一种动态目标跟瞄模拟靶标的制作方法
本技术涉及光电检测,特别涉及一种动态目标跟瞄模拟靶标。
背景技术:
1、动态靶标是一种,普遍使用的室内检测光电仪器跟踪性能的装置,可以在对光电仪器的跟踪系统进行检测时提供模拟的目标空间,目前的靶标无法同时完成升降和旋转功能,使用不够便捷,导致模拟效果不好。
技术实现思路
1、本实用新型的目的在于克服现有技术的不足,提供一种动态目标跟瞄模拟靶标。
2、本实用新型的目的是通过以下技术方案来实现的:
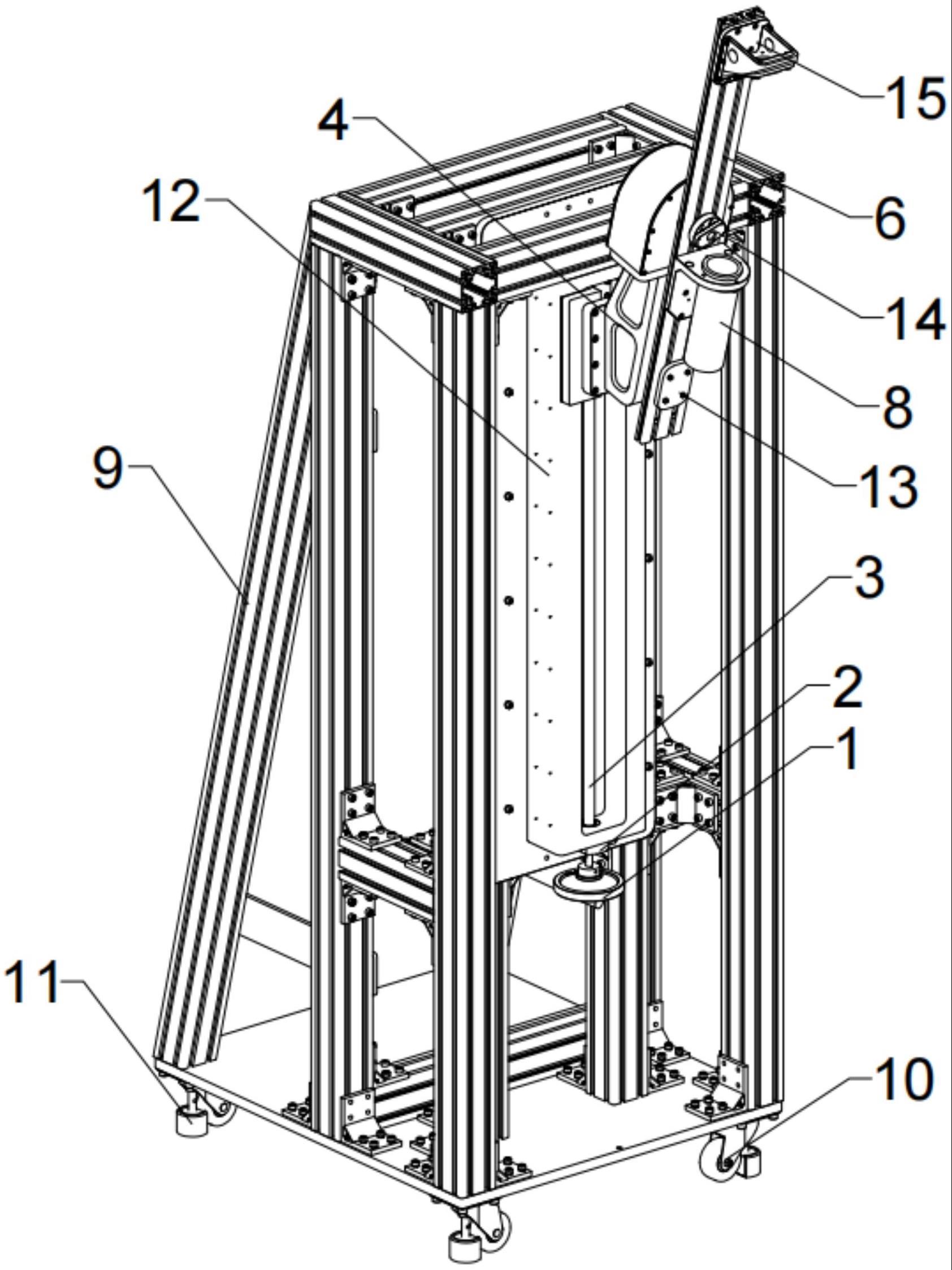
3、一种动态目标跟瞄模拟靶标,包括基础框架组件、升降组件、轴系组件和旋转臂组件,所述基础框架组件上滑动设置有所述升降组件,所述升降组件与所述旋转臂组件之间通过所述轴系组件固定连接;所述升降组件包括手轮、轴承座、丝杠和支撑臂,所述手轮设置在所述丝杠的下端,所述支撑臂设置在所述丝杠的上端,所述轴承座设置在所述丝杠上,所述轴系组件固定设置在所述支撑臂上端;所述轴系组件包括控制器和力矩电机,所述控制器与所述旋转臂组件之间通过所述力矩电机连接;所述旋转臂组件包括旋转支撑板、反射镜和平行光管,所述旋转支撑板与所述力矩电机连接,所述反射镜固定设置在所述旋转支撑板的端部,所述平行光管固定设置在所述旋转支撑板的中部。
4、进一步地,所述基础框架组件包括支撑架、滑轮和可调垫脚,所述滑轮和所述可调垫脚均固定设置在所述支撑架底部。
5、进一步地,所述基础框架组件还包括回形立板,所述回形立板竖直放置在所述支撑架侧壁上,所述升降组件固定设置在所述回形立板内。
6、进一步地,所述轴系组件还包括编码器,所述编码器的输入端与所述力矩电机连接,所述编码器的输出端与所述控制器连接。
7、进一步地,所述旋转臂组件还包括配重块和镭射找准器,所述镭射找准器固定设置在所述平行光管与所述反射镜之间。
8、进一步地,所述旋转臂组件还包括反射镜座,所述反射镜座固定设置在所述旋转支撑板上,所述反射镜旋转设置在所述反射镜座上。
9、进一步地,所述反射镜为精退火k9反射玻璃。
10、进一步地,所述平行光管为反射式平行光管。
11、本实用新型的有益效果是:
12、1)通过设置升降组件、轴系组件和旋转臂组件,升降组件与旋转臂组件通过轴系组件连接,升降组件的垂直运动带动旋转臂组件垂直运动,轴系组件带动旋转臂组件旋转,实现靶标的升降和旋转功能。
13、2)基础框架组件设置有可调垫脚,用于调整基础框架的水平位置,使升降组件垂直于水平面放置,从而使靶标放置水平稳定、运行平稳。
14、3)轴系组件包括控制器、编码器和力矩电机,控制器控制力矩电机工作,编码器实时采集力矩电机的工作状态,并将采集到的数据传输至控制器,控制器根据接收到的数据对力矩电机的控制指令即时做出调整,实现对力矩电机的闭环控制,对力矩电机的控制更加精准。
技术特征:
1.一种动态目标跟瞄模拟靶标,其特征在于:包括基础框架组件、升降组件、轴系组件和旋转臂组件,所述基础框架组件上滑动设置有所述升降组件,所述升降组件与所述旋转臂组件之间通过所述轴系组件固定连接;
2.根据权利要求1所述的一种动态目标跟瞄模拟靶标,其特征在于:所述基础框架组件包括支撑架(9)、滑轮(10)和可调垫脚(11),所述滑轮(10)和所述可调垫脚(11)均固定设置在所述支撑架(9)底部。
3.根据权利要求2所述的一种动态目标跟瞄模拟靶标,其特征在于:所述基础框架组件还包括回形立板(12),所述回形立板(12)竖直放置在所述支撑架(9)侧壁上,所述升降组件固定设置在所述回形立板(12)内。
4.根据权利要求1-3任一项所述的一种动态目标跟瞄模拟靶标,其特征在于:所述轴系组件还包括编码器,所述编码器的输入端与所述力矩电机(5)连接,所述编码器的输出端与所述控制器连接。
5.根据权利要求1所述的一种动态目标跟瞄模拟靶标,其特征在于:所述旋转臂组件还包括配重块(13)和镭射找准器(14),所述镭射找准器(14)固定设置在所述平行光管(8)与所述反射镜(7)之间。
6.根据权利要求5所述的一种动态目标跟瞄模拟靶标,其特征在于:所述旋转臂组件还包括反射镜座(15),所述反射镜座(15)固定设置在所述旋转支撑板(6)上,所述反射镜(7)旋转设置在所述反射镜座(15)上。
7.根据权利要求6所述的一种动态目标跟瞄模拟靶标,其特征在于:所述反射镜(7)为精退火k9反射玻璃。
8.根据权利要求6或7所述的一种动态目标跟瞄模拟靶标,其特征在于:所述平行光管(8)为反射式平行光管。
技术总结
本技术公开了一种动态目标跟瞄模拟靶标,包括基础框架组件、升降组件、轴系组件和旋转臂组件,基础框架组件上滑动设置有升降组件,升降组件与旋转臂组件之间通过轴系组件固定连接;升降组件包括手轮、轴承座、丝杠和支撑臂,轴系组件固定设置在支撑臂上端;轴系组件包括控制器和力矩电机,控制器与旋转臂组件之间通过力矩电机连接;旋转臂组件包括旋转支撑板、反射镜和平行光管,旋转支撑板与力矩电机连接。通过设置升降组件、轴系组件和旋转臂组件,升降组件与旋转臂组件通过轴系组件连接,升降组件的垂直运动带动旋转臂组件垂直运动,轴系组件带动旋转臂组件旋转,实现靶标的升降和旋转功能。
技术研发人员:万庆华,张印,葛明
受保护的技术使用者:四川中科友成科技有限公司
技术研发日:20230407
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!