一种可稳定爬行的机器人的制作方法
本技术涉及机器人,具体为一种可稳定爬行的机器人。
背景技术:
1、地下管网是建于城市地下,并且用于铺设市政公用管线的市政公用设施。同时,地下管网在运行时一般可以采用监测机器人进行定期监测,地下管网监测的机器人一般配有先进的高清摄像头及强光照明组件,通过遥控设备控制其在管网内灵活爬行,使得机器人可以代替人工广泛的对各种隐蔽空间、窄小空间完成实时影像的监测。
2、根据专利号:201922227364.4一种用于城市地下管网的检测系统,通过摄像主体、数据传输线、调节车轮和控制箱,实现了满足不同直径的污水管检测,提高了调节车轮的通用性,降低了整体的制造成本和检测成本的目的;
3、这种现有技术方案在使用时,需要保证机器人的车轮行走在潮湿的地下管网中,但是在该技术方案内,通过对车轮进行减震性的优化,但是在机器人沿着管道爬行时,会存在机器人在弧形截面的管道内产生侧面倾斜的现象,当侧面倾斜角度过大时会造成机器人侧翻倾倒。
技术实现思路
1、本实用新型的目的在于提供一种可稳定爬行的机器人,以解决上述背景技术中提出的现有的机器人在地下管网内行驶时容易导致爬行不稳定的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种可稳定爬行的机器人,包括机器人车架、照明组件、高清摄像头、正反向马达和导向机构,
3、所述机器人车架的表面安装有照明组件,所述照明组件的表面连接有高清摄像头,所述机器人车架的两侧安装有行走轮;
4、所述机器人车架的内侧中部安装有双轴电机,所述机器人车架内部靠近双轴电机的两侧设置有导向机构,所述导向机构包括有丝杆、支杆、横梁和侧轮,所述双轴电机的两个输出端与丝杆相固定,且丝杆远离双轴电机的一端与机器人车架内壁的轴承座对接。
5、优选的,所述丝杆的下侧设置有支杆,所述丝杆与支杆均设置在机器人车架内部的预留槽内。
6、优选的,所述丝杆与横梁的一端为螺纹连接,所述支杆与横梁的一端为滑动连接,所述横梁贯穿伸出机器人车架的一侧连接有侧轮。
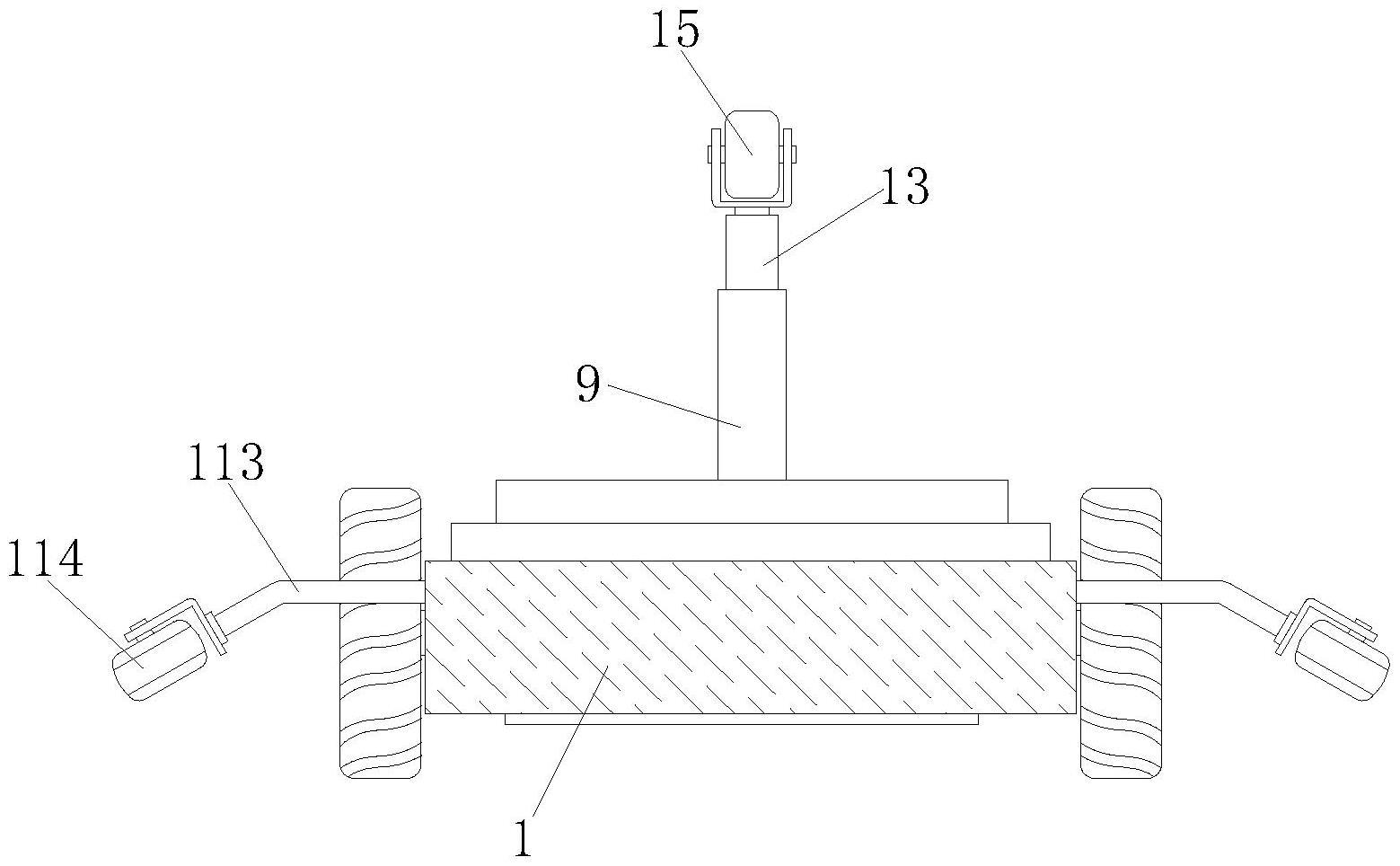
7、优选的,所述机器人车架的上侧包括有导向柱、支撑弹簧、滑杆、凸柱和辅助滚轮,且导向柱垂直连接在机器人车架的表面;
8、所述导向柱的内部设置有支撑弹簧,所述支撑弹簧的一端连接有滑杆,所述滑杆的内部连接有凸柱,所述凸柱的一端连接有辅助滚轮。
9、优选的,所述滑杆通过支撑弹簧与导向柱之间构成弹性伸缩结构,且辅助滚轮通过底部的凸柱与滑杆上端的预留槽进行转动连接。
10、优选的,所述正反向马达安装在高清摄像头的表面,所述正反向马达的输出端与螺纹杆为一体结构,所述高清摄像头的表面还连接有滑轨。
11、优选的,所述螺纹杆的外壁连接有移动座,所述移动座的一端连接有除垢刮条,且除垢刮条的上端与滑轨滑动对接。
12、优选的,所述移动座与除垢刮条之间为一体结构,且移动座与螺纹杆之间为螺纹连接,所述机器人车架的底部表面设置有用于检修维护的仓盖。
13、与现有技术相比,本实用新型的有益效果是:
14、1、该可稳定爬行的机器人在使用时,将该机器人设备放入地下管网的管道中时,根据管道内壁尺寸来控制双轴电机正反转,使得双轴电机带动丝杆与横梁的一端进行螺纹传动,从而横梁沿着光滑的支杆进行滑动,机器人车架在爬行过程中可以通过两侧的侧轮进行辅助支撑,可防止该机器人在管道内爬行时出现倾倒侧翻,通过滑杆与导向柱之间的弹性伸缩,使得辅助滚轮可自适应紧贴管道的内壁,通过机器人两侧呈对称的侧轮和顶部的辅助滚轮设置,可保证机器人在地下管网内具有稳定爬行的效果。
15、2、在使用该机器人对地下管网进行检测时,将该机器人车架摆放在指定管网内,通过遥控设备控制正反向马达的正向及反向转动,使正反向马达带动螺纹杆进行转动,从而使得对除垢刮条可沿高清摄像头的表面进行来回滑动,以便于对高清摄像头的表面进行清洁,保证机器人在地下管网运行监测时可以保证拍摄的影像具有清晰易观察的效果。
技术特征:
1.一种可稳定爬行的机器人,包括机器人车架(1)、照明组件(2)、高清摄像头(3)、正反向马达(4)和导向机构(11),其特征在于:
2.根据权利要求1所述的一种可稳定爬行的机器人,其特征在于:所述丝杆(111)的下侧设置有支杆(112),所述丝杆(111)与支杆(112)均设置在机器人车架(1)内部的预留槽内。
3.根据权利要求2所述的一种可稳定爬行的机器人,其特征在于,所述丝杆(111)与横梁(113)的一端为螺纹连接,所述支杆(112)与横梁(113)的一端为滑动连接,所述横梁(113)贯穿伸出机器人车架(1)的一侧连接有侧轮(114)。
4.根据权利要求1所述的一种可稳定爬行的机器人,其特征在于:所述机器人车架(1)的上侧包括有导向柱(9)、支撑弹簧(12)、滑杆(13)、凸柱(14)和辅助滚轮(15),且导向柱(9)垂直连接在机器人车架(1)的表面;
5.根据权利要求4所述的一种可稳定爬行的机器人,其特征在于:所述滑杆(13)通过支撑弹簧(12)与导向柱(9)之间构成弹性伸缩结构,且辅助滚轮(15)通过底部的凸柱(14)与滑杆(13)上端的预留槽进行转动连接。
6.根据权利要求1所述的一种可稳定爬行的机器人,其特征在于:所述正反向马达(4)安装在高清摄像头(3)的表面,所述正反向马达(4)的输出端与螺纹杆(5)为一体结构,所述高清摄像头(3)的表面还连接有滑轨(6)。
7.根据权利要求6所述的一种可稳定爬行的机器人,其特征在于:所述螺纹杆(5)的外壁连接有移动座(7),所述移动座(7)的一端连接有除垢刮条(8),且除垢刮条(8)的上端与滑轨(6)滑动对接。
8.根据权利要求7所述的一种可稳定爬行的机器人,其特征在于:所述移动座(7)与除垢刮条(8)之间为一体结构,且移动座(7)与螺纹杆(5)之间为螺纹连接,所述机器人车架(1)的底部表面设置有用于检修维护的仓盖。
技术总结
本技术公开了一种可稳定爬行的机器人,涉及机器人技术领域,包括机器人车架、照明组件、高清摄像头、正反向马达和导向机构,所述机器人车架的表面安装有照明组件。可稳定爬行的机器人在使用时,将该机器人设备放入地下管网的管道中时,根据管道内壁尺寸来控制双轴电机正反转,使得双轴电机带动丝杆与横梁的一端进行螺纹传动,从而横梁沿着光滑的支杆进行滑动,机器人车架在爬行过程中可以通过两侧的侧轮进行辅助支撑,可防止该机器人在管道内爬行时出现倾倒侧翻,通过滑杆与导向柱之间的弹性伸缩,使得辅助滚轮可自适应紧贴管道的内壁,通过机器人两侧呈对称的侧轮和顶部的辅助滚轮设置,可保证机器人在地下管网内具有稳定爬行的效果。
技术研发人员:宋文明,孟祥娟,田英欣,宋文菊,孟令海
受保护的技术使用者:山东同建工程勘测有限公司
技术研发日:20230223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!