一种水中位姿稳定的管道检测机器人的制作方法
本发明涉及管道检测,具体为一种水中位姿稳定的管道检测机器人。
背景技术:
1、管道经使用一段时间后,需要对管道的内壁进行检测,便于人们及时的发现在使用过程中由于流水中的杂质与管道内壁摩擦产生的裂痕,防止裂痕持续加大,最终导致管道内壁出现破坏;
2、现有的管道检测机器人在对管道进行检测时,当管道内流动有较大的水流时,由于水流沿着管道流动并冲击着沿着管道内部前进的管道检测机器人,导致管道检测机器人与管道内壁的抓紧力不能够抵抗流水对管道机器人的冲击力,导致管道检测机器人在管道内壁姿态不稳,甚至会出现管道检测机器人被较大水流冲击的作用下相对管道滑动一段距离,影响检测精度。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是最接近的现有技术。
技术实现思路
1、本发明的目的在于提供一种水中位姿稳定的管道检测机器人,以解决上述背景技术中提出的管道检测机器人在管道内水流较大时姿态不稳定、检测精度低的问题。
2、为实现上述目的,本发明提供如下技术方案:
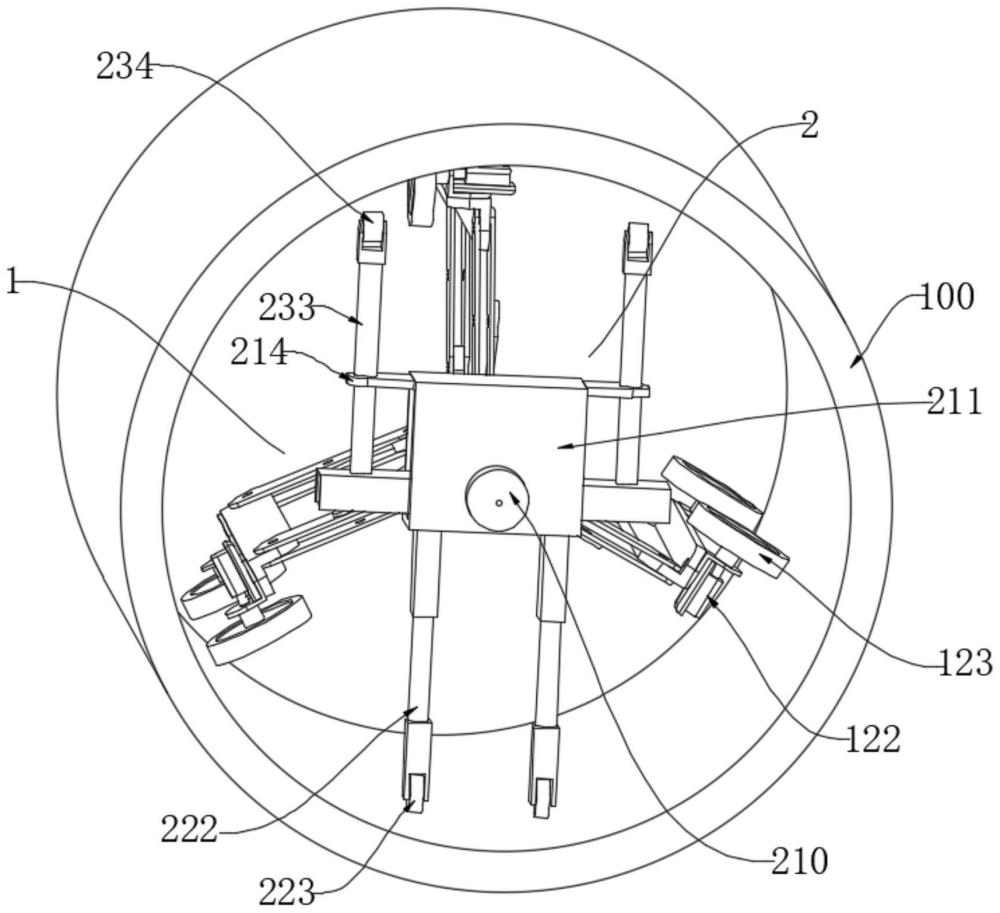
3、一种水中位姿稳定的管道检测机器人,包括管道件和设于所述管道件内部用于检测管道内壁的检测探头,还包括:
4、推进单元,包括设于所述管道件内部用于推进检测探头沿着管道件向前移动的推进组件和设于所述推进组件外侧用于将推进组件支撑在管道件轴线上的顶紧组件;
5、检测单元,包括用于对所述检测探头进行角度平衡的平衡组件,设于所述平衡组件下部用于在管道件内无流水时将平衡组件支撑在所述管道件底部的下支组件,设于所述平衡组件上端用于在管道件内部出现流水时对平衡组件上部进行支撑的上支组件。
6、进一步的,所述平衡组件包括:
7、平衡架,连接在所述检测探头后端,所述平衡架两侧设有用于对上支组件的升降进行导向的导槽,所述导槽的两侧设有导轨;
8、转轴,连接在所述平衡架相对检测探头的一端,其一端与所述顶紧组件连接。
9、进一步的,所述下支组件包括:
10、安装板,设有两组,连接在所述平衡架的下端;
11、下支架,连接在所述安装板下端;
12、下顶轮,转动连接在所述下支架内部,用于对平衡架底部进行支撑。
13、进一步的,所述上支组件包括:
14、载板,滑动插接在所述导槽内部,其两侧均连接有插接在导轨内的导板,用于对载板沿着导槽上下移动进行导向;
15、上支架,连接在所述载板上端,所述上支架外侧套设有导块,用于对上支架移动进行限位,所述导块连接在所述平衡架侧部;
16、上顶轮,转动连接在上支架顶部。
17、进一步的,所述载板侧部插接有中空塑料,用于在管道件内部存在流水时通过中空塑料与流水之间的浮力对连接有检测探头的平衡架进行角度平衡。
18、进一步的,所述顶紧组件包括:
19、主轴,连接在所述平衡架一端,用于推动平衡架向前移动;
20、推力弹簧,套设在所述主轴外侧;
21、套环,滑动套设在所述主轴外侧且一端与所述推力弹簧接触。
22、进一步的,所述推进组件包括:
23、顶杆,沿着主轴外侧等角度设有三组,转动连接在所述套环外侧;
24、转杆,位于所述推力弹簧的两端设有两排,且其中一排转杆与所述顶杆对应设置有三组,转动连接在所述主轴外侧,其一侧与所述顶杆的上端转动连接;
25、支杆,转动连接在所述转杆上端,其上端安装有驱动电机;
26、驱动轮,连接在所述驱动电机的驱动端,用于与管道件内部配合带动检测单元沿着管道件移动。
27、与现有技术相比,本发明的有益效果是:
28、1、本发明通过平衡架带动检测探头沿着管道件移动,平衡架通过安装板带动下支架移动,下支架带动下顶轮沿着管道件内壁底部移动,通过多组驱动轮等角度的支撑在管道件的内壁,使得在管道件内部无水流或者少量水流时,检测探头能够平稳的沿着管道件内壁进行移动并检测。
29、2、本发明通过在管道件内部水流较大时,上顶轮与下顶轮共同顶紧在管道件内壁,确保管道机器人整体与管道件内壁之间的接触部位进一步增加,即加大了管道机器人与管道件内壁之间的摩擦力,有效的防止由于较大的水流冲击导致管道检测机器人姿态不稳定,提高检测精度。
30、3、本发明通过在管道件内部较大的水流高度低于中空塑料后,中空塑料再次移动到导槽底部,使得上顶轮脱离管道件内壁,有效的减小管道机器人在前进时与管道件内壁之间的摩擦,极大的降低了能耗。
技术特征:
1.一种水中位姿稳定的管道检测机器人,包括管道件(100)和设于所述管道件(100)内部用于检测管道内壁的检测探头(210),其特征在于,还包括:
2.根据权利要求1所述的一种水中位姿稳定的管道检测机器人,其特征在于:
3.根据权利要求2所述的一种水中位姿稳定的管道检测机器人,其特征在于:
4.根据权利要求3所述的一种水中位姿稳定的管道检测机器人,其特征在于:
5.根据权利要求4所述的一种水中位姿稳定的管道检测机器人,其特征在于:
6.根据权利要求2所述的一种水中位姿稳定的管道检测机器人,其特征在于:
7.根据权利要求6所述的一种水中位姿稳定的管道检测机器人,其特征在于:
技术总结
本发明公开了一种水中位姿稳定的管道检测机器人,包括管道件和设于所述管道件内部用于检测管道内壁的检测探头,还包括:推进单元,包括设于所述管道件内部用于推进检测探头沿着管道件向前移动的推进组件和设于所述推进组件外侧用于将推进组件支撑在管道件轴线上的顶紧组件;检测单元,包括用于对所述检测探头进行角度平衡的平衡组件。通过使得上顶轮与下顶轮共同顶紧在管道件内壁,确保管道机器人整体与管道件内壁之间的接触部位进一步增加,即加大了管道机器人与管道件内壁之间的摩擦力,有效的防止由于较大的水流冲击导致管道检测机器人姿态不稳定,提高检测精度。
技术研发人员:汤丁丁,郭二卫,祝安全,汪小东,卢仲兴,刘学进,张利娜,周艳,赵皇,湛德,高立,范巍
受保护的技术使用者:中建三局绿色产业投资有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!