无刷电机与电磁阀双驱系统的制作方法
本发明涉及汽车控制管理,具体涉及无刷电机与电磁阀双驱系统。
背景技术:
1、目前在汽车领域中,随着控制系统的更新迭代加快,为了满足热管理系统对泵与电磁阀在功能丰富和高性能方面的要求,需要设计一种能够同时驱动无刷电机与电磁阀的控制器,而市场上基本上只能驱动无刷电机或电磁阀其中的一种,而无刷电机与电磁阀双驱系统国内是一片空白,若是想要通过使用现成的无刷电机控制器和电磁阀控制器进行组合的方式来实现无刷电机与电磁阀的双驱动,存在不同控制器的通讯和兼容性不稳定,以及难以实现体积小、高性能要求的应用场景。
2、例如,申请号为cn201710416903.1公开了一种蒸柜的双控制系统中,包括主系统和备用系统,又包括电源电路、单片机端口控制电路、电磁阀驱动电路、比例阀驱动电路、点火驱动电路、dc直流无刷电机驱动电路、蒸汽泵驱动电路、温度/档位/门控检测电路、火焰检测电路、水位检测电路、蒸汽泵驱动电路以及模式选择驱动电路,当主系统遇到故障时,可以启动备用系统,用于提升蒸箱可靠使用的安全系数,但是存在不能同时对主系统和备用系统进行调控,且备用系统的功能不全,以及适应场景不适应于汽车领域的缺陷。
3、现有技术存在以下不足:无刷电机与电磁阀双驱系统在控制两路无刷电机与电磁阀时,传统控制器难以自适应驱动无刷电机与电磁阀,且在复杂驱动中遇到驱动异常情况,难以实现实时监控电机位置和转速,以及电压和电流信号,不能满足和实现无刷电机与电磁阀双驱的需求。
4、在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的是提供无刷电机与电磁阀双驱系统,本发明通过对主控制器中设置两组计数器、dir、emios和lcu分别通过三相全桥驱动器,采用六步换相逻辑算法控制两路无刷电机和电磁阀,以解决上述背景技术中的问题。
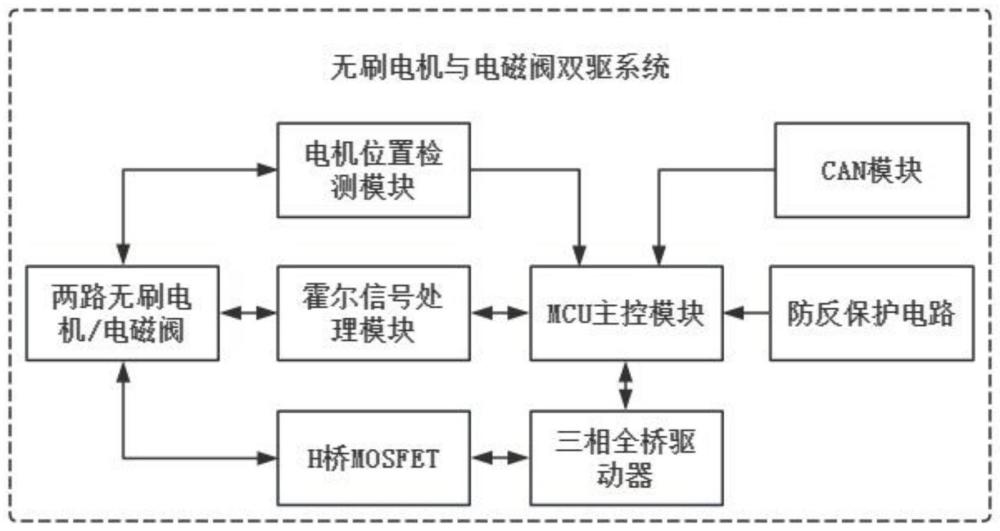
2、为了实现上述目的,本发明提供如下技术方案:无刷电机与电磁阀双驱系统,包括两路无刷电机/电磁阀,分别驱动汽车热管理系统中的泵和电磁阀,用于控制液体/气体的流动;
3、can模块,连接mcu主控模块,与汽车的总线系统进行通信,以实现双驱系统中各个模块之间的数据传输和通信;
4、电机位置检测模块,采用霍尔传感器/编码器检测并测量电机转子位置,提供实时的电机位置反馈信号,传输至霍尔信号处理模块进行模数转换处理,并传输至mcu主控模块中进一步计算控制电机的转动;
5、霍尔信号处理模块,连接两路无刷电机/电磁阀并接收来自内部的霍尔传感器的检测信号进行处理,再输出给mcu主控模块;
6、h桥mosfet,是驱动控制无刷电机/电磁阀电机相线的开关器件,直接连接两路无刷电机/电磁阀并实现无刷电机正反转/电磁阀开关动作,以及调节无刷电机/电磁阀的占空比,用于控制电机相线的导通和截断;
7、三相全桥驱动器,连接mcu主控模块,能够根据输入的控制信号切换不同的无刷电机/电磁阀相线的导通状态,用于驱动电机相位线圈而同时控制两路无刷电机/电磁阀;
8、mcu主控模块,实时采集、接收、处理和发送双驱系统中各模块的各种信号,包括外围输入数字信号、模拟信号和can数据,根据输入信号,做六步换相逻辑算法输出,控制和调节双驱系统的运行状态;
9、防反保护电路,布设于双驱系统内,防止在供电电源误接反情况下,驱动器、控制器所连接的电路中出现电流倒灌,保护双驱系统中电子元件免受反向电流的破坏。
10、优选地,霍尔传感器/编码器都是检测电机转子位置的传感器;在无刷电机和电磁阀双驱系统的控制中,采用三个霍尔传感器均匀安装在电机转子周围,彼此之间为120°的位置,当转子通过其中一个霍尔传感器时,传感器会输出一个高电平信号指示这个转子的位置,通过检测这三个传感器输出信号的组合,以确定转子的当前位置,从而进行控制算法的计算,即采用空间向量的计算步骤如下:
11、采集三个霍尔传感器的输出信号ha、hb、hc,并设定输出信号的高电平为h,低电平为l;
12、将电机转子的位置转化为空间向量
13、式中,i=1、2、3、4、5、6,分别表示电机转子在不同的位置状态下的三相电压向量,则v1=[h,l,l,]、v2=[h,h,l,]、v3=[l,h,h,]、v4=[l,h,l,]、v5=[l,l,h,]、v6=[h,l,h,];
14、根据电机转速确定电机运行的周期t,且周期计算公式为式中,n表示为电机每分钟的转速,p表示无刷电机的极数;
15、根据电机转子的位置信息,结合空间向量的形式计算出各个向量的幅值和相位角。
16、优选地,霍尔信号处理模块是将接收到的霍尔信号经过放大器生成模拟信号,再经过adc模数转换器转换成数字信号,再次经过数字信号处理算法对转换的数字信号进行滤波、校正、噪声消除处理。
17、优选地,所述mcu主控模块包括主控制器1,主控制器1又包括两个emios2、两个dir3、两个lcu4和两个计数器5;
18、emios2是产生pwm信号的定时器,emios2能够根据计数器获取的转子位置信息,通过逻辑计算和控制信号的处理,生成合适的电机驱动信号,用于实现主控制器对无刷电机的速度和位置控制,与电磁阀的开关控制;
19、dir3是根据主控制器下发的指令,向三相全桥驱动器提供切换电机转向的正转和反转的控制信号;
20、lcu4是主控制器内的逻辑控制单元,通过接收来自计数器5、emios2、dir3的输入信号和算法计算结果,对控制信号进行逻辑判断和处理,产生最终有效的驱动信号,用于控制三相全桥驱动器并驱动两路无刷电机/电磁阀;
21、计数器5是对编码器反馈线上的信号进行计数,实时准确地跟踪电机的转子位置,并提供转子位置信息给emios2和lcu4使用。
22、优选地,所述主控制器1上分别连接两个三相全桥驱动器6,则每个三相全桥驱动器6均通过u、v和w的三相位线圈8分别连接有电磁阀9和无刷电机10,且三相全桥驱动器6的交叉点与u、v和w的三相位线圈8的u、v、w线逐一相连成闭合的回路,u、v和w的三相位线圈8串联连接有电阻11,电阻11的另一端接地12,电磁阀9和无刷电机10与主控制器1之间均连接有编码器反馈线7,形成两路无刷电机/电磁阀的闭环驱动电路。
23、优选地,所述dir3信号控制无刷电机10的转向,当dir3信号为高电平时,无刷电机10正转;当dir3信号为低电平时,无刷电机10反转。
24、优选地,三相全桥驱动器6的控制信号包括uh、ul、vh、vl、wh和wl信号,使得主控制器1中的lcu4采用六步换相逻辑算法,通过控制三相全桥驱动器6中的各个开关状态,分别控制无刷电机10和电磁阀9的u、v和w的三相位线圈8的电压和电流。
25、优选地,六步换相逻辑算法是确定无刷电机10每一时刻的通断,通过调节u、v和w线相位实现无刷电机10的顺时针或逆时针旋转,在无刷电机和电磁阀的双驱系统中,六步换相逻辑算法步骤如下:
26、获取反馈信号并确定无刷电机位置:通过编码器反馈线7采集并采用计数器5记录无刷电机10的旋转位置反馈信号,根据解码反馈信号,确定无刷电机10当前的角度位置;
27、计算无刷电机10转动位置:根据设定的无刷电机10旋转角度θ1,结合测量到的当前无刷电机10位置信息θ2,计算无刷电机10需要转动的相对角度δθ=|θ1-θ2|;
28、计算无刷电机10旋转速度:通过检测无刷电机10旋转角度的反馈信号的变化速率和t,式中表示无刷电机10旋转角度的增量,t表示无刷电机10旋转角度的时间间隔,计算无刷电机10旋转的实时速度且无刷电机10旋转角度与速度之间的关系式为δθ=360°×δv×δt/n极对数,式中,δθ为无刷电机10的旋转角度,δv为无刷电机10的旋转速度,δt为无刷电机10发生周期性一次六步换相操作的时间间隔,n极对数为无刷电机10为每圈旋转角度所对应的磁极数;
29、确定无刷电机10的控制信号:根据无刷电机10转动方向和旋转速度,结合双驱系统中的控制无刷电机10转向的dir信号,利用电机旋转速度和控制算法,计算出六步换相的uh、ul、vh、vl、wh和wl控制信号,其中,u、v、w是无刷电机10三相的通断信号,h和l分别表示高电平和低电平;
30、主控制器1输出控制信号:将六步换相逻辑算法计算出的控制信号输出到三相全桥驱动器6,控制无刷电机10相位的通断状态,以实现无刷电机10的顺时针或逆时针旋转。
31、优选地,所述防反保护电路包括电池bat、电池电路电源bat pwr、电机驱动器m1、电机e1、系统电源控制引脚vcr、变压器tv1、5个电容c元件,包括c1、c2、c3、c4和c5、电感元件l1、编程电压vpp、二极管d1、晶体管元件q1、2个电阻r元件,包括r1和r2,以及两个地线结构。
32、优选地,所述变压器tv1是过压保护的tvs二极管模块,且tvs二极管模块的型号tpsmb30cavr;
33、晶体管元件q1是双npn高频晶体管,采用的型号为qbc846b;
34、电机驱动器m1采用的型号为jmsh0406agq-13;
35、电感元件l1是车规功率电感产品,且车规功率电感的制造商编号为tmpv1265spv-5r6mn-d-hd;
36、二极管d1是一种快恢复二极管,二极管d1型号bas516,应用在双驱系统中的高频开关电源、逆变器、电动机驱动器的电路中进行整流和保护。
37、在上述技术方案中,本发明提供的技术效果和优点:
38、本发明通过对在双驱系统中设置了can模块,增加了信号输入输出的便利性,通过采用电机位置检测模块和霍尔信号处理模块,增加了无刷电机的信号采集的实时性和精确性,并通过mcu主控模块中的控制器,采用六步换相方法控制三相全桥驱动器,进一步驱动两路无刷电机/电磁阀,实现了兼容驱动控制无刷电机/电磁阀的需求,且达到了在线、离线检测的功能,以及在双驱系统中采用的防反保护电路进一步保护了主控制器、驱动器的装置,提高了双驱系统运行的稳定性,满足用户和市场的需求,促进汽车领域的发展。
- 还没有人留言评论。精彩留言会获得点赞!