低温截止阀启闭扭矩智能控制系统及方法与流程
本发明涉及低温截止阀,具体而言,尤其涉及一种低温截止阀启闭扭矩智能控制系统及方法。
背景技术:
1、启闭力矩是指阀门开启或关闭所必须施加的力矩,是阀门在介质压力作用下动作的一项综合技术指标。例如:关闭阀门时,需要使阀瓣密封面之间形成一定的密封比压,同时还要克服阀杆与填料之间、阀杆与螺母的螺纹之间、阀杆端部支撑处及其他摩擦部位的摩擦力,因而必须施加一定的关闭力矩。
2、如果低温截止阀的流通介质为液化天然气(-162.5℃),由于低温截止阀输送介质的物理特性以及工况条件的复杂性,为了实现安全密封,低温截止阀在超低温和高温条件下启闭需要施加较大的扭矩,但是低温截止阀在启闭过程中,所需要的启闭扭矩是变化的。
3、然而,目前低温截止阀依靠施加固定扭矩实现启闭,而低温截止阀只有在开启和关闭的瞬间才需要较大扭矩,会导致低温截止阀在持续的过大扭矩作用下,零件之间过度磨损提前发生疲劳损坏,甚至严重时发生阀瓣卡死等状况,造成阀门后续维修困难。
4、有鉴于此,本发明提供了一种低温截止阀启闭扭矩智能控制系统及方法。
技术实现思路
1、根据上述提出的不足,而提供一种低温截止阀启闭扭矩智能控制系统及方法。本发明主要利用将开启过程和关闭过程分段,分别计算每一阶段所需的扭矩,plc通过伺服驱动器驱动伺服电机在每一阶段施加相应的扭矩,从而实现智能控制。
2、本发明采用的技术手段如下:
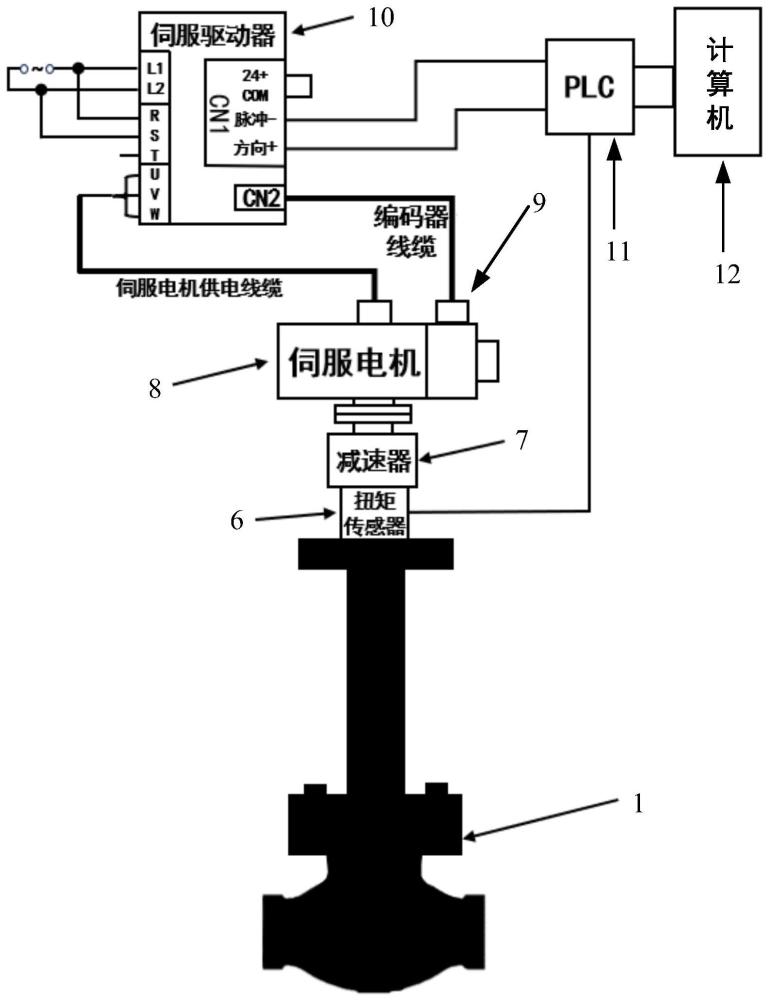
3、一方面,本发明提供了一种低温截止阀启闭扭矩智能控制系统,包括:
4、低温截止阀;
5、减速器,一端连接伺服电机,另一端连接所述低温截止阀的阀杆;
6、所述伺服电机,一端连接所述减速器,另一端连接伺服驱动器;
7、plc,与所述伺服驱动器连接;
8、计算机,与所述plc连接;
9、编码器,设置于所述伺服电机的驱动轴处,与所述伺服驱动器连接。
10、进一步地,还包括:
11、扭矩传感器,设置于所述低温截止阀的所述阀杆处,与所述plc连接。
12、另一方面,本发明还提供了一种低温截止阀启闭扭矩智能控制方法,应用上述任一项所述的低温截止阀启闭扭矩智能控制系统,包括:
13、低温截止阀包括开启阶段和关闭阶段,所述开启阶段包括第一阶段和第二阶段,所述关闭阶段包括第三阶段和第四阶段,计算所述第一阶段的第一扭矩、所述第二阶段的第二扭矩、所述第三阶段的第三扭矩、所述第四阶段的第四扭矩;
14、计算机将所述第一阶段对应所述第一扭矩、所述第二阶段对应所述第二扭矩、所述第三阶段对应所述第三扭矩、所述第四阶段对应所述第四扭矩输入plc;
15、开启所述低温截止阀时,在所述第一阶段,所述plc控制伺服驱动器驱动伺服电机向所述低温截止阀的阀杆提供所述第一扭矩;当编码器感应所述低温截止阀的阀瓣的运动距离超过第一阈值,进入所述第二阶段;在所述第二阶段,所述plc控制所述伺服驱动器驱动所述伺服电机向所述低温截止阀的所述阀杆提供所述第二扭矩;
16、关闭所述低温截止阀时,在所述第三阶段,所述plc控制所述伺服驱动器驱动所述伺服电机向所述低温截止阀的所述阀杆提供所述第三扭矩;当所述编码器感应所述低温截止阀的阀瓣的运动距离超过第二阈值,进入所述第四阶段;在所述第四阶段,所述plc控制所述伺服驱动器驱动所述伺服电机向所述低温截止阀的所述阀杆提供所述第四扭矩。
17、进一步地,所述计算所述第一阶段的第一扭矩、所述第二阶段的第二扭矩、所述第三阶段的第三扭矩、所述第四阶段的第四扭矩,包括:
18、计算所述第一阶段的阀杆总轴向力、所述第二阶段的阀杆总轴向力、所述第三阶段的阀杆总轴向力、所述第四阶段的阀杆总轴向力;
19、根据所述第一阶段的阀杆总轴向力计算所述第一扭矩、根据所述第二阶段的阀杆总轴向力计算所述第二扭矩、根据所述第三阶段的阀杆总轴向力计算所述第三扭矩、根据所述第四阶段的阀杆总轴向力计算所述第四扭矩。
20、进一步地,所述第一阶段的阀杆总轴向力、所述第二阶段的阀杆总轴向力、所述第三阶段的阀杆总轴向力、所述第四阶段的阀杆总轴向力,按照以下公式计算:
21、q1=qmf-qmj+qt sinα
22、q2=λqmj+qt sinα
23、q3=qmf+λqmj+qtsinα
24、q4=-qmj+qtsinα
25、其中,q1为所述第一阶段的阀杆总轴向力,qmf为密封力,qmj为介质力,λ为沿所述阀杆的延伸方向上,所述阀瓣在最高液位处的表面积与沿所述阀杆的延伸方向上,所述阀瓣在最低液位处的表面积的差值,qt为摩擦力,α为所述阀杆的螺纹的升角,q2为所述第二阶段的阀杆总轴向力,q3为所述第三阶段的阀杆总轴向力,q4为所述第四阶段的阀杆总轴向力。
26、进一步地,所述密封力,按照以下方式计算:
27、qmf=πdmpbmqmf
28、其中,dmp为所述阀瓣的密封面的平均直径,bm为所述阀瓣的密封面的宽度,qmf为密封必须比压。
29、进一步地,所述密封必须比压,按照以下方式计算:
30、
31、其中,pn为公称压力。
32、进一步地,所述介质力,按照以下方式计算:
33、
34、其中,dmp为所述阀瓣的密封面的平均直径,p为计算压力,p=pn,pn为公称压力。
35、进一步地,所述摩擦力,按照以下方式计算:
36、qt1=πdfht1μt1p
37、qt2=πdfht2μt2p
38、qt=qt1+qt2
39、其中,qt1为所述阀杆与填料之间的摩擦力,qt2为所述阀杆与定位螺母之间的摩擦力,df为所述阀杆的直径,ht1为所述填料的高度,μt1为所述阀杆与所述填料之间的摩擦系数,p为计算压力,p=pn,pn为公称压力,ht2为所述定位螺母的高度,μt2为所述阀杆与所述定位螺母之间的摩擦系数。
40、进一步地,计算所述低温截止阀的最大许用扭矩;
41、所述计算机将所述最大需用扭矩输入所述plc;
42、扭矩传感器实时采集所述阀杆的扭矩并传输至所述plc,当所述plc判断所述阀杆的扭矩大于所述最大许用扭矩时,所述plc控制所述伺服驱动器停止驱动所述伺服电机并报警。
43、较现有技术相比,本发明具有以下优点:
44、1、本发明提供的低温截止阀启闭扭矩智能控制系统及方法,plc通过伺服驱动器控制伺服电机施加变化的扭矩对低温截止阀进行启闭,避免了启闭时,持续大扭矩的作用于低温截止阀,导致低温截止阀过早发生疲劳损坏和阀瓣卡死等问题。
45、2、本发明提供的低温截止阀启闭扭矩智能控制系统及方法,在保证正常启闭低温截止阀的前提下,最大程度的实现了省力节能,且能够实现在低温截止阀应用全过程启闭的扭矩实时监控与数据反馈,增加了低温截止阀的使用可靠性。
- 还没有人留言评论。精彩留言会获得点赞!