座(3e3)铰接,中心螺杆(3e1)与纠偏机构(3)之间通过杆套(3e5)连接,杆套(3e5)设置在中心螺杆(3e1)的中部。
7.如权利要求6所述的一种管道连接纠偏巡检机器人,其特征在于,所述纠偏机构(3)还包括纠偏架(3a)和摄像头(3b),纠偏架(3a)固定对称安装在机架(1)两端的环架(1a)上,摄像头(3b)通过外端板(3a1)安装在纠偏架(3a)上,张紧组件(3e)位于纠偏架(3a)内侧,纠偏架(3a)与杆套(3e5)之间通过架套(3a2)连接,纠偏座(3d)与架套(3a2)之间滑动连接。
8.如权利要求7所述的一种管道连接纠偏巡检机器人,其特征在于,所述纠偏座(3d)与支杆(3e4)之间通过座角板(3d2)连接,座角板(3d2)固定设置在纠偏座(3d)的内侧,座角板(3d2)与架套(3a2)之间通过导向杆(3d1)连接,导向杆(3d1)固定设置在座角板(3d2)上且与架套(3a2)之间通过槽杆(3a3)滑动连接,槽杆(3a3)设置在架套(3a2)上。
9.如权利要求8所述的一种管道连接纠偏巡检机器人,其特征在于,所述纠偏头(3c)包括锥形套(3c1)和纠偏轴(3c2),锥形套(3c1)为圆锥形结构,锥形套(3c1)能够转动的套接在纠偏轴(3c2)的一端,纠偏轴(3c2)的另一端固定在纠偏座(3d)上。
10.如权利要求9所述的一种管道连接纠偏巡检机器人,其特征在于,所述纠偏座(3d)的顶部设置有防滑垫(3d3)。
技术总结
本发明涉及管道机器人技术领域,具体涉及一种管道连接纠偏巡检机器人,为了保障相邻管道能够快速对接以及管道接口处的密封性,需要在管道对接时确定前后管道是否在同一轴线上或接口端是否对齐,本发明通过将纠偏机构设置在机架上,利用行走机构带动机架和纠偏机构在管道内移动,对管道进行巡检,在发现相邻管道的接口存在错位或扭曲时,将纠偏头伸入前段管道的接口内侧,纠偏座位于后段管道接口处,随后张紧组件缓慢将纠偏头和纠偏座向外展开,直到纠偏座紧贴后段管道的接口内圈边缘,而此时纠偏头也将错位的管道接口与后段管道接口对齐。本发明既可以用于管道的排布安装也可以用于管道巡检,结构简单、操作方便。
技术研发人员:陈茂晨
受保护的技术使用者:道雨耐节能科技宿迁有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!