一种平衡缸及机器人的制作方法
本技术涉及智能机器,尤其涉及一种平衡缸及机器人。
背景技术:
1、平衡缸是一种设置在机器人的基座和轴杆之间的平衡结构,其内部一般设置弹性结构比如弹簧等,在轴杆动作时,弹性件产生形变以抵消由于重力作用产生的对轴杆的额外作用力。
2、现有技术中,平衡缸包括缸体、缸轴、挡板以及弹簧。缸体的一端与基座固定,缸轴与缸体滑动连接,且缸轴的一端伸出缸体并与轴杆相连接。弹簧的一端与挡板固定,另一端与缸体固定。当轴杆相对于基座发生移动时,缸轴就会相对于缸体滑动,缸轴带动挡板移动,进而压缩弹簧产生弹性形变,以实现对两根轴之间作用力的抵消。
3、但是,上述弹性形变所产生的反作用力主要取决于该弹簧的刚度系数和弹簧的形变幅度,而弹簧的刚度系数不能调整,也就是说平衡缸提供的反作用力与缸轴的活动距离是线性关系,使得平衡缸的刚度恒定不可调节,导致其适用范围有限。
技术实现思路
1、本实用新型的目的在于提供一种平衡缸及机器人,解决了现有技术中平衡缸的刚度系数不变而弹性件的形变幅度有限,导致其能够抵消的作用力的范围较小,致使其适用范围有限的问题。
2、为达此目的,本实用新型采用以下技术方案:
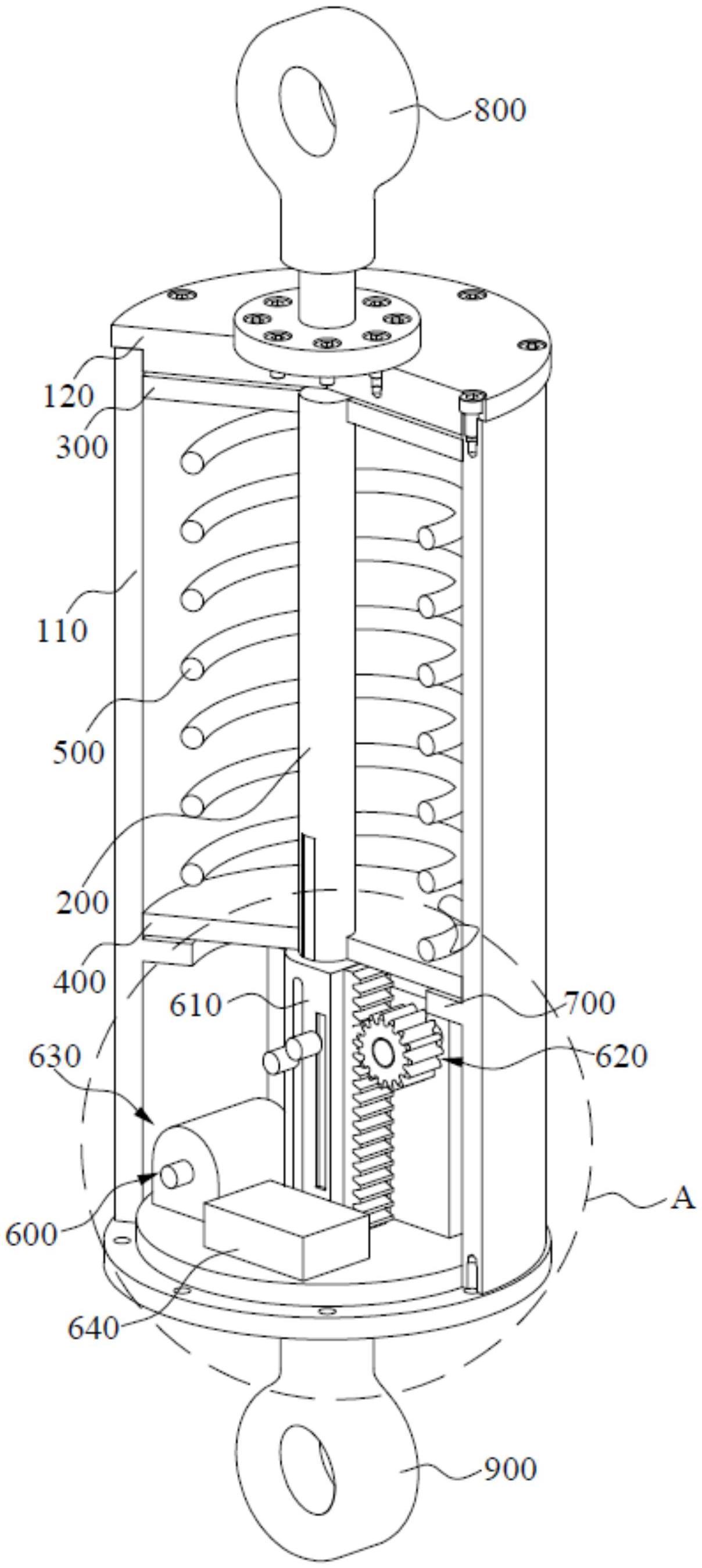
3、第一方面,本实用新型提供一种平衡缸,其包括:缸体、缸轴、挡板、活塞、弹性件以及调节组件。缸体一端用于与基座固定连接;缸轴活动连接于所述缸体内且一端伸出所述缸体的另一端并与轴杆连接;挡板固定于所述缸轴的另一端;活塞设置于所述缸体内并与所述挡板相对设置,弹性件一端与所述挡板连接,另一端与所述活塞连接;调节组件设置于所述缸体内并与所述活塞相连接,所述调节组件用于根据所述缸轴的移动距离驱动所述活塞移动,以改变所述弹性件的有效压缩量。
4、可选地,所述调节组件包括:调节柱,滑动连接于所述缸体内并与所述活塞相连接;传动件,与所述调节柱相连接;以及驱动件,与所述传动件相连接并根据所述缸轴的移动距离选择性地启动或停止以通过所述传动件驱动所述调节柱移动。
5、可选地,所述调节柱套设于所述缸轴并与所述缸轴滑动连接。
6、可选地,所述调节柱上开设有与所述缸轴连通并沿所述缸轴滑动方向延伸的检测缺口,所述调节组件还包括:第一检测件,与所述检测缺口内的所述缸轴相对应以检测所述缸轴的移动距离并与所述驱动件通讯连接。
7、可选地,所述调节组件还包括:第二检测件,与所述调节柱相对应以检测所述调节柱的移动距离。
8、可选地,所述传动件包括:齿条,固定于所述调节柱并沿所述缸轴的轴线方向延伸;以及齿轮,与所述驱动件相连接并与所述齿条相啮合。
9、可选地,所述驱动件包括:电机;以及减速机,与所述电机及所述传动件分别连接。
10、可选地,所述平衡缸还包括:限位条,设置于所述缸体内并与所述活塞远离所述弹性件的一侧选择性地抵接。
11、可选地,所述缸体的端壁设有用于与基座固定连接的第一连接头,所述缸轴伸出所述缸体的一端设有与轴杆固定连接的第二连接头。
12、第二方面,本实用新型提供一种机器人,其包括:基座;轴杆;以及如上述第一方面中任一项所述的平衡缸,分别与所述基座及所述轴杆连接。
13、本实用新型的有益效果:
14、第一方面,通过调节组件的设置,在机器人的基座与基座相对运动时,调节组件能够驱动活塞以使得活塞根据缸轴的移动而发生移动。而缸轴与挡板固定连接,挡板随着缸轴移动时会压缩弹性件,而活塞也能够同步对弹性件进行压缩,使得弹性件的有效压缩量发生改变,则弹性件的刚度也就对应发生改变,进而平衡缸整体产生的作用力对应发生变化,使得该平衡缸能够抵消更大范围内的作用力,从而其能够应用于不同型号的机器人上,有效提高了该平衡缸的应用范围。
15、第二方面,应用该平衡缸的机器人,能够根据机器人的应用场景,更加灵活地对平衡缸刚度进行调整,以快速产生能够有效抵消负载的作用力,有利于提高该机器人的应用范围以满足相应的应用条件。。
技术特征:
1.一种平衡缸,其特征在于,包括:
2.根据权利要求1所述的平衡缸,其特征在于,所述调节组件(600)包括:
3.根据权利要求2所述的平衡缸,其特征在于,所述调节柱(610)套设于所述缸轴(200)并与所述缸轴(200)滑动连接。
4.根据权利要求3所述的平衡缸,其特征在于,所述调节柱(610)上开设有与所述缸轴(200)连通并沿所述缸轴(200)滑动方向延伸的检测缺口(611),所述调节组件(600)还包括:
5.根据权利要求2所述的平衡缸,其特征在于,所述调节组件(600)还包括:
6.根据权利要求2所述的平衡缸,其特征在于,所述传动件(620)包括:
7.根据权利要求2所述的平衡缸,其特征在于,所述驱动件(630)包括:
8.根据权利要求1至7中任一项所述的平衡缸,其特征在于,所述平衡缸还包括:
9.根据权利要求1至7中任一项所述的平衡缸,其特征在于,所述缸体(100)的端壁设有用于与基座固定连接的第一连接头(800),所述缸轴(200)伸出所述缸体(100)的一端设有与轴杆固定连接的第二连接头(900)。
10.一种机器人,其特征在于,所述机器人包括:
技术总结
本技术属于智能机器技术领域,公开了一种平衡缸及机器人。该平衡缸包括:缸体、缸轴、挡板、活塞、弹性件以及调节组件。缸体一端用于与基座固定连接。缸轴活动连接于缸体内并用于与轴杆连接;挡板固定于缸轴的另一端;活塞设置于缸体内并与挡板相对设置,弹性件一端与挡板连接,另一端与活塞连接;调节组件设置于缸体内并与活塞相连接;调节组件可根据预设的程序实时控制活塞在缸体内活动,影响弹性件的压缩量。以此该平衡缸通过利用弹性件的有效压缩量与缸轴拉伸量的不同而改变平衡缸的刚度,使得该平衡缸在使用时能够快速实时调节平衡缸的刚度和提供的作用力,从而其能够满足不同型号的机器人的不同需求,有效提高了该平衡缸的应用范围。
技术研发人员:李法设,周福兴,陈宏伟,顾泽民
受保护的技术使用者:中科新松有限公司
技术研发日:20230203
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!