双模耦合驱动式汽车无动力中断换挡协同控制方法及系统
本发明属于汽车回馈控制领域,特别是涉及一种双模耦合驱动式汽车无动力中断换挡协同控制方法及系统。
背景技术:
1、发展智能电动汽车已成为汽车工业可持续发展的重要途径。根据驱动轮的动力源,现有的电动汽车驱动方式可分为两种:集中式驱动和分布式驱动。集中驱动系统工作可靠成熟,然而它需要辅助控制装置来协调驱动轮上的扭矩以用于动态控制功能,这增加了电动车辆的控制复杂性。而分布式驱动系统可以单独调节每个车轮的扭矩,有利于车辆的多维动力学控制。但同轴驱动轮缺乏扭矩自平衡机构,在复杂路况或单个驱动电机故障情况下,难以保证各轮驱动扭矩达到理想值,将严重降低行车安全性。在每个驱动轮上增加多速变速器会使动力总成复杂化,而车辆的驱动能力完全取决于驱动电机的功能特性,因此动力性和经济性都受到限制。
2、分布式驱动系统可以准确、快速的单独调节每个车轮的扭矩,有利于车辆的动力学控制。但在无动力中断换挡时会出现两侧车轮的驱动扭矩不平衡的问题,导致车辆偏离路径和稳定性变差。
技术实现思路
1、本发明的目的是提供双模耦合驱动式汽车无动力中断换挡协同控制方法及系统,以解决上述现有技术存在的问题。
2、一方面为实现上述目的,本发明提供了一种双模耦合驱动式汽车无动力中断换挡协同控制方法,包括:
3、步骤一:获取双模耦合驱动式汽车中各传感器采集的系统数据,对所述系统数据进行驾驶意图分析,得到车辆状态数据;
4、步骤二:基于所述车辆状态数据对所述双模耦合驱动式汽车是否需要进行模式切换进行判断,若不需要模式切换,则使所述双模耦合驱动式汽车继续保持当前驱动模式行驶,若需要模式切换,则执行步骤三;
5、判断过程为:若车辆处于集中式驱动模式,且实际车速小于50km/h,目标车速大于50km/h,则需要升档,若处于集中式驱动模式,且实际车速小于50km/h,目标车速小于50km/h,则不需要换挡;若处于分布式驱动模式,且实际车速大于50km/h,目标车速小于50km/h,则需要降档;若处于分布式驱动模式,且实际车速大于50km/h,目标车速大于50km/h,则不需要换挡;
6、步骤三:对所述双模耦合驱动式汽车进行无动力中断换挡;
7、步骤四:在进行无动力中断换挡的过程中通过控制转向系统消除无动力换挡过程中产生的侧向路径偏差和横摆角速度偏差,实现无动力中断换挡与转向协同控制。
8、可选的,所述车辆状态数据包括:挡位数据、加速踏板位移数据、制动踏板位移数据、方向盘转角数据、方向盘转矩数据、车身运动姿态数据、车辆位置数据、制动压力数据和变模机构角位移数据。
9、可选的,对所述双模耦合驱动式汽车进行无动力中断换挡,具体包括:无动力中断升档和无动力中断降档。
10、可选的,所述无动力中断升档的过程,具体包括:当所述双模耦合驱动式汽车的驱动模式为集中式驱动模式时,通过对先升档侧电机进行降扭使先升档侧车轮的降扭数值等于后升档侧车轮的升扭数值,并使车辆总扭矩保持不变;在对所述先升档侧电机进行降扭的过程中对所述先升档侧电机的扭矩是否降为0进行判断,若否,则继续对所述先升档侧电机进行降扭直至所述先升档侧电机的扭矩降为0,若是,则完成先升档侧的升档;
11、先升档侧完成升档后进行后升档侧的升档,具体过程包括:通过对后升档侧电机进行降扭使后升档侧车轮的降扭数值等于先升档侧车轮的升扭数值,并使车辆总扭矩保持不变;在对所述后升档侧电机进行降扭的过程中对所述后升档侧电机的扭矩是否降为0进行判断,若否,则继续对所述后升档侧电机进行降扭直至所述后升档侧电机的扭矩降为0,若是,则完成后升档侧的升档;
12、当所述后升档侧和所述先升档侧均完成升档后,所述双模耦合驱动式汽车的驱动模式由集中式驱动模式变为分布式驱动模式,完成所述双模耦合驱动式汽车的无动力中断升档。
13、可选的,所述无动力中断降档的过程,具体包括:当所述双模耦合驱动式汽车的驱动模式为集中式驱动模式时,通过对先降档侧电机进行降扭使先降档侧车轮的降扭数值等于后降档侧车轮的升扭数值,并使车辆总扭矩保持不变;在对所述先降档侧电机进行降扭的过程中对所述先降档侧电机的扭矩是否降为0进行判断,若否,则继续对所述先降档侧电机进行降扭直至所述先降档侧电机的扭矩降为0,若是,则完成先降档侧的降档;
14、先降档侧完成降档后进行后降档侧的降档,具体过程包括:通过对后降档侧电机进行降扭使后降档侧车轮的降扭数值等于先降档侧车轮的升扭数值,并使车辆总扭矩保持不变;在对所述后降档侧电机进行降扭的过程中对所述后降档侧电机的扭矩是否降为0进行判断,若否,则继续对所述后降档侧电机进行降扭直至所述后降档侧电机的扭矩降为0,若是,则完成后降档侧的降档;
15、当所述后降档侧和所述先降档侧均完成降档后,所述双模耦合驱动式汽车的驱动模式由集中式驱动模式变为分布式驱动模式,完成所述双模耦合驱动式汽车的无动力中断降档。
16、可选的,在进行无动力中断换挡的过程中通过控制转向系统消除无动力换挡过程中产生的侧向路径偏差和横摆角速度偏差,具体包括:
17、通过各所述传感器获取所述双模耦合驱动式汽车两侧车轮的驱动力矩数据,对所述两侧车轮的驱动力矩数据进行作差得到转向系统的转向力矩数据,对所述转向系统施加前馈转向力矩抵消所述转向力矩数据;
18、通过各所述传感器检测车辆横向路径偏差和车辆横摆角速度偏差,并通过反馈控制横向路径偏差和横摆角速度偏差。
19、通过各所述传感器检测车辆横向路径偏差和车辆横摆角速度偏差,然后通过两者的偏差设计反馈控制器,反馈控制器输出方向盘转角,控制车辆的路径和横摆角速度,以减小两者的偏差,最终使两者的偏差归为0。
20、另一方面为实现上述目的,本发明提供了一种双模耦合驱动式汽车无动力中断换挡协同控制系统,包括:
21、传动总成,所述传动总成的两侧均安装有驱动模块和若干车轮,位于所述传动总成的同一侧的驱动模块和车轮之间传动连接;
22、变模子系统,固定在所述传动总成的壳体上部;
23、控制模块,所述控制模块集成有协同控制器和驾驶意图解析子模块,所述协同控制器与所述变模子系统之间低压连接;
24、车辆状态传感器组,安装于双模耦合驱动式汽车车身上,且所述车辆状态传感器组与所述驾驶意图解析子模块通信连接。
25、可选的,所述驱动模块包括第一驱动电机和第二驱动电机,且所述第一驱动电机和所述第二驱动电机的花键轴与传动总成的输入轴通过联轴器相连;
26、所述第一驱动电机和所述第二驱动电机分别高压连接有驱动电机ⅰ控制器和驱动电机ⅱ控制器;
27、电池组及管理系统,所述电池组及管理系统与所述驱动电机ⅰ控制器、驱动电机ⅱ控制器和dc/dc直流斩波器之间分别通过高压连接器高压连接;
28、所述变模子系统包括:变模机构、变模电机ⅰ、变模电机ⅱ、变模电机ⅰ控制器和变模电机ⅱ控制器;
29、所述变模机构固定安装于所述传动总成上方,所述变模电机ⅰ和所述变模电机ⅱ依次设置于所述变模机构上方,所述变模电机ⅰ和所述变模电机ⅱ分别低压连接有所述驱动变模ⅰ控制器和所述变模电机ⅱ控制器,所述驱动变模ⅰ控制器和所述变模电机ⅱ控制器均与所述协同控制器低压连接。
30、可选的,所述传动总成包括:分布式减速器ⅰ、同步器ⅰ、集中式减速器ⅰ、集中式减速器ⅱ、同步器ⅱ、分布式减速器ⅱ、车轮ⅰ、半轴ⅰ、二级减速器ⅰ、二级减速器ⅱ、半轴ⅱ、车轮ⅱ和差速器;
31、所述差速器安装于所述传动总成的壳体内部,所述差速器两侧分别安装有所述集中式减速器ⅰ和所述集中式减速器ⅱ,所述集中式减速器ⅰ远离所述差速器的一侧设置有分布式减速器ⅰ,所述集中式减速器ⅱ远离所述差速器的一侧设置有分布式减速器ⅱ,所述集中式减速器ⅰ与所述分布式减速器ⅰ之间沿车辆直线行驶方向依次设置有同步器ⅰ和二级减速器ⅰ,所述集中式减速器ⅱ与所述分布式减速器ⅱ之间沿车辆直线行驶方向依次设置有同步器ⅱ和二级减速器ⅱ,所述传动总成壳体与所述车轮ⅰ之间通过半轴ⅰ传动连接,所述传动总成壳体与所述车轮ⅱ之间通过半轴ⅱ传动连接。
32、本发明的技术效果为:
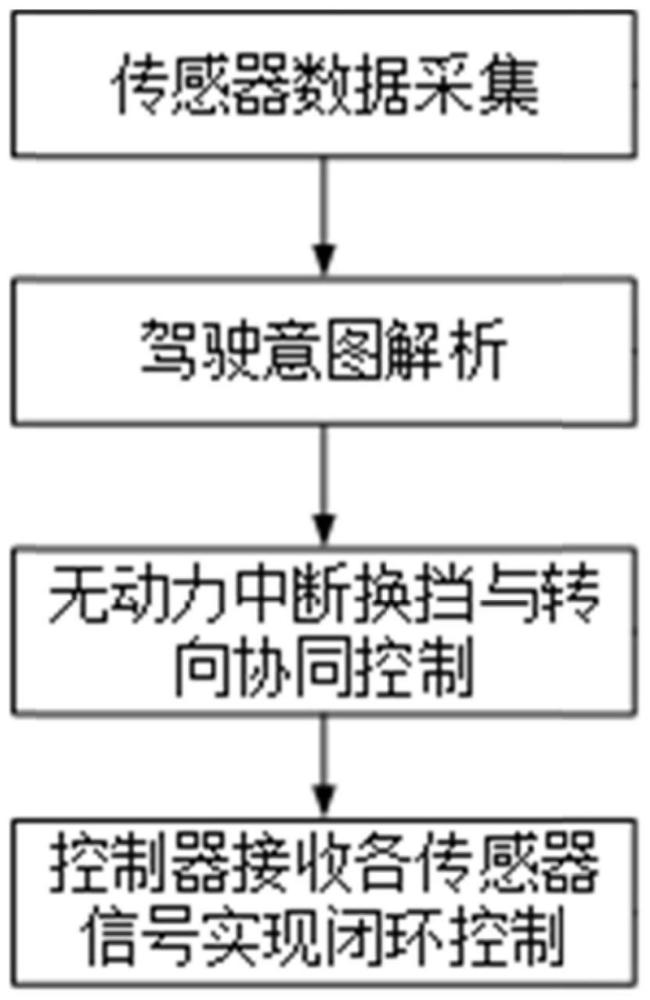
33、本发明提供的双模耦合驱动式汽车无动力中断换挡协同控制方法及系统通过与各传感器通讯来获取各子系统的信息,实现驾驶意图解析;然后,进行无动力中断换档,同时控制转向系统消除无动力换挡造成的侧向路径和横摆角速度偏差,实现无动力中断换挡与转向协同控制;最后,控制器接收各传感器信号实现闭环控制。本发明弥补了车辆换挡时动力中断问题,同时解决了无动力中断换挡产生的横向路径偏离和侧向稳定性差的问题,有效提高了双模耦合驱动纯电动汽车的行驶稳定性。解决了无动力中断换挡时会出现两侧车轮的驱动扭矩不平衡,进而导致车辆偏离路径和稳定性变差的问题。
- 还没有人留言评论。精彩留言会获得点赞!