一种可对任意方位探查的位置检测器及其检测方法与流程
本发明涉及位置检测器,具体涉及一种可对任意方位探查的位置检测器及其检测方法。
背景技术:
1、激光跟踪仪作为一种位置检测的设备,激光跟踪仪是一种利用激光技术进行目标跟踪的仪器。它通过发射激光束,将激光束照射到目标上,然后接收目标反射回来的激光信号,通过对这些信号的处理,可以确定目标的位置、速度和运动轨迹等信息。是一种高精度、高可靠性的目标跟踪设备。
2、例如中国专利cn102519361 b公开的一种激光跟踪仪专用工作台及激光跟踪测量方法,其通过:它包括与激光跟踪仪的底座相匹配的安装座,以及用于调整该安装座的垂直角度调整装置、水平角度调整装置、水平平移调整装置和上下升降调整装置,实现了激光跟踪仪的垂直角度调节与水平角度调节。
3、但是,该装置存在不具备调平功能而影响激光跟踪仪的使用。
4、基于此,本发明设计了一种可对任意方位探查的位置检测器及其检测方法以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种可对任意方位探查的位置检测器及其检测方法。
2、为实现以上目的,本发明通过以下技术方案予以实现:
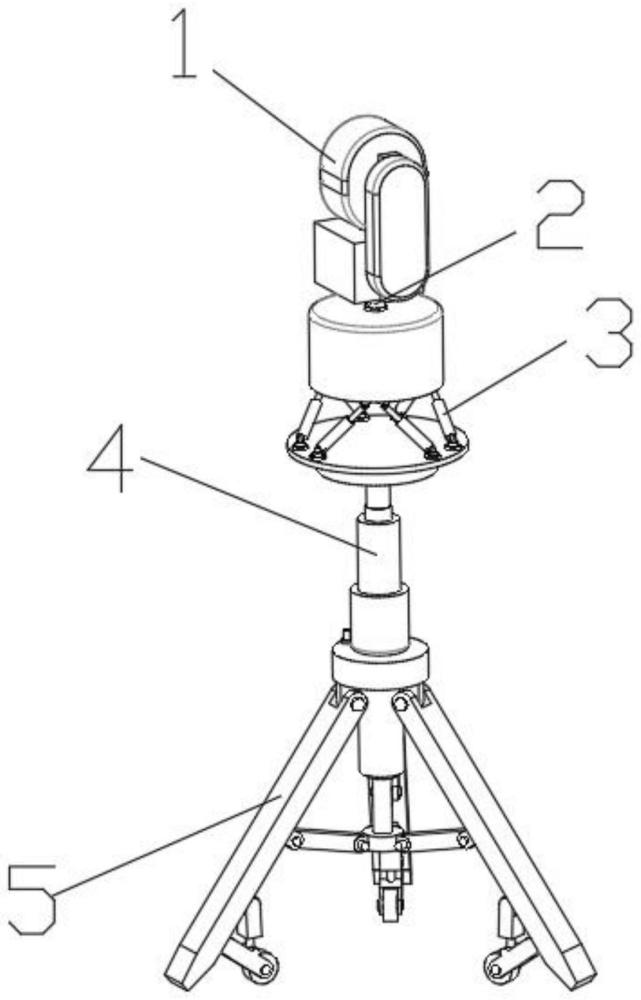
3、一种可对任意方位探查的位置检测器,包括位置检测器主体,所述位置检测器主体上安装有万向调节组件、自动调平组件和伸缩调节检测组件,所述伸缩调节检测组件可拆卸连接有可拆卸电动支撑移动组件;
4、所述万向调节组件包括第一驱动组件、第二驱动组件和转向组件,所述第一驱动组件、第二驱动组件和转向组件均与位置检测器主体连接,所述第一驱动组件和第二驱动组件连接,第一驱动组件、第二驱动组件均与转向组件连接,第一驱动组件、第二驱动组件均驱动转向组件转动。
5、更进一步的,所述位置检测器主体包括激光追踪器、安装台、第一壳体、第二壳体、第三壳体和安装块,所述激光追踪器与转向组件连接,所述安装台和第一壳体之间通过自动调平组件连接,安装台与伸缩调节检测组件连接,所述第一壳体和第一驱动组件、第二驱动组件连接,所述第二壳体、第三壳体均与转向组件连接,所述安装块安装于第一壳体上,安装块与第二驱动组件连接。
6、更进一步的,所述第一驱动组件包括第一电机、第一蜗杆、第一蜗轮和转杆,所述第一电机固定安装于安装台的内端,所述第一蜗杆和第一电机的输出端固定连接,所述第一蜗杆与第一蜗轮啮合连接,所述第一蜗轮和转杆固定固定连接,所述转杆与转向组件连接。
7、更进一步的,所述第二驱动组件包括第二电机、第二蜗杆、第二蜗轮和套管,所述第二电机固定安装于安装台的内端,所数据第二蜗杆与第二电机的输出端固定连接,所述第二蜗杆和第二蜗轮啮合连接,所述第二蜗轮与套管固定连接,所述套管与转杆转动连接,套管与安装块的通槽转动连接。
8、更进一步的,所述转向组件包括安装架、第一转轴、第二转轴、皮带轮组件、主锥齿轮和从锥齿轮,所述第一壳体、第二壳体均固定安装于安装架上,安装架与套管固定连接,第一转轴、第二转轴均与安装架转动连接,所述第一转轴、第二转轴之间通过皮带轮组件传动连接,所述主锥齿轮固定安装于转杆上,所述从锥齿轮固定安装于第一转轴上,从锥齿轮与主锥齿轮啮合连接,所述第二转轴与激光追踪器固定连接。
9、更进一步的,所述自动调平组件包括第一电动推杆和水平传感器,所述第一电动推杆、水平传感器,所述安装台和第一壳体之间设有六个第一电动推杆并沿安装台的周向分布,所述第一电动推杆的输出端与第一壳体的下端铰接,所述第一电动推杆的下端与安装台的上端铰接;所述水平传感器固定安装于安装台的下端。
10、更进一步的,所述伸缩调节检测组件包括电动绳伸缩器、安装座和连接槽,所述电动绳伸缩器固定安装于安装座上,所述电动绳伸缩器的输出端与安装台的下端固定连接,所述安装座的下端开设有连接槽,所述连接槽与可拆卸电动支撑移动组件连接。
11、更进一步的,所述可拆卸电动支撑移动组件包括拆卸组件、电动支撑组件和移动组件,所述拆卸组件与连接槽连接,所述电动支撑组件安装于拆卸组件上,所述移动组件安装于电动支撑组件上。
12、更进一步的,所述拆卸组件包括连接柱和固定台,所述连接柱固定安装于固定台上,连接柱与连接槽螺纹连接,所述固定台与电动支撑组件连接;
13、所述电动支撑组件包括第二电动推杆、支撑块、支撑架和第一连杆,所述第二电动推杆固定安装于固定台的下端,所述第二电动推杆的输出端与支撑块固定连接,所述支撑架与第二电动推杆铰接,所述第一连杆的一端与支撑架铰接,第一连杆的另一端与支撑块铰接;
14、所述移动组件包括推拉式电磁铁、第二连杆和万向滚轮,所述推拉式电磁铁、第二连杆均与支撑架铰接,所述推拉式电磁铁的输出端与第二连杆铰接,所述第二连杆与万向滚轮固定连接。
15、为了更好地实现本发明的目的,本发明还提供了一种可对任意方位探查的位置检测器及其检测方法,包括以下步骤:
16、一种如权利要求所述的可对任意方位探查的位置检测器及其检测方法,包括以下步骤:
17、步骤一,当激光追踪器追踪与其配合使用的识别器时,当激光追踪器竖向转动时,第一电机驱动第一蜗杆转动,第一蜗杆驱动第一蜗轮转动,第一蜗轮驱动带动转杆转动,转杆带动主锥齿轮转动,主锥齿轮带动从锥齿轮转动,从锥齿轮带动第一转轴转动,第一转轴通过皮带轮组件带动第二转轴转动,第二转轴带动激光追踪器转动;
18、步骤二,当激光追踪器横向转动,第二电机、第一电机同时启动并保持相同速率,此时第二电机驱动第二蜗杆转动,第二蜗杆驱动第二蜗轮转动,第二蜗轮驱动套管转动,套管带动转向组件绕其中轴线转动,由于主锥齿轮和从锥齿轮同时绕彼此转动保持相对静止,此时转向组件带动激光追踪器横向转动;
19、步骤三,当需要调平时,水平传感器检测第一壳体是否水平,六个第一电动推杆根据水平传感器检测到的第一壳体的倾斜数据调节,保持第一壳体的水平,从而保持激光追踪器的水平;
20、步骤四,当需要调节激光追踪器的高度时,启动电动绳伸缩器,电动绳伸缩器带动安装台调节高度,安装台带动第一壳体、第二壳体和激光追踪器的高度调节;
21、步骤五,当安装可拆卸电动支撑移动组件时,通过连接柱与连接槽螺纹连接,实现可拆卸电动支撑移动组件的安装,当需要调节可拆卸电动支撑移动组件的支持称以保持设备的稳定时,通过启动第二电动推杆带动支撑块运动,支撑块带动第一连杆运动,第一连杆带动支撑架绕支撑块转动从而调节支撑架相对支撑块的夹角;
22、步骤六,当移动位置检测器主体时,通过推拉式电磁铁推动第二连杆运动,第二连杆绕支撑架转动,第二连杆带动万向滚轮与地面接触。
23、本发明具有以下技术效果:
24、本发明使用时,通过,第一驱动组件、第二驱动组件带动转向组件运动,转向组件带动位置检测器主体的检测端垂直运动、水平运动,通过自动调平组件实现了位置检测器主体的自动调平;通过伸缩调节检测组件实现位置检测器主体的高度调节,通过可拆卸电动支撑移动组件实现了位置检测器主体的支持和移动同时便于拆卸。
- 还没有人留言评论。精彩留言会获得点赞!