一种商用车AMT挡位控制方法与流程
本发明涉及电动商用车amt变速箱,特别涉及一种商用车amt变速箱挡位及取力器控制方法。
背景技术:
1、目前amt变速箱挡位控制方法,大部分采用位置反馈闭环控制选进挡机构,实现快速精确的换挡控制,但在高磁等复杂环境下,选换挡机构位置模拟量采集被干扰失真,导致控制器反馈错误的挡位状态,也无法基于位置反馈实现闭环选换挡机构控制,车辆环境适应能力差;因pto(power-take-off,取力器)结合分离及驻车行车不同取力工况涉及挡位控制,进一步导致高磁环境等复杂工况下使用pto困难,一般通过更改变速箱机械结构,额外增加空挡限位装置实现该工况挡位控制需求,但机械结构改变会影响整车机械布置,额外增加限位装置的控制,大大增加解决问题成本,也不利于多车型不同变速箱结构的平台化推广。
2、综上所述,如何在高磁环境下解决反馈挡位控制失效阻碍pto应用的难题,是本领域亟待解决的重要问题之一。
技术实现思路
1、本发明的目的是提供一种商用车amt挡位控制方法,以解决现有技术中的不足,它能够解决在高磁环境下反馈挡位控制失效阻碍pto应用的难题。
2、本发明提供了一种商用车amt挡位控制方法,其中,包括以下步骤,
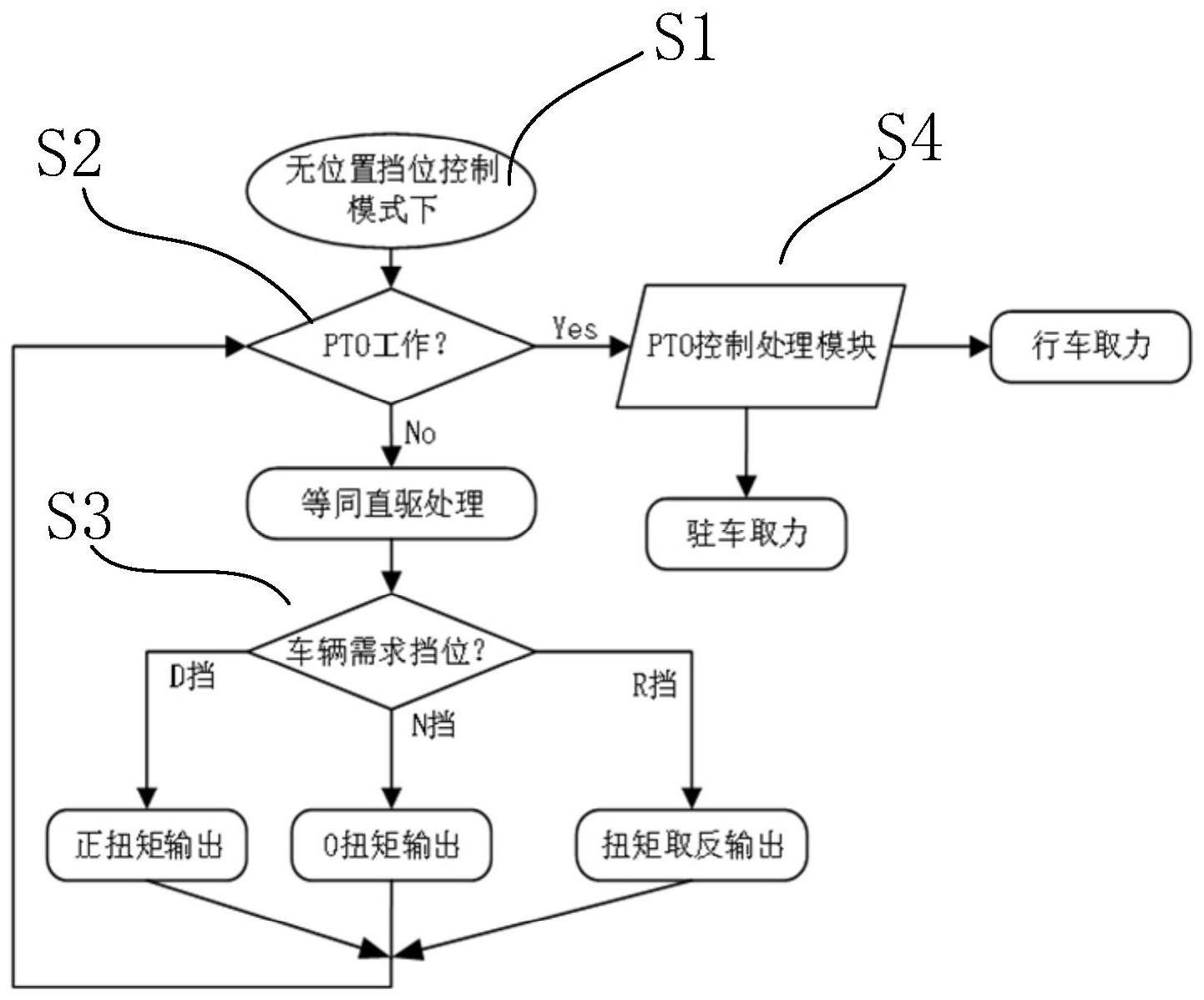
3、s1,获取由手动触发的信号后,进入无位置挡位控制模式;
4、s2,判断取力器是否工作,如果是,执行步骤s4;如果否,执行步骤s3;
5、s3,判断车辆需求挡位,并根据需求挡位输出对应的扭矩;
6、s4,由变速箱控制器执行取力控制。
7、如上所述的商用车amt挡位控制方法,其中,可选的是,步骤s3为,获取车辆需求挡位,并按所述车辆需求挡位,以直驱的方式控制扭矩输出;
8、当所述车辆需求挡位为d挡时,按第一方向输出扭矩;
9、当所述车辆需求挡位为n挡时,控制扭矩为零;
10、当所述车辆需求挡位为r挡时,按第二方向输出扭矩,所述第一方向与所述第二方向相反。
11、如上所述的商用车amt挡位控制方法,其中,可选的是,步骤s4包括,
12、s41,判断是否获得驻车取力请求,如果是,执行步骤s42;如果否,执行步骤s45;
13、s42,执行无位置回空挡控制;
14、s43,执行取力器结合控制;
15、s44,执行并保持驻车取力和转速控制,直到无驻车取力请求时退出;
16、s45,根据是否在挡,结束驻车取力。
17、如上所述的商用车amt挡位控制方法,其中,可选的是,当执行结束驻车取力时,步骤s45包括,
18、s451,判断是否在挡,如果是,执行步骤s455;如果否,执行步骤s452;
19、s452,调节转速模式;
20、s453,执行取力分离控制;
21、s454,执行无位置进挡控制;
22、s455,驻车取力结束。
23、如上所述的商用车amt挡位控制方法,其中,可选的是,步骤s452包括以下步骤:
24、s4521,判断取力器是否为转速模式,如果是,执行步骤s4522,如果否执行步骤s453;
25、s4522,以设定的减速度降速,直到转速低于设定转速;
26、s4523,切换至扭矩模式,并执行步骤s453。
27、如上所述的商用车amt挡位控制方法,其中,可选的是,当执行行车取力时,步骤s45包括:
28、s451’,判断是否存在行车取力请求,如果是,执行步骤s452’,如果否,执行步骤s453’;
29、s452’,执行行车取力油门扭矩控制;
30、s453’,结束行车取力。
31、如上所述的商用车amt挡位控制方法,其中,可选的是,步骤s452’包括以下步骤:
32、s4521’,判断取力器结合前是否回空挡;如是,执行步骤s4523’,如果否,执行步骤s4522’;
33、s4522’,执行无位置回空挡控制;
34、s4523’,判断取力器是否结合,如果是,执行步骤s4525’,如果否,执行步骤s4524’;
35、s4524’,执行取力器结合控制;
36、s4525’,判断是否在挡,如果是,执行步骤s4527’;如果是,执行步骤s4526’;
37、s4526’,执行无位置进挡控制;
38、s4527’,执行行车取力油门扭矩控制。
39、如上所述的商用车amt挡位控制方法,其中,可选的是,s453’包括:
40、s4531’,判断取力器分离前是否回空挡;如果是,执行步骤s4533’;如果否,执行步骤s4532’;
41、s4532’,执行无位置回空挡控制;
42、s4533’,判断取力器是否已分离;如果是,执行步骤s4535’;如果否,执行步骤s4534’;
43、s4534’,执行取力器分离控制;
44、s4535’,判断是否在挡;如果是执行步骤s4537’;如果否,执行步骤s4536’;
45、s4536’,执行无位置进挡控制;
46、s4537’,行车取力结束。
47、如上所述的商用车amt挡位控制方法,其中,可选的是,所述取力器分离控制包括,
48、判断取力器是否已分离;如果是,退出取力器分离控制,执行下一步骤;如果否,更新分离抖动扭矩,直到取力器分离。
49、如上所述的商用车amt挡位控制方法,其中,可选的是,无位置进挡控制包括,
50、循环更新进挡辅助扭矩和拔挡力,直到转速绝对值大于设定转速,确认在空挡。
51、如上所述的商用车amt挡位控制方法,其中,可选的是,无位置回空挡控制包括,
52、循环更新结合抖动扭矩控制取力器结合,直到反馈结合。
53、如上所述的商用车amt挡位控制方法,其中,可选的是,取力器结合控制包括,
54、判断取力器是否结合,并在未结合时循环更新结合抖动扭矩,直到反馈已结合。
55、与现有技术相比,本发明在复杂工况种基于pto工作状态进行挡位控制,在非pto工况变速箱锁定在挡无动作,从而避免位置反馈干扰导致挡位反馈错误或误动作,并省去因挡位需求变动控制换挡机构动作;在pto工况使用无位置反馈实现进退挡控制,并与pto控制流程相结合,巧妙解决了高磁环境基于位置反馈挡位控制失效阻碍pto应用的难题,并在不变更变速箱结构和增加外部控制装置的前提下,减少了解决方案成本,提升了车辆对环境的适应能力,可在多个amt变速箱型号上实现标准化平台控制。
技术特征:
1.一种商用车amt挡位控制方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的商用车amt挡位控制方法,其特征在于:步骤s3为,获取车辆需求挡位,并按所述车辆需求挡位,以直驱的方式控制扭矩输出;
3.根据权利要求2所述的商用车amt挡位控制方法,其特征在于:步骤s4包括,
4.根据权利要求3所述的商用车amt挡位控制方法,其特征在于:当执行结束驻车取力时,步骤s45包括,
5.根据权利要求4所述的商用车amt挡位控制方法,其特征在于:步骤s452包括以下步骤:
6.根据权利要求5所述的商用车amt挡位控制方法,其特征在于:当执行行车取力时,步骤s45包括:
7.根据权利要求6所述的商用车amt挡位控制方法,其特征在于:步骤s452’包括以下步骤:
8.根据权利要求6所述的商用车amt挡位控制方法,其特征在于:s453’包括:
9.根据权利要求6所述的商用车amt挡位控制方法,其特征在于:所述取力器分离控制包括,
10.根据权利要求6所述的商用车amt挡位控制方法,其特征在于:无位置进挡控制包括,
11.根据权利要求6所述的商用车amt挡位控制方法,其特征在于:无位置回空挡控制包括,
12.根据权利要求6所述的商用车amt挡位控制方法,其特征在于:取力器结合控制包括,
技术总结
本发明公开了一种商用车AMT挡位控制方法,其中,包括以下步骤,S1,获取由手动触发的信号后,进入无位置挡位控制模式;S2,判断取力器是否工作,如果是,执行步骤S4;如果否,执行步骤S3;S3,判断车辆需求挡位,并根据需求挡位输出对应的扭矩;S4,由变速箱控制器执行取力控制。本发明能够解决在高磁环境下反馈挡位控制失效阻碍PTO应用的难题。
技术研发人员:陆海峰,杨金聪,田好
受保护的技术使用者:特百佳动力科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!