一种机械臂末端的相机固定装置及充电机器人的制作方法
本技术涉及自动充电,尤其涉及一种机械臂末端的相机固定装置及充电机器人。
背景技术:
1、在机器视觉技术领域中,通常需要将机械臂与相机结合在一起而进行目标物体的识别和定位。现有技术中,一般是将相机直接固定安装在机械臂末端。由于大部分相机的视场角和工作距离比较局限,在需要对相机的视觉范围进行调节时只能通过机械臂的运动来实现,如此就要求有足够的空间便于机器臂运动,而在实际场景中机械臂的运动空间往往很有限。
技术实现思路
1、本实用新型的一个目的在于机械臂可以应用于无需移动机械臂就可以调节相机的视觉范围的场景中。
2、本实用新型的一个进一步的目的在于简化结构,降低成本。
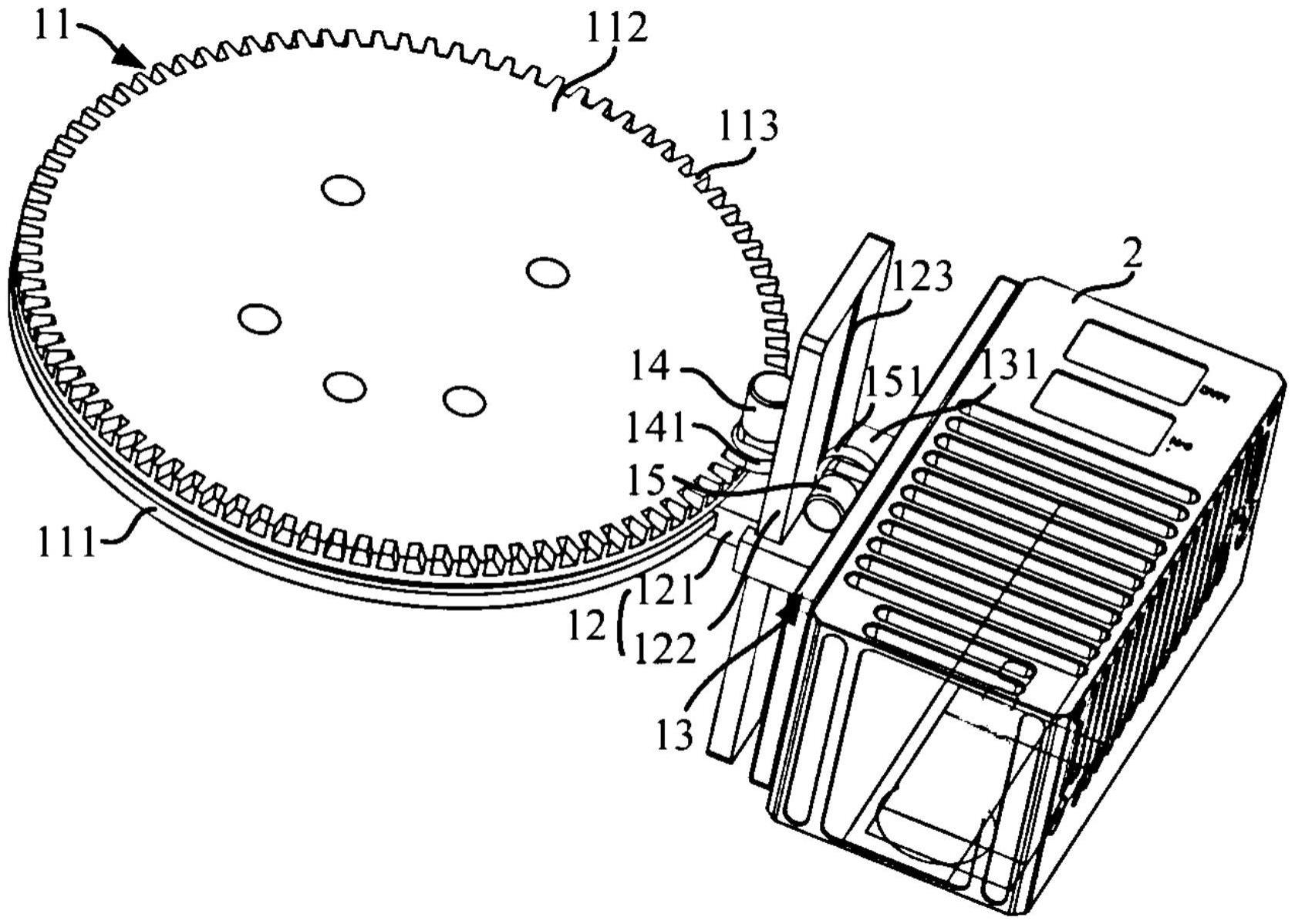
3、特别地,本实用新型提供了一种机械臂末端的相机固定装置,包括:
4、旋转固定件,设置在机械臂末端;
5、滑动组件,与所述旋转固定件连接,且能够相对所述旋转固定件转动;
6、相机固定架,用于固定相机,所述相机固定架与所述滑动组件连接,且能够相对所述滑动组件进行升降运动,且能够跟随所述滑动组件相对所述旋转固定件转动。
7、可选地,所述旋转固定件包括弧形导向部;
8、所述滑动组件包括第一滑动件,所述第一滑动件与所述弧形导向部配合,以受控地沿所述弧形导向部滑动,从而使得所述滑动组件相对所述旋转固定件转动。
9、可选地,所述旋转固定件还包括第一齿轮;
10、所述相机固定装置还包括设置在所述滑动组件上的第一驱动机构,所述第一驱动机构具有用于输出驱动力的第一驱动轴和与所述第一驱动轴连接的第二齿轮,所述第二齿轮与所述第一齿轮啮合,以受控地沿所述第一齿轮转动,从而使得所述第一滑动件沿所述弧形导向部滑动。
11、可选地,所述弧形导向部的外周缘为圆形。
12、可选地,所述第一齿轮和所述弧形导向部一体成型。
13、可选地,所述滑动组件还包括沿竖向延伸且与所述第一滑动件连接的竖向延伸件;
14、所述相机固定架包括第二滑动件,所述第二滑动件与所述竖向延伸件配合,以受控地沿所述竖向延伸件进行升降运动。
15、可选地,所述竖向延伸件具有竖向延伸部,所述第二滑动件与所述竖向延伸部滑动连接,以沿所述竖向延伸部进行升降运动。
16、可选地,所述竖向延伸部为所述第二滑动件的竖向边沿。
17、可选地,所述竖向延伸件具有沿竖向延伸的齿条部;
18、所述相机固定装置还包括设置在所述相机固定架上的第二驱动机构,所述第二驱动机构具有用于输出驱动力的第二驱动轴和与所述第二驱动轴连接的第三齿轮,所述第三齿轮与所述齿条部啮合,以受控地沿所述齿条部进行升降运动,从而带动所述相机固定架相对所述滑动组件进行升降运动。
19、特别地,本实用新型提供了一种充电机器人,包括机械臂和设置在机械臂末端的如前述的相机固定装置以及固定在所述相机固定装置上的相机。
20、根据本实用新型实施例的方案,通过设计旋转固定件、滑动组件和相机固定架,使得滑动组件能够相对旋转固定件转动,且使得相机固定架能够相对滑动组件进行升降运动,并能够跟随滑动组件相对旋转固定件转动,从而可以保证相机固定架带动相机一起进行转动和升降运动。由于相机可以相对机械臂进行转动和升降运动,因此,可以应用于空间受限的场景中,无需移动机械臂来调节相机的视觉范围,仅需相机相对机械臂运动即可实现调节相机的视觉范围的目的。
21、进一步地,旋转固定件、滑动组件和相机固定架的结构均较为简单,设计和加工非常便捷,且各个零部件均为成熟零部件,可靠性高且成本低,可以驱动相机进行旋转和纵向平移就可以解决不同位置的目标识别和定位。
22、根据下文结合附图对本实用新型具体实施例的详细描述,本领域技术人员将会更加明了本实用新型的上述以及其他目的、优点和特征。
技术特征:
1.一种机械臂末端的相机固定装置,其特征在于,包括:
2.根据权利要求1所述的相机固定装置,其特征在于,所述旋转固定件包括弧形导向部;
3.根据权利要求2所述的相机固定装置,其特征在于,所述旋转固定件还包括第一齿轮;
4.根据权利要求3所述的相机固定装置,其特征在于,所述弧形导向部的外周缘为圆形。
5.根据权利要求4所述的相机固定装置,其特征在于,所述第一齿轮和所述弧形导向部一体成型。
6.根据权利要求2-5中任一项所述的相机固定装置,其特征在于,所述滑动组件还包括沿竖向延伸且与所述第一滑动件连接的竖向延伸件;
7.根据权利要求6所述的相机固定装置,其特征在于,所述竖向延伸件具有竖向延伸部,所述第二滑动件与所述竖向延伸部滑动连接,以沿所述竖向延伸部进行升降运动。
8.根据权利要求7所述的相机固定装置,其特征在于,所述竖向延伸部为所述第二滑动件的竖向边沿。
9.根据权利要求7或8所述的相机固定装置,其特征在于,所述竖向延伸件具有沿竖向延伸的齿条部;
10.一种充电机器人,其特征在于,包括机械臂和设置在机械臂末端的如权利要求1-9中任一项所述的相机固定装置以及固定在所述相机固定装置上的相机。
技术总结
本技术提供了一种机械臂末端的相机固定装置及充电机器人。所述相机固定装置包括:旋转固定件,设置在机械臂末端;滑动组件,与所述旋转固定件连接,且能够相对所述旋转固定件转动;相机固定架,用于固定相机,所述相机固定架与所述滑动组件连接,且能够相对所述滑动组件进行升降运动,且能够跟随所述滑动组件相对所述旋转固定件转动。本技术的方案中,由于相机可以相对机械臂进行转动和升降运动,因此,可以应用于空间受限的场景中,无需移动机械臂来调节相机的视觉范围,仅需相机相对机械臂运动即可实现调节相机的视觉范围的目的。
技术研发人员:王小飞,宋奋韬,窦强将,张青锋
受保护的技术使用者:武汉路特斯科技有限公司
技术研发日:20230323
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!