一种负压吸附爬行机器人曲面自适应的密封结构的制作方法
本发明涉及爬行机器人吸盘,具体为一种负压吸附爬行机器人曲面自适应的密封结构。
背景技术:
1、爬壁机器人是移动机器人的一个重要分支,又称壁面移动机器人,是指能够在垂直墙壁上攀爬并完成工作的机器人。爬壁机器人具有自动化程度高、能够代替人完成特殊场合下作业的特点,因此近些年成为国内外学者的研究热点。典型应用场景为代替人的高空作业,如高楼的清洁作业、大型油罐的喷漆及检测探伤、大型船舶除锈和桥梁检测等,爬壁机器人有望将人类从这些重复、危险的劳动作业中解放出来;
2、如cn217102073u一种电动产生负压的吸盘,包括吸盘,吸盘底部包覆有膜片,所述膜片具有柔性,膜片内侧连接有拉杆,所述拉杆经过吸盘内腔贯穿到吸盘上方,所述拉杆上端连接到拉升机构,当吸盘压紧膜片紧贴平面物体时,拉升机构拉动拉杆向上运动使膜片向内腔延伸从而使膜片与平面物体之间形成负压。本发明的目的在于提供一种电动产生负压的吸盘,其使用过程中不需要配套真空泵或风机作为真空、负压源,且无需通过管道、电子阀实现控制吸盘吸取和放下物料,提高了吸盘的真空度和吸附力,能够满足在表面光洁度好的墙壁、玻璃幕墙等的吸附需求,方便机器人爬壁设计;
3、现有的爬壁机器人的吸盘大多只能满足爬壁机器人在平面上进行运动,但在正反曲面上进行运动时由于弧度的产生吸盘边缘不能完全对爬行面产生贴合,从而导致真空源在进行抽取时不能保证内外压强形成较强的差值,从而无法提供吸附力。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种负压吸附爬行机器人曲面自适应的密封结构,具备在曲面上进行吸附行进等优点,解决了上述技术问题。
3、(二)技术方案
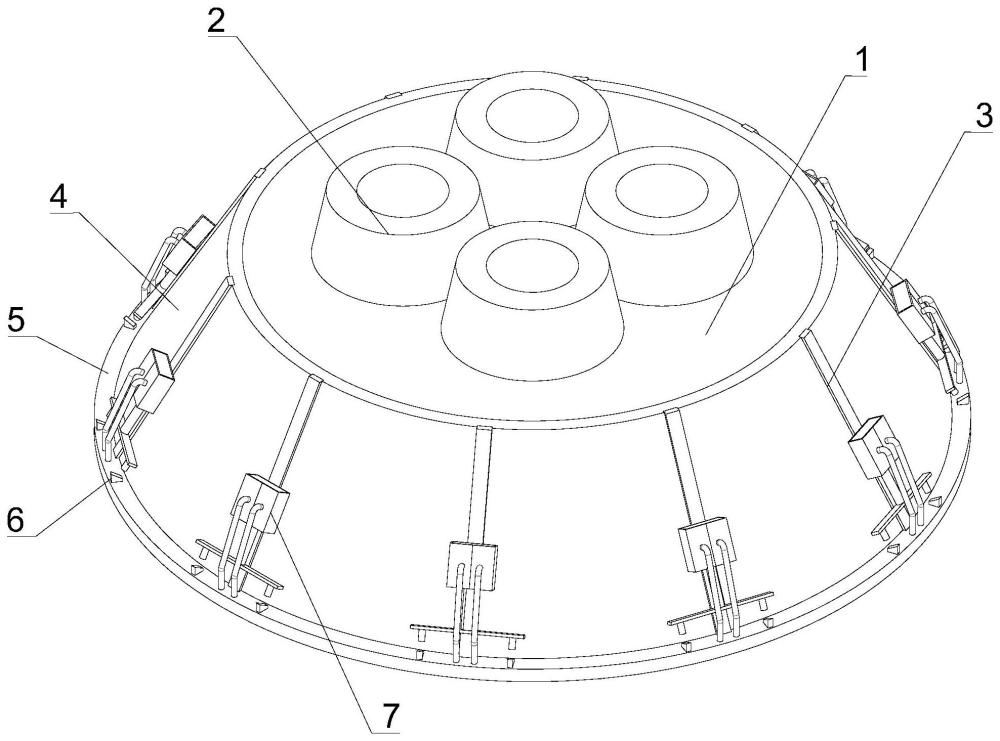
4、为实现上述目的,本发明提供如下技术方案:一种负压吸附爬行机器人曲面自适应的密封结构,包括吸盘顶盖,所述吸盘顶盖顶面中端等距连接有多个真空源,所述吸盘顶盖外端等距连接有多个支架,所述吸盘顶盖底面边缘连接有吸盘体,所述吸盘体末端外圈边缘均与支架连接,所述吸盘体外端面末尾连接有密封边缘,所述密封边缘底面对应支架开设多个凹槽,且凹槽内设置有对曲面吸附行走过程中进行密封的密封结构,所述密封边缘底面的每一个相邻凹槽之间开设有圆槽,且圆槽内连接有对运动状态进行判断的触发结构,所述支架顶端连接有用于对密封结构进行辅助密封和供能的驱动部件,所述密封边缘顶面邸驱动部件设置有支撑块。
5、作为本发明的优选技术方案,所述吸盘体底面与密封边缘底面平齐,所述吸盘体材质为耐撕裂的高柔性材质进行制作,所述密封边缘为底面光滑的耐磨损的弹性材料制成的环状结构。
6、作为本发明的优选技术方案,所述触发结构包括触发块、弹簧和触发顶针,所述触发块底面为半球形,且外端面为柱形,并滑动连接于密封边缘圆槽内部,所述弹簧固定安装于触发块末端,且另一端连接于密封边缘圆槽内壁顶端,所述触发顶针固定安装于密封边缘内壁顶面中端。
7、作为本发明的优选技术方案,所述触发块顶面中端对应触发顶针开设有让触发块和触发顶针产生电连接的插入点,所述触发块与触发顶针之间产生触发时,触发块底面的球形的最低点与密封边缘底面平齐。
8、通过上述技术方案,触发结构在平面上进行爬行时触发块的半球形底面与平面接触,且被顶在密封边缘内部,此时触发顶针完全插入触发块顶面的插入点,从而保证了其不被触发,在曲面上进行行驶时,由于弧度的产生,部分触发块底面不会与平面接触,此时弹簧向外弹出,进而破坏了触发顶针和触发块之间的电连接状态,进而将电信号传导至驱动部件,从而通过驱动部件启动密封结构,让密封结构向外膨胀直到将触发块顶入到密封边缘内部,从而完成了对吸盘体边缘未接触部分的密封。
9、作为本发明的优选技术方案,所述密封结构包括气囊和接触层,所述密封边缘底面开设的槽壁两侧向均朝向触发结构存在相同长度的延伸,所述气囊顶面固定安装于密封边缘底面槽内,所述气囊底面连接有接触层,所述接触层为弹性材料制成的薄片层。
10、作为本发明的优选技术方案,所述驱动部件包括第一气泵、电源、连接气管、第二气泵、伸缩杆和移动支架。
11、作为本发明的优选技术方案,所述第一气泵和第二气泵均固定安装于支架顶端,所述第一气泵和第二气泵均通过连接气管与气囊内部产生连通,所述第一气泵和第二气泵的工作方向相反。
12、作为本发明的优选技术方案,所述第一气泵和第二气泵顶端均连接有电源,所述电源为ups供电电源,所述电源还与伸缩杆之间存在电连接。
13、作为本发明的优选技术方案,所述伸缩杆固定安装于支架顶端,且处于第一气泵和第二气泵的下方区域,所述伸缩杆末端固定安装有移动支架,所述移动支架两侧末端均存在凸起。
14、作为本发明的优选技术方案,所述支撑块设置有多个,且每两个支撑块为一组,并与移动支架两端的凸起对应,所述支撑块顶面倾斜,且与移动支架的运动方向垂直,所述支撑块固定安装于密封边缘顶端。
15、与现有技术相比,本发明提供了一种负压吸附爬行机器人曲面自适应的密封结构,具备以下有益效果:
16、1、本发明通过在曲面上进行行驶时,由于弧度的产生,部分触发块底面不会与平面接触,此时弹簧向外弹出,进而破坏了触发顶针和触发块之间的电连接状态,进而将电信号传导至驱动部件,从而通过驱动部件启动密封结构,让密封结构向外膨胀直到将触发块顶入到密封边缘内部,从而完成了对吸盘体边缘未接触部分的密封。
17、2、本发明通过触发结构断开连接后,启动其相邻位置的两个的驱动部件,此时第一气泵向着气囊内部充气,从而让气囊向外膨胀,同时在气囊充满后,由于第一气泵与ups电源连接,从而保证了第一气泵的功能独立,且始终处于工作状态,从而保证了气囊始终充满气,保证了真空源吸附的时候气囊不会变瘪,从而避免了爬壁机器人发生掉落的情况发生。
技术特征:
1.一种负压吸附爬行机器人曲面自适应的密封结构,包括吸盘顶盖(1),所述吸盘顶盖(1)顶面中端等距连接有多个真空源(2),其特征在于:所述吸盘顶盖(1)外端等距连接有多个支架(3),所述吸盘顶盖(1)底面边缘连接有吸盘体(4),所述吸盘体(4)末端外圈边缘均与支架(3)连接,所述吸盘体(4)外端面末尾连接有密封边缘(5),所述密封边缘(5)底面对应支架(3)开设多个凹槽,且凹槽内设置有对曲面吸附行走过程中进行密封的密封结构(8),所述密封边缘(5)底面的每一个相邻凹槽之间开设有圆槽,且圆槽内连接有对运动状态进行判断的触发结构(9),所述支架(3)顶端连接有用于对密封结构(8)进行辅助密封和供能的驱动部件(7),所述密封边缘(5)顶面邸驱动部件(7)设置有支撑块(6)。
2.根据权利要求1所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述吸盘体(4)底面与密封边缘(5)底面平齐,所述吸盘体(4)材质为耐撕裂的高柔性材质进行制作,所述密封边缘(5)为底面光滑的耐磨损的弹性材料制成的环状结构。
3.根据权利要求1所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述触发结构(9)包括触发块(901)、弹簧(902)和触发顶针(903),所述触发块(901)底面为半球形,且外端面为柱形,并滑动连接于密封边缘(5)圆槽内部,所述弹簧(902)固定安装于触发块(901)末端,且另一端连接于密封边缘(5)圆槽内壁顶端,所述触发顶针(903)固定安装于密封边缘(5)内壁顶面中端。
4.根据权利要求3所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述触发块(901)顶面中端对应触发顶针(903)开设有让触发块(901)和触发顶针(903)产生电连接的插入点,所述触发块(901)与触发顶针(903)之间产生触发时,触发块(901)底面的球形的最低点与密封边缘(5)底面平齐。
5.根据权利要求1所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述密封结构(8)包括气囊(801)和接触层(802),所述密封边缘(5)底面开设的槽壁两侧向均朝向触发结构(9)存在相同长度的延伸,所述气囊(801)顶面固定安装于密封边缘(5)底面槽内,所述气囊(801)底面连接有接触层(802),所述接触层(802)为弹性材料制成的薄片层。
6.根据权利要求5所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述驱动部件(7)包括第一气泵(701)、电源(702)、连接气管(703)、第二气泵(704)、伸缩杆(705)和移动支架(706)。
7.根据权利要求6所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述第一气泵(701)和第二气泵(704)均固定安装于支架(3)顶端,所述第一气泵(701)和第二气泵(704)均通过连接气管(703)与气囊(801)内部产生连通,所述第一气泵(701)和第二气泵(704)的工作方向相反。
8.根据权利要求7所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述第一气泵(701)和第二气泵(704)顶端均连接有电源(702),所述电源(702)为ups供电电源,所述电源(702)还与伸缩杆(705)之间存在电连接。
9.根据权利要求8所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述伸缩杆(705)固定安装于支架(3)顶端,且处于第一气泵(701)和第二气泵(704)的下方区域,所述伸缩杆(705)末端固定安装有移动支架(706),所述移动支架(706)两侧末端均存在凸起。
10.根据权利要求9所述的一种负压吸附爬行机器人曲面自适应的密封结构,其特征在于:所述支撑块(6)设置有多个,且每两个支撑块(6)为一组,并与移动支架(706)两端的凸起对应,所述支撑块(6)顶面倾斜,且与移动支架(706)的运动方向垂直,所述支撑块(6)固定安装于密封边缘(5)顶端。
技术总结
本发明涉及爬行机器人吸盘技术领域,且公开了一种负压吸附爬行机器人曲面自适应的密封结构,包括吸盘顶盖,密封边缘底面的每一个相邻凹槽之间开设有圆槽,且圆槽内连接有对运动状态进行判断的触发结构,支架顶端连接有用于对密封结构进行辅助密封的驱动部件,密封边缘顶面邸驱动部件设置有支撑块。该负压吸附爬行机器人曲面自适应的密封结构通过在曲面上进行行驶时,由于弧度的产生,部分触发块底面不会与平面接触,此时弹簧向外弹出,进而破坏了触发顶针和触发块之间的电连接状态,进而将电信号传导至驱动部件,从而通过驱动部件启动密封结构,让密封结构向外膨胀直到将触发块顶入到密封边缘内部,从而完成了对吸盘体边缘未接触部分的密封。
技术研发人员:柴建伟,赵斌,窦方兴,毛红奎
受保护的技术使用者:奥克福(北京)机器人科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!