一种RV减速器、用于RV减速器的调节装置及机器人的制作方法
本发明属于减速器,具体涉及一种rv减速器、用于rv减速器的调节装置及机器人。
背景技术:
1、rv减速器主要由一级行星齿轮传动和二级摆线针轮传动组成,其是一种新型的摆线针轮行星传动减速器。rv减速器运行过程中承受的负载通常较大,这对rv减速器的刚度、抗冲击能力等性能提出了较高的要求。rv减速器中行星架与针齿壳之间、针齿壳与刚性盘之间均装配有轴承,在螺栓的牵引作用下,行星架、刚性盘分别被固定于针齿壳的一侧,实现整机合套。通常,行星架、刚性盘、针齿壳及轴承的轴向尺寸存在无法避免的波动;合套后,如果轴承的预紧量实测数值与理论数值偏差大,将影响整机的刚性和寿命。为解决轴承的预紧量(行星架、刚性盘、针齿壳及轴承的轴向尺寸)问题,通常采取更换减速器零件,重复装配并测试轴承预紧量的措施调整,过程繁琐,且调节精度不易控制。装配后的减速器在运行过程中因磨损、振动等因素,会引起轴承轴向预紧量逐渐变小,导致轴承弯矩刚性逐渐减弱,承受弯矩能力下降。如何快速有效地调节轴承的预紧量,保证样机的刚度和寿命,是业界亟需解决的问题。
技术实现思路
1、因此,本发明提供一种rv减速器、用于rv减速器的调节装置及机器人,能够解决现有技术中更换减速器零件,重复装配并测试轴承预紧量的措施调整,过程繁琐,且调节精度不易控制的技术问题。
2、本发明提供了一种rv减速器,所述rv减速器包括针齿壳、刚性盘、行星架、第一轴承和第二轴承;所述第一轴承包括第一外圈和第一内圈,所述第二轴承包括第二外圈和第二内圈;所述第一外圈和所述第二外圈同轴固定在所述针齿壳上,所述第一内圈设置在所述行星架上,所述第二内圈设置在所述刚性盘上;
3、所述行星架和所述刚性盘之间经支撑柱连接,转动所述支撑柱绕自身轴线转动能够调整所述支撑柱位于所述行星架和所述刚性盘之间的长度。
4、在一些实施例中,所述支撑柱的轴线与所述第一轴承、所述第二轴承的轴线平行;所述行星架上设置有第一螺纹孔,所述支撑柱的第一端朝向所述行星架,所述支撑柱的第一端的外圆面设置有与所述第一螺纹孔螺纹连接的第一螺纹段;所述支撑柱经所述第一螺纹段与所述行星架连接,所述支撑柱能够相对所述刚性盘转动。
5、在一些实施例中,所述刚性盘上设置有沉头孔,所述支撑柱的第二端的外圆面为配合圆面,所述配合圆面与所述沉头孔的内圆面贴合;
6、所述支撑柱的第二端的端面设置有第二螺纹孔,所述沉头孔的底面设置有贯穿所述刚性盘的通孔。
7、在一些实施例中,所述刚性盘上设置有第三螺纹孔,所述第三螺纹孔的旋向与所述第一螺纹孔的旋向相反;所述支撑柱的第二端的外圆面设置有与所述第三螺纹孔相匹配的第二螺纹段。
8、本发明还提供了一种rv减速器的调节装置,所述调节装置用于调试所述的rv减速器。
9、在一些实施例中,所述调节装置包括传动轴,所述支撑柱的第一端的端面设置有加力孔,所述传动轴的第一端能够插入所述加力孔带动所述支撑柱转动。
10、在一些实施例中,所述支撑柱有多个,所述传动轴与所述支撑柱数量相同,每个所述传动轴上均设置有一个从动齿轮;多个所述传动轴之间设置有动力轴,所述动力轴上设置有主动齿轮,所述主动齿轮同时与每个所述从动齿轮均啮合。
11、在一些实施例中,所述调节装置包括固定架,所述固定架包括固定盘和固定柱,所述固定盘经所述固定柱可拆卸连接在所述行星架上;
12、所述传动轴和所述动力轴均可绕自身轴线转动的穿过所述固定盘设置;
13、当所述固定架连接在所述行星架上时,所述传动轴与所述支撑柱相连,当所述固定架从所述行星架上拆下时,所述传动轴与所述支撑柱断开。
14、在一些实施例中,所述传动轴上设置有挡板,所述挡板位于所述从动齿轮和所述固定盘之间;所述挡板与所述固定盘之间设置有弹性件,所述弹性件的一端与所述固定盘相接,另一端与所述挡板相接。
15、在一些实施例中,所述固定架还包括平衡盘,所述平衡盘固定在所述固定柱上并位于所述固定盘与所述行星架之间,所述平衡盘与所述固定盘之间形成有间隔,所述传动轴和所述动力轴穿过所述平衡盘。
16、本发明还提供了一种机器人,包括所述的rv减速器。
17、本发明通过控制支撑柱绕自身轴线转动调整位于行星架和刚性盘之间的部分的长度,提高了调整第一内圈圈和第二内圈之间的轴向距离,比现有技术需要将rv减速器的轴承拆下进行更换更加快捷方便;由于无需将两个轴承的外圈从针齿壳上拆下,避免了两个轴承出现较大的同轴度误差,提高了两个轴承的同轴度,有利于提高rv减速器的工作精度。
技术特征:
1.一种rv减速器,其特征在于,所述rv减速器包括针齿壳(5)、刚性盘(6)、行星架(7)、第一轴承(1)和第二轴承(2);所述第一轴承(1)包括第一外圈(101)和第一内圈(102),所述第二轴承(2)包括第二外圈(201)和第二内圈(202);所述第一外圈(101)和所述第二外圈(201)同轴固定在所述针齿壳(5)上,所述第一内圈(102)设置在所述行星架(7)上,所述第二内圈(202)设置在所述刚性盘(6)上;
2.根据权利要求1所述的rv减速器,其特征在于,所述支撑柱(8)的轴线与所述第一轴承(1)、所述第二轴承(2)的轴线平行;所述行星架(7)上设置有第一螺纹孔(301),所述支撑柱(8)的第一端朝向所述行星架(7),所述支撑柱(8)的第一端的外圆面设置有与所述第一螺纹孔(301)螺纹连接的第一螺纹段(401);所述支撑柱(8)经所述第一螺纹段(401)与所述行星架(7)连接,所述支撑柱(8)能够相对所述刚性盘(6)转动。
3.根据权利要求2所述的rv减速器,其特征在于,所述刚性盘(6)上设置有沉头孔(601),所述支撑柱(8)的第二端的外圆面为配合圆面(802),所述配合圆面(802)与所述沉头孔(601)的内圆面贴合;
4.根据权利要求2所述的rv减速器,其特征在于,所述刚性盘(6)上设置有第三螺纹孔(303),所述第三螺纹孔(303)的旋向与所述第一螺纹孔(301)的旋向相反;所述支撑柱(8)的第二端的外圆面设置有与所述第三螺纹孔(303)相匹配的第二螺纹段(402)。
5.一种rv减速器的调节装置,其特征在于,所述调节装置用于调试权利要求1-4任一项所述的rv减速器。
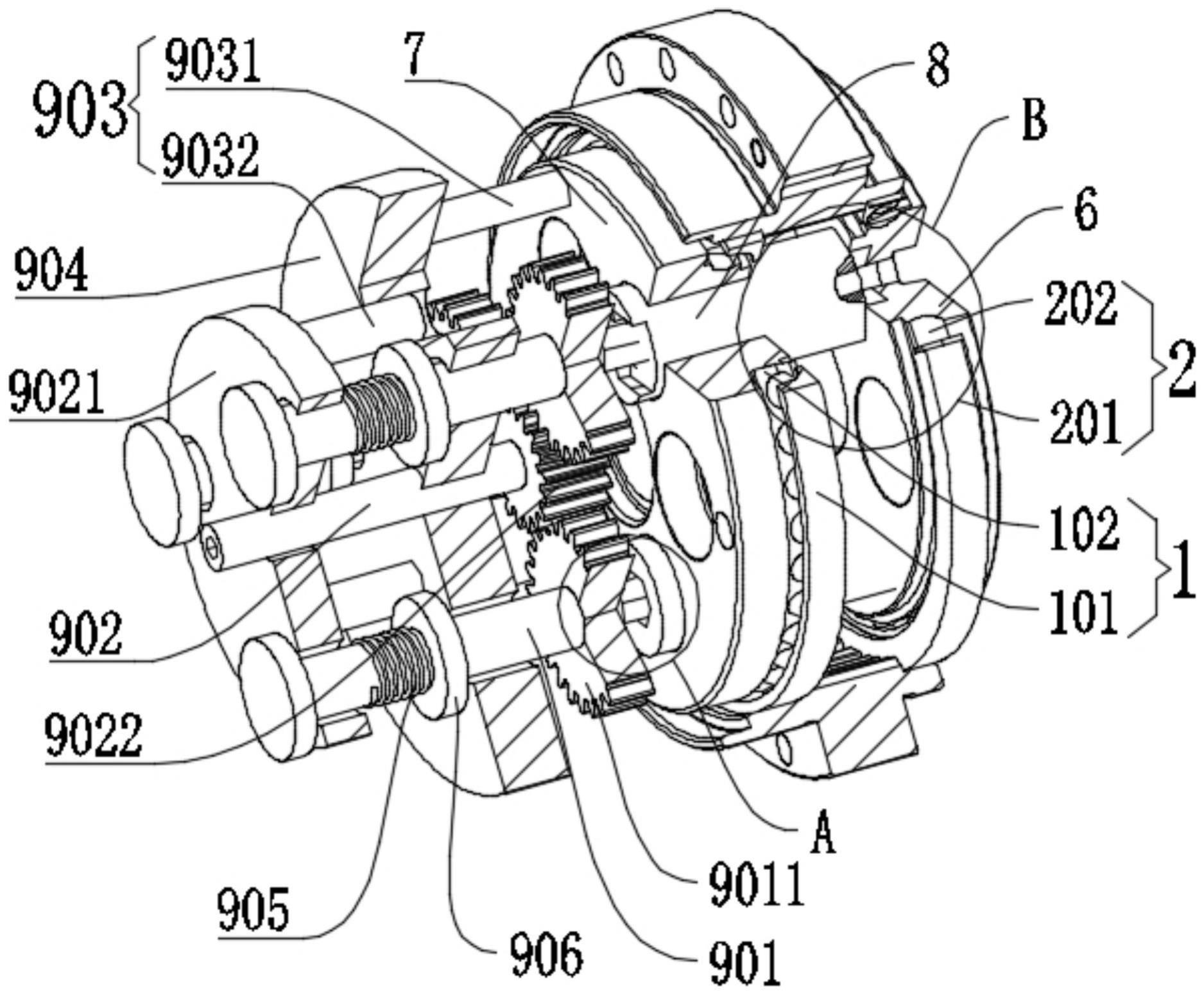
6.根据权利要求5所述的调节装置,其特征在于,所述调节装置包括传动轴(901),所述支撑柱(8)的第一端的端面设置有加力孔(801),所述传动轴(901)的第一端能够插入所述加力孔(801)带动所述支撑柱(8)转动。
7.根据权利要求6所述的调节装置,其特征在于,所述支撑柱(8)有多个,所述传动轴(901)与所述支撑柱(8)数量相同,每个所述传动轴(901)上均设置有一个从动齿轮(9012);多个所述传动轴(901)之间设置有动力轴(902),所述动力轴(902)上设置有主动齿轮(9022),所述主动齿轮(9022)同时与每个所述从动齿轮(9012)均啮合。
8.根据权利要求7所述的调节装置,其特征在于,所述调节装置包括固定架,所述固定架包括固定盘(9021)和固定柱(903),所述固定盘(9021)经所述固定柱(903)可拆卸连接在所述行星架(7)上;
9.根据权利要求8所述的调节装置,其特征在于,所述传动轴(901)上设置有挡板(906),所述挡板(906)位于所述从动齿轮(9012)和所述固定盘(9021)之间;所述挡板(906)与所述固定盘(9021)之间设置有弹性件,所述弹性件的一端与所述固定盘(9021)相接,另一端与所述挡板(906)相接。
10.根据权利要求8所述的调节装置,其特征在于,所述固定架还包括平衡盘(904),所述平衡盘(904)固定在所述固定柱(903)上并位于所述固定盘(9021)与所述行星架(7)之间,所述平衡盘(904)与所述固定盘(9021)之间形成有间隔,所述传动轴(901)和所述动力轴(902)穿过所述平衡盘(904)。
11.一种机器人,其特征在于,包括权利要求1-4任一项所述的rv减速器。
技术总结
本发明提供一种RV减速器、用于RV减速器的调节装置及机器人,RV减速器包括针齿壳、刚性盘、行星架、第一轴承和第二轴承;第一轴承包括第一外圈和第一内圈,第二轴承包括第二外圈和第二内圈;第一外圈和第二外圈同轴固定在针齿壳上,第一内圈设置在行星架上,第二内圈设置在刚性盘上;行星架和刚性盘之间经支撑柱连接,转动支撑柱绕自身轴线转动能够调整支撑柱位于行星架和刚性盘之间的长度,以解决现有技术中更换减速器零件,重复装配并测试轴承预紧量的措施调整,过程繁琐,且调节精度不易控制的技术问题。
技术研发人员:陈伟,胡亮,史宝强,刘成,程中甫,王金然
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!