水平方向全拉簧负刚度恒值准零刚度隔振结构及调试方法
本发明涉及准零刚度隔振器的,尤其涉及一种水平方向全拉簧负刚度恒值准零刚度隔振结构及调试方法。
背景技术:
1、准零刚度隔振器通常由在平衡位置正刚度结构与负刚度机构进行并联来实现,所以当准零刚度隔振器在处于平衡位置时其动态刚度接近于零,从而可以实现低频、超低频隔振。因重力原因,现存的准零刚度隔振器大多为竖直方向的准零刚度隔振器,对于水平方向的振动隔离研究很少。传统的隔振技术无法满足高精度设备对于水平方向隔振的要求,所以有必要开展水平方向上准零刚度隔振器的创新设计。
技术实现思路
1、针对现有的准零刚度隔振器难以实现水平方向低频、超低频隔振的技术问题,本发明提出一种水平方向全拉簧负刚度恒值准零刚度隔振结构及调试方法,可以实现对水平方向上的低频、超低频振动隔离。
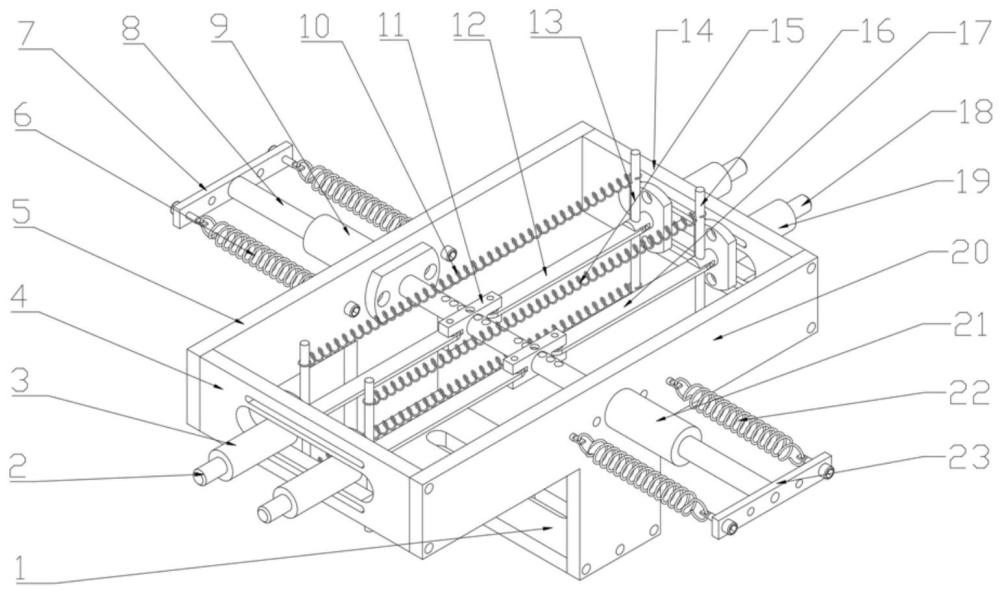
2、为了达到上述目的,本发明的技术方案是这样实现的:一种水平方向全拉簧负刚度恒值准零刚度隔振结构,包括主体部分和辅助机构;所述主体部分和辅助机构均包括正刚度机构和负刚度机构,正刚度机构和负刚度机构并联连接,负刚度机构关于纵向对称,负刚度机构包括斜杆和负刚度拉簧,斜杆交叉配置,相交斜杆的两端通过负刚度拉簧相连接;所述主体部分和辅助机构的正刚度机构均设置在水平线;所述正刚度机构包括主拉簧,主拉簧与水平线平行,正刚度机构和负刚度机构均安装在固定结构上。
3、优选地,所述水平线上设有连接杆,连接杆的两端分别在直线轴承ii、直线轴承iii的内径中滑动;直线轴承ii、直线轴承iii均与固定结构固定连接;所述连接杆的两端分别与主体部分的弹簧挂板i、辅助机构的弹簧挂板ii固定连接,主拉簧包括主体部分的主拉簧i和辅助机构的主拉簧ii,主拉簧i的一端固定在弹簧挂板i上,主拉簧i的另一端与固定结构固定连接;所述主拉簧ii的一端固定在弹簧挂板ii上,主拉簧ii的另一端与固定结构固定连接;所述斜杆与连接杆相铰接。
4、优选地,所述主拉簧i和主拉簧ii的数量均设有2个,2个主拉簧i对称设置在连接杆一端的两侧,2个主拉簧ii对称设置在连接杆另一端的两侧;所述主拉簧i的另一端均固定在固定结构上,主拉簧i的一端分别通过挂钩挂在在弹簧挂板i的两侧;所述主拉簧ii的另一端均固定在固定结构上,主拉簧ii的一端分别通过挂钩挂在弹簧挂板ii的两侧;所述弹簧挂板i和弹簧挂板ii的中心分别与连接杆的端部固定连接。
5、优选地,所述负刚度机构包括两个斜杆i和两个横向导杆i,两个斜杆i的一端均与h型连接块i相铰接,h型连接块i固定在连接杆上;所述斜杆i的另一端分别与不同横向导杆i相铰接,斜杆i和横向导杆i的铰接处均设有拉簧挂杆i,两个拉簧挂杆i之间安装有负刚度拉簧i,横向导杆i沿直线轴承i的内径滑动,直线轴承i固定在固定结构。
6、优选地,所述两个斜杆i的一端分别设置在h型连接块i的两端,且斜杆i与h型连接块i的端部相铰接;所述h型连接块i套在连接杆上且h型连接块i通过螺栓与连接杆相连接。
7、优选地,所述h型连接块i的中部设有通孔i,h型连接块i通过通孔i套在连接杆上并通过螺栓固定连接。
8、优选地,所述连接杆上设有多个定位孔i,h型连接块i中部设有定位孔ii,定位孔i与定位孔ii通过螺栓固定。
9、优选地,所述固定结构包括两个t型板,两个t型板两侧分别与两个侧板通过螺栓固定连接;所述连接杆在直线轴承ii、直线轴承iii内径中滑动,直线轴承ii、直线轴承iii均与t型板通过螺栓固定连接,负刚度机构的横向导杆i沿直线轴承i、直线轴承ii的轴向滑动,直线轴承i、直线轴承ii均与侧板通过螺栓固定连接;所述两个t型板与固定板通过螺栓固定连接;
10、所述主拉簧i的另一端通过挂钩固定在t型板上。
11、一种水平方向全拉簧负刚度恒值准零刚度隔振结构的调试方法,其步骤如下:
12、步骤一、对隔振结构提供水平方向的准零刚度的主体部分和提供水平方向的恒力的辅助机构进行力学分析,分别获得主体部分和辅助机构的水平方向即连接杆的轴向的力表达式;
13、步骤二、对力表达式除以初始状态下的斜杆长度与主拉簧刚度的乘积进行无量纲化处理得到无量纲力;
14、步骤三、求无量纲力对无量纲位移的一阶导数得到无量纲刚度;
15、步骤四、在静平衡位置,对无量纲刚度分别求一阶导数和二阶导数,获得准零刚度特性的参数条件;
16、步骤五、根据主体部分和辅助机构的准零刚度特性的参数条件分别调整主体部分和辅助机构的负刚度弹簧刚度与主拉簧刚度的比值和负刚度弹簧的预拉伸长度,获得水平方向上的准零刚度隔振效果。
17、使主体部分的负刚度弹簧刚度与主拉簧刚度的比值α1小于且接近于0.25,并且负刚度弹簧的预拉伸长度δ1等于斜杆在初始状态下的两铰接点之间的水平长度α1,获得主体部分的恒值准零刚度特性;使辅助机构的负刚度弹簧刚度与主拉簧刚度的比值α=0.5,并且负刚度弹簧的预拉伸长度δ等于斜杆在初始状态下的两铰接点之间的水平长度a相等,获得辅助机构的零刚度恒力特性,为主体部分提供恒力,模拟水平方向的恒力场景特性;
18、所述主体部分的无量纲力
19、所述主体部分的无量纲刚度
20、且
21、所述在静平衡位置,对无量纲刚度分别求一阶导数和二阶导数,获得零刚度特性的参数条件:
22、其中,k4是主体部分的主拉簧的刚度,k3是主体部分的负刚度机构中的负刚度拉簧的刚度,δ1指主体部分的负刚度机构的负刚度拉簧在初始状态下的预拉伸长度,h1是初始状态下位置到静平衡位置的水平距离,x1是从初始位置开始的位移,y1是从静平衡位置开始的位移且x1=y1+h1;a1是初始状态下斜杆两端铰接点之间的水平长度;为位移x1的无量纲位移,为位移y1的无量纲位移,为水平长度a1的无量纲长度,为预拉伸长度的无量纲长度,α1为负刚度弹簧刚度与主拉簧刚度的比值;p和q是中间参数变量;
23、辅助机构的作用是为主体部分提供一个水平向左的恒力,首先获得f的表达式,为了分析更广泛的结构参数特征,对应用力f及其表达式进行无量刚化,可得无量纲化应用力表达式,求表达式对的一阶导数,可得无量纲刚度在静平衡位置,对无量纲刚度分别求一阶导数和二阶导数,可获得零刚度特性的参数条件;
24、辅助机构的无量纲力:
25、辅助机构的无量纲刚度:
26、辅助机构的零刚度参数条件
27、参数表达式为
28、其中,k2是辅助机构的主拉簧的刚度,k1是辅助机构的负刚度机构中的负刚度拉簧的刚度,h是初始状态到静平衡位置的水平距离,x是从初始位置开始的位移;a是辅助机构的初始状态下斜杆两端铰接点之间的水平长度;δ是辅助机构的负刚度机构的负刚度拉簧在初始状态下的预拉伸长度;α是辅助机构的负刚度弹簧刚度与主拉簧刚度的比值;p1、p2和p3是中间参数变量。
29、与现有技术相比,本发明的技术方案所带来的有益效果是:
30、1.在有关单对斜杆准零刚度研究中,本发明的单对斜杆的负刚度机构构成零刚度隔振结构,结构简单、易于加工和装配。
31、2.本发明提出了新的参数假设,获得了力、刚度表达式;在静平衡点位移,令刚度等于零和刚度二阶导数等于零,此两个零刚度参数条件的应用,提出零刚度调试方法;调试方法简单、直观、易于实现,方便结构设计。
32、3.通过本发明的零刚度调试方法,可获得静平衡点附近是直线的零刚度特性,可以降低振子的共振频率,可实现低频、超低频隔振。
- 还没有人留言评论。精彩留言会获得点赞!