一种管道检测机器人防倾覆装置的制作方法
本技术涉及管道检测(如电视检测、潜望镜检测等)车型机器人,尤其是指一种管道检测机器人防倾覆装置。
背景技术:
1、管道检测机器人可通过安装在机体本身的摄像头来获取视频图像信息并对其进行放大处理后显示在屏幕上,再由操作人员使用专用的分析软件进行查看、修改和分析处理。可用于各种口径、长距离等不方便人为操作的场景。然而实际使用中会因为管道坡度的改变、管内沉积物增加等因素导致管道检测机器人在前行过程中不沿管底行走,误差累积到一定程度时会造成管道检测机器人倾覆,无法继续前进。此时需要操作人员将管道检测机器人从倾覆点拖回,当距离长、管道检测机器人本身机体较重时,会带来极大的不便。因此有必要提出一种防止倾覆的装置,使管道检测机器人无论在何种情况下都不会出现倾覆的情况,保证检测工作的顺利进行。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种管道检测机器人防倾覆装置,能够使管道检测机器人在适应各种坡度与管道内的障碍物,在何种情况下都不会出现倾覆的情况,保证检测工作的顺利进行。
2、为解决上述技术问题,本实用新型提供一种管道检测机器人防倾覆装置,包括:
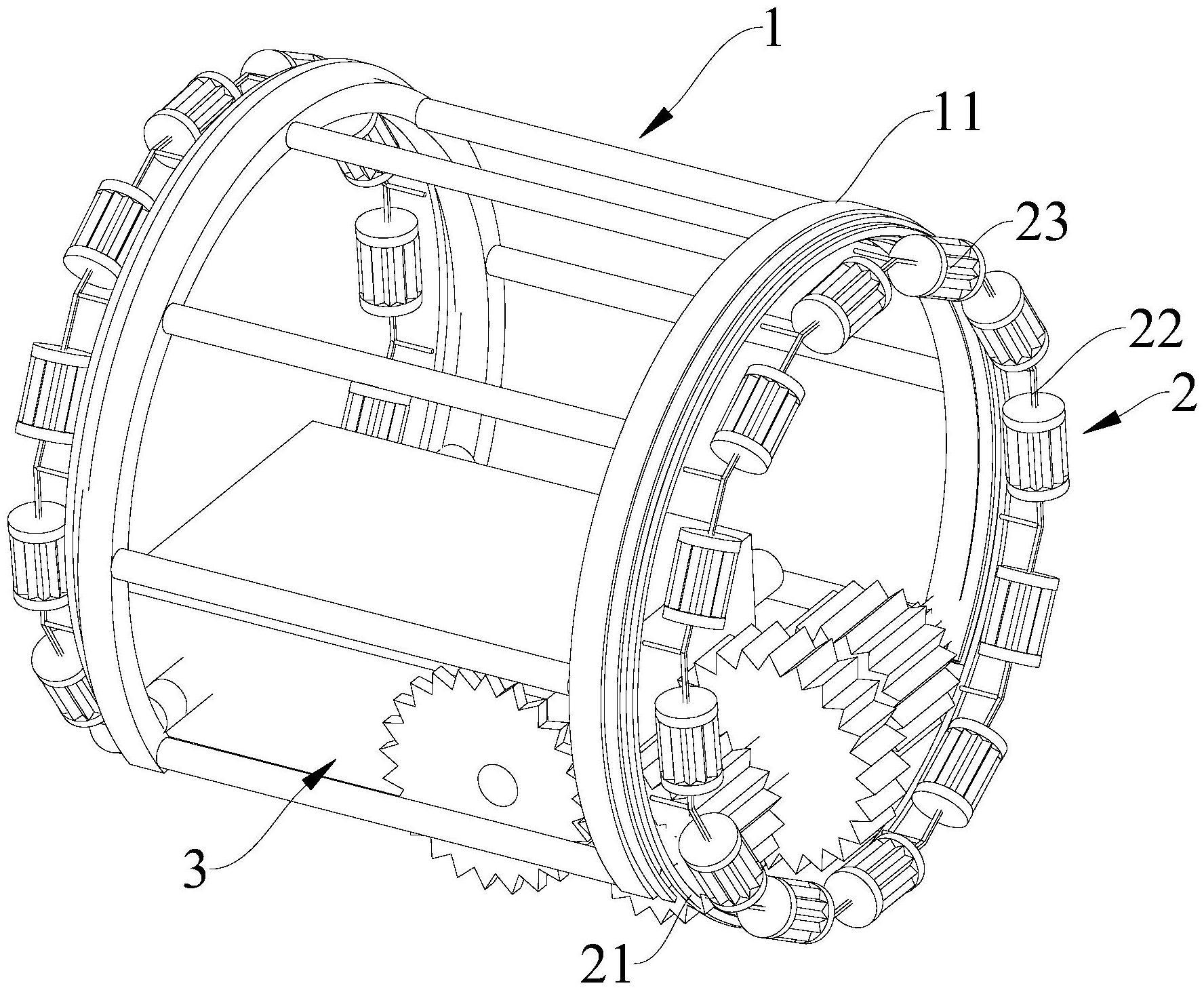
3、机架,所述机架包括轴向相对设置且相连的两个固定环;
4、滚动机构,所述滚动机构包括与每个所述固定环相连的滚动环、同心连接于所述滚动环轴向一侧的多边形架以及转动连接于所述多边形架的边的滚动轮;
5、设于所述机架的机器人本体,所述机器人本体连接有主动轴,所述主动轴连接于有主动齿轮,所述主动轴一侧设有从动轴,所述从动轴连接有至少一个从动齿轮,且至少一个从动齿轮与主动齿轮相啮合;
6、其中,所述滚动环与所述固定环同心转动相连并能够在重力作用下沿所述固定环周向自由滑动,且在重力作用下,所述从动齿轮能够带动位于所述多边形架中底部至少一条边上的滚动轮转动。
7、在本实用新型的一种实施方式中,所述机架还包括轴向设于两个固定环之间的连接柱。
8、在本实用新型的一种实施方式中,每个所述固定环的轴向一端设有凹圆槽,所述凹圆槽沿固定环周向设置,所述滚动环容置于所述凹圆槽内。
9、在本实用新型的一种实施方式中,所述滚动轮和所述驱动齿轮各自的中轴线与所述固定环的中轴线相垂直。
10、在本实用新型的一种实施方式中,所述机器人本体还设有支撑柱,所述从动轴转动连接于其中一个固定环的从动轴,所述支撑柱连接于另一个固定环。
11、在本实用新型的一种实施方式中,所述从动齿轮设置有三个,三个从动齿轮分别能够带动位于所述多边形架中底部的三条边上的滚动轮转动。
12、在本实用新型的一种实施方式中,所述滚动轮包括长齿轮以及与分别与长齿轮轴向两端相连的两个圆轮,所述圆轮的直径等于所述长齿轮的外接圆直径。
13、在本实用新型的一种实施方式中,所述多边形架为正多边形结构,所述滚动轮的数量与所述多边形架的边的数量相等。
14、在本实用新型的一种实施方式中,所述多边形架的边的数量至少为十二条。
15、在本实用新型的一种实施方式中,所述多边形架中相邻两条边的连接处沿所述多边形架轴向延伸有与滚动环相连的固定柱。
16、在本实用新型的一种实施方式中,所述固定环底部设有开口。
17、本实用新型的上述技术方案相比现有技术具有以下优点:
18、本实用新型所述的一种管道检测机器人防倾覆装置,能够使管道检测机器人在适应各种坡度与管道内的障碍物,在何种情况下都不会出现倾覆的情况,保证检测工作的顺利进行。
技术特征:
1.一种管道检测机器人防倾覆装置,其特征在于,包括:
2.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述机架(1)还包括轴向设于两个固定环(11)之间的连接柱(12)。
3.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,每个所述固定环(11)的轴向一端设有凹圆槽(111),所述凹圆槽(111)沿固定环(11)周向设置,所述滚动环(21)容置于所述凹圆槽(111)内。
4.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述机器人本体(3)还设有支撑柱(36),所述从动轴(34)转动连接于其中一个固定环(11)的从动轴(34),所述支撑柱连接于另一个固定环(11)。
5.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述从动齿轮(35)设置有三个,三个从动齿轮(35)分别能够带动位于所述多边形架(22)中底部的三条边上的滚动轮(23)转动。
6.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述滚动轮(23)包括长齿轮(231)以及与分别与长齿轮(231)轴向两端相连的两个圆轮(232),所述圆轮(232)的直径等于所述长齿轮(231)的外接圆直径。
7.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述多边形架(22)为正多边形结构,所述滚动轮(23)的数量与所述多边形架(22)的边的数量相等。
8.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述多边形架(22)的边的数量至少为十二条。
9.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述多边形架(22)中相邻两条边的连接处沿所述多边形架(22)轴向延伸有与滚动环(21)相连的固定柱(26)。
10.根据权利要求1所述的一种管道检测机器人防倾覆装置,其特征在于,所述固定环(11)底部设有开口(112)。
技术总结
本技术涉及一种管道检测机器人防倾覆装置。本技术包括机架,所述机架包括轴向相对设置且相连的两个固定环;滚动机构,所述滚动机构包括与每个所述固定环相连的滚动环、同心连接于所述滚动环轴向一侧的多边形架以及转动连接于所述多边形架的边的滚动轮;设于所述机架的机器人本体,所述机器人本体连接有主动轴,所述主动轴连接于有主动齿轮,所述主动轴一侧设有从动轴,所述从动轴连接有至少一个从动齿轮,且至少一个从动齿轮与主动齿轮相啮合。本技术能够使管道检测机器人在适应各种坡度与管道内的障碍物,在何种情况下都不会出现倾覆的情况,保证检测工作的顺利进行。
技术研发人员:吴晨悦,周溦,杨光,谭云鹏,陆逸波,温思浩,陆萌萌,王启予
受保护的技术使用者:华昕设计集团有限公司
技术研发日:20230217
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!