一种谐波减速机的扭矩控制方法及控制系统与流程
本发明涉及减速机控制,具体为一种谐波减速机的扭矩控制方法及控制系统。
背景技术:
1、谐波减速机是一种齿轮传动装置,通过降低转速和增大转矩来满足各种工作机械的需要,广泛运用在航空航天、航海、机械制造、交通运输等众多行业。
2、现有的用于谐波减速机的扭矩控制方面的改进,通常是用于提高谐波减速机的使用寿命,比如在发明公开号为cn116292823a的中国专利中,公开了一种谐波减速机扭矩限制系统及其控制方法,该方案就是通过设置扭矩限制系统,使谐波减速机具备过载保护功能,增加谐波减速机的使用寿命和抗风险能力,其他的用于谐波减速机的扭矩控制方面的改进,通常是对谐波减速机的设备进行优化改进,缺少在谐波减速机使用时对扭矩进行控制的改进方法,这会导致当扭矩不与预设的扭矩相符时,会导致无法准确完成减速工作或导致设备损坏等问题,鉴于此,有必要对现有的谐波减速机的扭矩控制方法进行改进。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的技术问题之一,通过对现有技术进行改进,用于解决现有技术中缺少在谐波减速机使用时对扭矩进行控制的改进方法,这会出现当扭矩不与预设的扭矩相符时,导致无法准确完成减速工作或设备损坏等问题。
2、为实现上述目的,第一方面,本发明提供一种谐波减速机的扭矩控制方法,包括:
3、在谐波减速机处于标准情况下运行时,获取谐波减速机的减速比,记为z1;
4、获取减速比为z1时谐波减速机的扭矩,记为标准扭矩;
5、使用标准比值公式获取z1与标准扭矩之间的传递效率;
6、当谐波减速机实际运行时,在谐波减速机的输入轴放置转速传感器,记为输入传感器,在谐波减速机的输出轴放置转速传感器,记为输出传感器;
7、基于输入传感器的检测结果、输出传感器的检测结果以及k1与标准扭矩之间的传递效率对谐波减速机的扭矩进行控制。
8、进一步地,在谐波减速机处于标准情况下运行时,获取谐波减速机的减速比,记为z1;获取减速比为z1时谐波减速机的扭矩,记为标准扭矩包括:
9、获取谐波减速机在标准情况下的使用效率,记为d1,获取谐波减速机在标准情况下的额定扭矩,记为标准扭矩;
10、当谐波减速机的运行条件处于标准情况下时,启动谐波减速机,将谐波减速机的电机功率记为d2,将谐波减速机的输入轴的速度比上输出轴的速度的比值记为速比,将电机功率的输入转速记为d3,使用减速器扭矩算法得到扭矩,基于计算得到的扭矩得到标准扭矩下的速比;
11、所述减速器扭矩算法为:其中,k1为速比,α1为第一减速系数,z为扭矩。
12、进一步地,在谐波减速机处于标准情况下运行时,获取谐波减速机的减速比,记为z1;获取减速比为z1时谐波减速机的扭矩,记为标准扭矩还包括:
13、在谐波减速机运行后,当电机功率提高至谐波减速机的额定功率时停止提高,当电机功率的输入转速提高至谐波减速机的预设最大转速时停止提高;
14、实时获取谐波减速机运行后的速比,记为减速比,当标准速比、电机功率以及电机功率的输入转速提高时,通过减速器扭矩算法实时获取扭矩的值;
15、当扭矩的值等于标准扭矩的值时,获取此时的减速比,记为z1。
16、进一步地,使用标准比值公式获取z1与标准扭矩之间的传递效率包括:
17、获取z1的值以及标准扭矩的值;
18、使用标准比值公式获取z1以及标准扭矩之间的传递效率;
19、所述标准比值公式为:其中,z1为减速比,z2为标准扭矩,r为传递效率。
20、进一步地,基于输入传感器的检测结果、输出传感器的检测结果以及k1与标准扭矩之间的传递效率对谐波减速机的扭矩进行控制包括:
21、在谐波减速机开始运行后,每隔第一间隔时间获取输入传感器的以及输出传感器的检测结果;
22、获取谐波减速器的预减速比以及预启动扭矩;
23、在每次获得输入传感器以及输出传感器的检测结果后,对谐波减速器的扭矩进行计算并基于计算结果进行分析;
24、基于分析结果对谐波减速器的扭矩进行控制。
25、进一步地,在谐波减速机开始运行后,每隔第一间隔时间获取输入传感器的以及输出传感器的检测结果,获取谐波减速器的预减速比以及预启动扭矩包括:
26、在谐波减速机开始运行后,获取谐波减速机的总运行时间,记为运行总时间;
27、将运行总时间的1/m记为第一间隔时间,每隔第一间隔时间获取输入传感器的以及输出传感器的检测结果,记为输入转速1至输入转速m以及输出转速1至输出转速m,其中,m为正整数;
28、获取谐波减速器的预减速比,所述预减速比为当谐波减速器的运行达到恒定时的减速比;
29、获取谐波减速器的预启动扭矩,所述预启动扭矩为谐波减速器的运行达到恒定时的扭矩。
30、进一步地,在每次获得输入传感器以及输出传感器的检测结果后,对谐波减速器的扭矩进行计算并基于计算结果进行分析包括:
31、在每次获得输入传感器以及输出传感器的检测结果后,将输出转速除以输入转速的值记为运行减速比;
32、将运行减速比代入标准比值公式中进行计算,将得到的扭矩的值记为运行扭矩;
33、当运行扭矩大于等于第一限度扭矩且小于等于第二限度扭矩时,将此时的运行扭矩记为正常扭矩,其中,第一限度扭矩为预启动扭矩乘以β1,第二限度扭矩为预启动扭矩乘以β2,β1以及β2为第一扭矩系数以及第二扭矩系数;
34、当运行扭矩小于第一限度扭矩时,将此时的运行扭矩记为弱扭矩;
35、当运行扭矩大于第二限度扭矩时,将此时的运行扭矩记为强扭矩;
36、当运行扭矩处于弱扭矩时,获取运行减速比;
37、当运行减速比小于预减速比时,获取运行扭矩以及运行减速比所在的输入转速的编号,记为m1,其中,m1为小于等于m的正整数;
38、当m1大于第一标准编号时,将谐波减速机的运行状态记为慢速状态;
39、当m1小于等于第一标准编号时,将谐波减速机的运行状态记为正常状态;
40、当运行减速比大于等于预减速比时,将谐波减速机的运行状态记为高效运行状态;
41、当运行扭矩处于正常扭矩时,获取运行减速比;
42、当运行减速比小于等于第一减速比且大于等于第二减速比时,将谐波减速机的运行状态记为正常状态;
43、第一减速比为预减速比乘以β3,第二减速比为预减速比乘以β4,其中,β3以及β4为第一减速系数以及第二减速系数;
44、当运行减速比大于第一减速比时,将谐波减速机的运行状态记为高效运行状态;
45、当运行减速比小于第二减速比时,将谐波减速机的运行状态记为低效运行状态。
46、进一步地,对谐波减速器的扭矩进行计算并基于计算结果进行分析还包括:
47、当运行扭矩处于强扭矩时,获取运行减速比;
48、当运行减速比小于预减速比时,将谐波减速机的运行状态记为低效运行状态;
49、当运行减速比大于等于预减速比时,获取运行扭矩以及运行减速比所在的输入转速的编号,记为m2,其中,m2为小于等于m的正整数;
50、当m2大于第二标准编号时,将谐波减速机的运行状态记为正常状态;
51、当m2小于等于第二标准编号时,将谐波减速机的运行状态记为高速状态。
52、进一步地,基于分析结果对谐波减速器的扭矩进行控制包括:
53、当谐波减速机的运行状态被记为慢速状态时,将电机功率以及电机功率的输出转速提高至此时的第一倍率;
54、当谐波减速机的运行状态被记为高速状态时,将电机功率以及电机功率的输出转速降低至此时的第二倍率。
55、进一步地,基于分析结果对谐波减速器的扭矩进行控制还包括:
56、当谐波减速机的运行状态被记为低效运行状态时,使用变频器提高谐波电磁线圈的频率,将谐波电磁线圈的频率提高至此时的第三倍率;
57、当谐波电磁线圈的频率被提高后谐波减速机的运行状态仍被记为低效运行状态时,在谐波减速机运行结束时发送润滑油补充信号;
58、当谐波减速机的运行状态被记为高效运行状态时,使用变频器降低谐波电磁线圈的频率,将谐波电磁线圈的频率降低至此时的第四倍率。
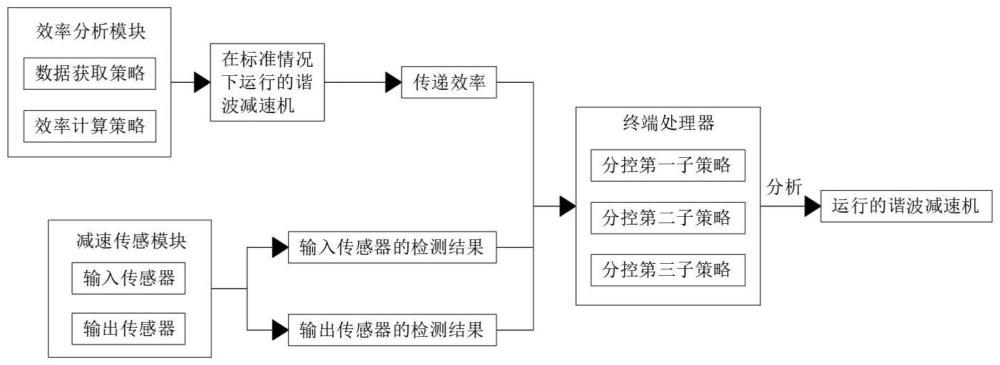
59、第二方面,本发明还提供一种谐波减速机的扭矩控制系统,包括效率分析模块、减速传感模块以及终端处理器;
60、所述效率分析模块用于在谐波减速机处于标准情况下运行时,获取谐波减速机的减速比,记为z1;获取减速比为z1时谐波减速机的扭矩,记为标准扭矩;
61、使用标准比值公式获取z1与标准扭矩之间的传递效率;
62、所述减速传感模块用于当谐波减速机实际运行时,在谐波减速机的输入轴放置转速传感器,记为输入传感器,在谐波减速机的输出轴放置转速传感器,记为输出传感器;
63、所述终端处理器用于基于输入传感器的检测结果、输出传感器的检测结果以及k1与标准扭矩之间的传递效率对谐波减速机的扭矩进行控制。
64、本发明的有益效果:本发明通过在谐波减速机处于标准情况下运行时,获取谐波减速机的减速比,并获取减速比为z1时谐波减速机的扭矩,使用标准比值公式获取z1与标准扭矩之间的传递效率,这样的好处在于,通过获取z1以及标准扭矩之间的传递效率,可以得到谐波减速机在运行时减速比与扭矩之间的数值关系,进而可以通过在谐波减速机运行时,通过获取谐波减速机的减速比,推断出谐波减速机的扭矩,有利于对谐波减速机的扭矩进行有效的控制;
65、本发明还通过当谐波减速机实际运行时,在谐波减速机的输入轴放置转速传感器,在谐波减速机的输出轴放置转速传感器,最后基于输入传感器的检测结果、输出传感器的检测结果以及k1与标准扭矩之间的传递效率对谐波减速机的扭矩进行控制,这样的好处在于,通过放置转速传感器可以对谐波减速机的减速比进行有效的监控,有利于在谐波减速机的不同运行状态下对谐波减速机进行调节进而对控制谐波减速机的扭矩。
66、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!