一种机器人拖链线缆及其强度综合测试装置的制作方法
本发明涉及人工智能,具体为一种机器人拖链线缆及其强度综合测试装置。
背景技术:
1、拖链电缆是一种用于在机器人、自动化设备和数控机床等运动部件中传输电力和信号的电缆。它通常由多根细小的电线或光纤绳索组成,并用护套或护罩保护,以防止在运动时被损坏或磨损,是一种用于机器人运动系统的电缆管理解决方案,它的作用是保护电缆、电线和传感器等设备免受外部环境的损害,同时确保这些设备在机器人移动和操作过程中能够自由而稳定地工作。
2、拖链线缆设计允许其在机器人运动中自由弯曲而不损坏内部线缆。这确保机器人能够在狭窄或复杂的工作环境中自由移动,然而现有机器人拖链线缆由于单个链节结构为水平安装排列,只给予内部线缆单一水平方向的转动,无法满足机器人进行三维运动时的跟随移动,机器人可运动的空间随之减小,极大的降低了机器人的适用性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种机器人拖链线缆及其强度综合测试装置,解决了拖链线缆由于单个链节结构为水平安装排列,只给予内部线缆单一水平方向的转动,无法满足机器人进行三维运动时的跟随移动的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种机器人拖链线缆,包括线缆机构,所述线缆机构用于保护机器人外部导线,所述线缆机构的上下端均固定连接有三维转动机构,所述三维转动机构用于加大拖链线缆的三维运动空间,所述线缆机构的内部设置有伸缩机构,所述伸缩机构增大了线缆机构可保护导线空间的容积。
3、优选的,所述线缆机构包括限位环,所述三维转动机构包括伸缩杆,所述伸缩杆的一端分别固定连接在限位环的外壁上下端,所述伸缩杆的另一端转动连接有滚珠,所述滚珠转动连接有连接架,所述连接架的内部转动连接有固定杆,所述三维转动机构为对称设置,上端所述固定杆贯穿下端固定杆。
4、优选的,所述伸缩机构包括限位块,所述限位块设置在限位环的内部,所述限位块的内部左右端均开设有空腔,所述空腔的内部滑动连接有延伸块,所述限位块与延伸块的相邻一侧固定连接有多个弹簧,所述延伸块固定连接在限位环的一端。
5、优选的,上端所述限位环的内部螺纹连接有螺栓,所述螺栓的一端固定连接有转盘,所述螺栓的另一端转动连接有夹环,一端所述夹环的内部开设有空槽。
6、优选的,所述伸缩机构还包括卡槽,所述卡槽开设在延伸块的外壁上下端,所述卡槽的内部滑动连接有卡块,所述卡块固定连接在空腔的内壁一端。
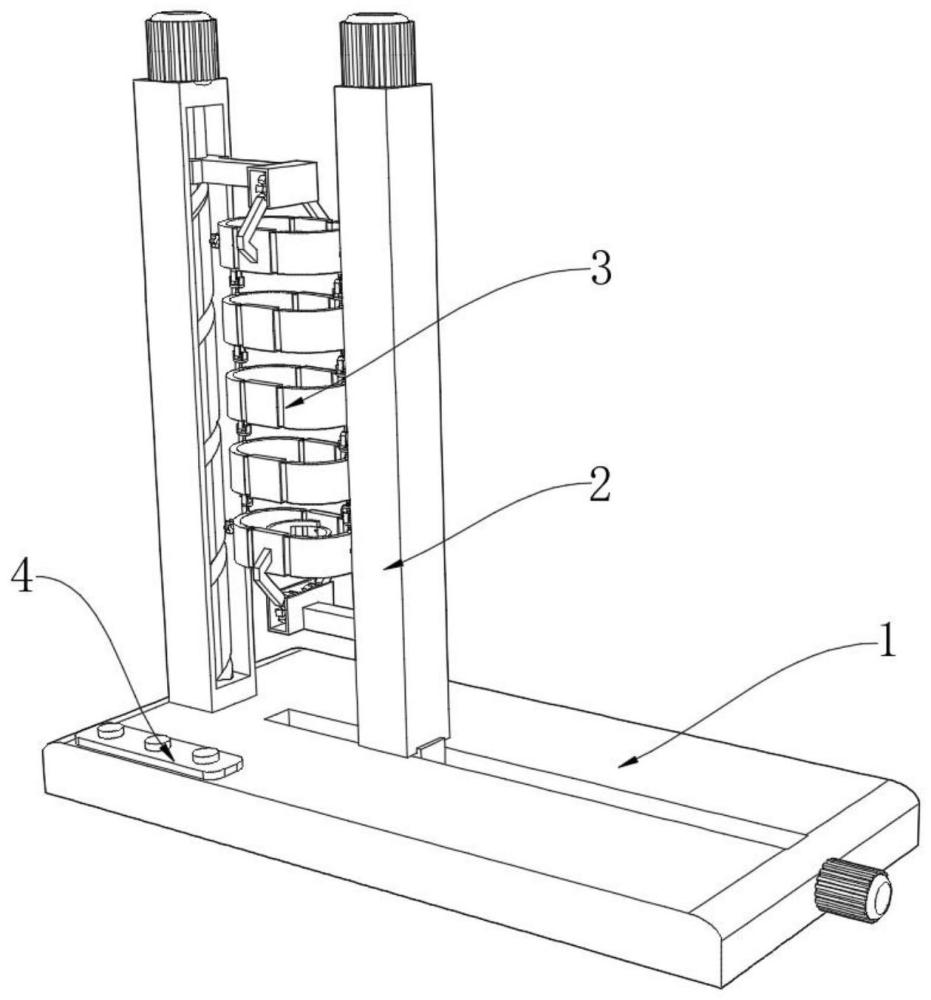
7、一种机器人拖链线缆的强度综合测试装置,包括测试台,所述测试台的顶壁左右侧均设置有夹持机构,所述夹持机构用于对拖链线缆完成夹持。
8、优选的,所述夹持机构包括移动框,所述移动框固定连接在测试台的顶壁左端,所述移动框的顶壁固定连接有第二伺服电机,所述第二伺服电机的输出端贯穿移动框并固定连接有第二螺纹杆,所述第二螺纹杆的外壁螺纹连接有延伸板,所述延伸板的一端固定连接有固定架,所述固定架的内壁前后侧均转动连接有电磁柱,所述电磁柱的外壁固定连接有齿轮,所述齿轮的外壁固定连接有夹爪,所述移动框为对称设置。
9、优选的,所述夹持机构还包括滑槽,所述滑槽开设在测试台的顶壁中部,所述测试台的外壁右侧固定连接有第一伺服电机,所述第一伺服电机的输出端贯穿测试台并固定连接有第一螺纹杆,所述第一螺纹杆的外壁螺纹连接有滑块,右端所述移动框固定连接在滑块的顶端。
10、优选的,两个所述齿轮之间啮合连接。
11、优选的,所述测试台的顶壁固定连接有开关,所述开关分别与第一伺服电机、第二伺服电机和电磁柱电性连接。
12、工作原理:两个限位环内部用于盛装导线,多个限位环通过三维转动机构连接,滚珠给予了伸缩杆跟随限位环运动时的转动空间,配合滚珠的转动运动,分别给予上下两个限位环三维运动的空间,在限位环一端倾斜后,一端伸缩杆收缩,另一端伸缩杆伸长,伸缩杆自身的伸缩作用给予限位环转动的空间,在机器人做三维运动时可保证内部线缆的实时跟随,提高了机器人可做运动的空间,同时扩大了所适配机器人的使用范围,通过开启电磁柱使自身转动,带动齿轮转动,在啮合传动下两个齿轮反向转动,分别带动两个夹爪夹持端间距的改变,通过第二伺服电机启动带动第二螺纹杆转动,反向分别转动两侧第二伺服电机,分别带动左右侧延伸板上下移动,完成对于被夹持线缆机构两端的高度改变,以此完成对线缆机构的拉伸强度测试,同时反向转动两端第二伺服电机,带动两端延伸板相互靠近,给予被夹持线缆机构两端冲击力,以此完成线缆机构的冲击强度测试,通过启动第一伺服电机,带动第一螺纹杆转动,滑块带动右端移动框左右移动,改变线缆机构的倾斜角度,多个限位环夹角随之改变,以此完成对于线缆机构弯曲强度检测。
13、本发明提供了一种机器人拖链线缆及其强度综合测试装置。具备以下有益效果:
14、1、本发明通过三维转动机构内部结构的共同作用,同时给予限位环前后左右四个水平方向的运动空间,在机器人做三维运动时可保证内部线缆的实时跟随,提高了机器人可做运动的空间,同时扩大了所适配机器人的使用范围。
15、2、本发明通过夹持机构内部机构的相互配合,实现了对于了线缆机构的强度测试,满足了对于拖链线缆的拉伸、弯曲以及冲击多种运动状态的强度测试,极大的提高了拖链线缆强度测试装置的综合性,使拖链线缆强度测试结果更加精准。
16、3、本发明通过伸缩机构中的限位块、空腔、弹簧、延伸块、卡槽和卡块之间的相互配合,实现了对于拖链线缆内部空间的增大,以此完成对于更多导线的保护。
技术特征:
1.一种机器人拖链线缆,包括线缆机构(3),其特征在于,所述线缆机构(3)用于保护机器人外部导线,所述线缆机构(3)的上下端均固定连接有三维转动机构(5),所述三维转动机构(5)用于加大拖链线缆的三维运动空间,所述线缆机构(3)的内部设置有伸缩机构(6),所述伸缩机构(6)增大了线缆机构(3)可保护导线空间的容积。
2.根据权利要求1所述的一种机器人拖链线缆,其特征在于,所述线缆机构(3)包括限位环(301),所述三维转动机构(5)包括伸缩杆(501),所述伸缩杆(501)的一端分别固定连接在限位环(301)的外壁上下端,所述伸缩杆(501)的另一端转动连接有滚珠(502),所述滚珠(502)转动连接有连接架(503),所述连接架(503)的内部转动连接有固定杆(504),所述三维转动机构(5)为对称设置,上端所述固定杆(504)贯穿下端固定杆(504)。
3.根据权利要求2所述的一种机器人拖链线缆,其特征在于,所述伸缩机构(6)包括限位块(601),所述限位块(601)设置在限位环(301)的内部,所述限位块(601)的内部左右端均开设有空腔(602),所述空腔(602)的内部滑动连接有延伸块(604),所述限位块(601)与延伸块(604)的相邻一侧固定连接有多个弹簧(603),所述延伸块(604)固定连接在限位环(301)的一端。
4.根据权利要求2所述的一种机器人拖链线缆,其特征在于,上端所述限位环(301)的内部螺纹连接有螺栓(8),所述螺栓(8)的一端固定连接有转盘(7),所述螺栓(8)的另一端转动连接有夹环(9),一端所述夹环(9)的内部开设有空槽(10)。
5.根据权利要求3所述的一种机器人拖链线缆,其特征在于,所述伸缩机构(6)还包括卡槽(605),所述卡槽(605)开设在延伸块(604)的外壁上下端,所述卡槽(605)的内部滑动连接有卡块(606),所述卡块(606)固定连接在空腔(602)的内壁一端。
6.一种机器人拖链线缆的强度综合测试装置,包括测试台(1),其特征在于,所述测试台(1)的顶壁左右侧均设置有夹持机构(2),所述夹持机构(2)用于对拖链线缆完成夹持。
7.根据权利要求6所述的一种机器人拖链线缆的强度综合测试装置,其特征在于,所述夹持机构(2)包括移动框(204),所述移动框(204)固定连接在测试台(1)的顶壁左端,所述移动框(204)的顶壁固定连接有第二伺服电机(205),所述第二伺服电机(205)的输出端贯穿移动框(204)并固定连接有第二螺纹杆(208),所述第二螺纹杆(208)的外壁螺纹连接有延伸板(207),所述延伸板(207)的一端固定连接有固定架(210),所述固定架(210)的内壁前后侧均转动连接有电磁柱(209),所述电磁柱(209)的外壁固定连接有齿轮(211),所述齿轮(211)的外壁固定连接有夹爪(212),所述移动框(204)为对称设置。
8.根据权利要求6所述的一种机器人拖链线缆的强度综合测试装置,其特征在于,所述夹持机构(2)还包括滑槽(201),所述滑槽(201)开设在测试台(1)的顶壁中部,所述测试台(1)的外壁右侧固定连接有第一伺服电机(203),所述第一伺服电机(203)的输出端贯穿测试台(1)并固定连接有第一螺纹杆(202),所述第一螺纹杆(202)的外壁螺纹连接有滑块(206),右端所述移动框(204)固定连接在滑块(206)的顶端。
9.根据权利要求7所述的一种机器人拖链线缆的强度综合测试装置,其特征在于,两个所述齿轮(211)之间啮合连接。
10.根据权利要求6所述的一种机器人拖链线缆的强度综合测试装置,其特征在于,所述测试台(1)的顶壁固定连接有开关(4),所述开关(4)分别与第一伺服电机(203)、第二伺服电机(205)和电磁柱(209)电性连接。
技术总结
本申请涉及人工智能领域,提供了一种机器人拖链线缆及其强度综合测试装置,包括线缆机构,所述线缆机构用于保护机器人外部导线,所述线缆机构的上下端均固定连接有三维转动机构,所述三维转动机构用于加大拖链线缆的三维运动空间,所述线缆机构的内部设置有伸缩机构,所述伸缩机构增大了线缆机构可保护导线空间的容积。优选的,所述线缆机构包括限位环,所述三维转动机构包括伸缩杆,所述伸缩杆的一端分别固定连接在限位环的外壁上下端,通过三维转动机构内部结构的共同作用,同时给予限位环前后左右四个水平方向的运动空间,可保证内部线缆的实时跟随,提高了机器人可做运动的空间,同时扩大了所适配机器人的使用范围。
技术研发人员:张成功
受保护的技术使用者:江西民赞电线电缆有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!