一种用于管道检测的履带管道机器人的制作方法
本技术涉及管道检测设备,具体为一种用于管道检测的履带管道机器人。
背景技术:
1、在重大民生领域,如自来水、气、油等物质在输送时,管道是使用最广泛的传输形式,而管道在使用中,因不同原因造成管道堵塞和管道损伤,易造成供水污染、供气供油泄漏引发危险,需要通过履带式管道机器人对管道进行检修。
2、中国专利申请号201922376657.9公开的一种用于管道内检测的履带机器人,包括检测装置、主梁、第一轮组、第二轮组、第一履带、第二履带、第一驱动装置和第二驱动装置,所述主梁包括位于其底面并向下延伸的梁下板;所述梁下板分别与所述第一内框架和所述第二内框架通过第一固定轴和第二固定轴相连,所述第一内框架可带动所述第一履带围绕所述第一固定轴向外转动;所述第二内框架可带动所述第二履带围绕所述第二固定轴向外转动;还包括履带外转机构,以控制所述第一履带和第二履带向外转动的第一角度和第二角度;所述第一角度和所述第二角度均小于90度。
3、虽然具有机器人的高度和宽度可按照管道内流体情况和管道大小调节的有益效果,但是该机器人的履带只和管道的底部一个方向进行接触,接触面积较小,只靠自身重力与管道内壁产生摩擦力,遇到残留流体时可能会出现打滑的现象,除此之外该机器人不具备清扫功能,管道内部会有残留污渍影响检测结果。
技术实现思路
1、本实用新型的目的在于提供一种用于管道检测的履带管道机器人,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
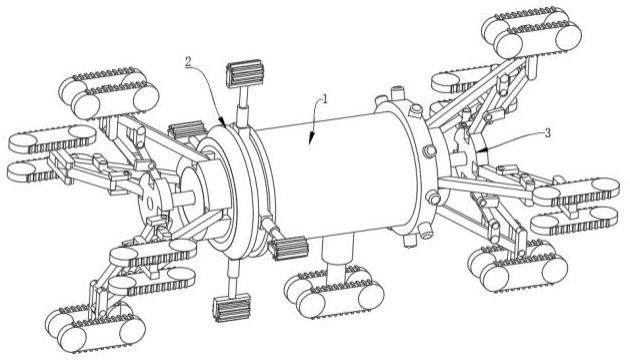
3、本实用新型为一种用于管道检测的履带管道机器人,包括一种用于管道检测的履带管道机器人,包括机体、清扫组件和伸缩组件,所述机体包括内腔、第一伸缩杆、第二伸缩杆、驱动轮、扫描装置,所述内腔开设在机体的内部,所述第一伸缩杆设置在内腔的中心处,所述第一伸缩杆延伸至机体的外侧,所述伸缩组件设置在机体的两端,所述第二伸缩杆安装在机体的外侧壁上,所述驱动轮安装在第二伸缩杆的输出端上,所述扫描装置安装在机体的外侧壁上,这样设置的目的是对管道进行检测。
4、进一步地,所述伸缩组件包括支撑座、第一连杆、第二连杆、第三连杆、支撑杆、履带轮。
5、进一步地,所述支撑座安装在第一伸缩杆的输出端上,所述第一连杆的一端转动连接在机体的外壁上。
6、进一步地,所述第二连杆的一端转动连接在支撑座的外壁上,所述第二连杆远离支撑座的一端转动连接在第一连杆的中部。
7、所述第三连杆的一端转动连接在第二连杆的中部,所述第一连杆远离机体的一端转动连接在支撑杆的中部内侧壁上,所述第三连杆远离支撑座的一端转动连接在支撑杆的底端,这样设置的目的是对履带轮实现收缩。
8、进一步地,所述清扫组件包括套环、第三伸缩杆、支架、毛刷,所述清扫组件设置在机体外壁上,所述套环安装在机体外侧壁上,所述套环内侧壁与机体外侧壁紧密贴合,所述套环的外侧壁上开设有卡槽,这样设置的目的是方便第三伸缩杆在套环外侧进行滑动,绕着机体进行转动。
9、进一步地,所述第三伸缩杆的底端卡接在卡槽内部,所述第三伸缩杆的底端与卡槽的内部进行滑动连接,所述支架固定连接在第三伸缩杆的输出端上,所述毛刷安装在支架的内侧壁上,这样设置的目的是对管道内壁进行清理。
10、本实用新型具有以下有益效果:
11、(1)本实用新型通过伸缩组件的设置,在使用时,将履带管道机器人放入管道内部,启动第一伸缩杆,第一伸缩杆的输出端向机体外部伸出,将支撑座外壁上的第二连杆撑起,第二连杆撑起后,带动第一连杆、第三连杆和支撑杆进行转动,对机体两端的四个履带轮进行撑起,撑起到适合管径大小的距离,四个履带轮撑起时与管道内壁不同的方向接触,增加了履带盒管道之间的接触面积,而且受力也均匀,从而在适用不同管径大小的管道,同时也避免了机器人在管道内部打滑的情况,增强了实用性。
12、(2)本实用新型通过清扫组件的设置,第三伸缩杆在套环外侧进行滑动,绕着机体进行转动,对管道内壁进行清理,有利于机器人对管道检测。
13、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种用于管道检测的履带管道机器人,包括机体(1)、清扫组件(2)和伸缩组件(3),其特征在于:所述机体(1)包括内腔(101)、第一伸缩杆(102)、第二伸缩杆(103)、驱动轮(104)、扫描装置(105),所述内腔(101)开设在机体(1)的内部,所述第一伸缩杆(102)设置在内腔(101)的中心处,所述第一伸缩杆(102)延伸至机体(1)的外侧,所述伸缩组件(3)设置在机体(1)的两端,所述第二伸缩杆(103)安装在机体(1)的外侧壁上,所述驱动轮(104)安装在第二伸缩杆(103)的输出端上,所述扫描装置(105)安装在机体(1)的外侧壁上;
2.根据权利要求1所述的一种用于管道检测的履带管道机器人,其特征在于:所述支撑座(301)安装在第一伸缩杆(102)的输出端上,所述第一连杆(302)的一端转动连接在机体(1)的外壁上。
3.根据权利要求1所述的一种用于管道检测的履带管道机器人,其特征在于:所述第二连杆(303)的一端转动连接在支撑座(301)的外壁上,所述第二连杆(303)远离支撑座(301)的一端转动连接在第一连杆(302)的中部。
4.根据权利要求1所述的一种用于管道检测的履带管道机器人,其特征在于:所述第三连杆(304)的一端转动连接在第二连杆(303)的中部,所述第一连杆(302)远离机体(1)的一端转动连接在支撑杆(305)的中部内侧壁上,所述第三连杆(304)远离支撑座(301)的一端转动连接在支撑杆(305)的底端。
5.根据权利要求1所述的一种用于管道检测的履带管道机器人,其特征在于:所述清扫组件(2)包括套环(201)、第三伸缩杆(202)、支架(203)、毛刷(204),所述清扫组件设置在机体(1)外壁上,所述套环(201)安装在机体(1)外侧壁上,所述套环(201)内侧壁与机体(1)外侧壁紧密贴合,所述套环(201)的外侧壁上开设有卡槽。
6.根据权利要求5所述的一种用于管道检测的履带管道机器人,其特征在于:所述第三伸缩杆(202)的底端卡接在卡槽内部,所述第三伸缩杆(202)的底端与卡槽的内部进行滑动连接,所述支架(203)固定连接在第三伸缩杆(202)的输出端上,所述毛刷(204)安装在支架(203)的内侧壁上。
技术总结
本技术涉及管道检测技术领域,且公开了一种用于管道检测的履带管道机器人,包括机体、清扫组件和伸缩组件,机体包括内腔、第一伸缩杆、第二伸缩杆、驱动轮、扫描装置,内腔开设在机体的内部,第一伸缩杆设置在内腔的中心处,第一伸缩杆延伸至机体的外侧,伸缩组件设置在机体的两端,第二伸缩杆安装在机体的外侧壁上,驱动轮安装在第二伸缩杆的输出端上,扫描装置安装在机体的外侧壁上。本技术通过伸缩组件的设置,将履带管道机器人放入管道内部,启动第一伸缩杆,对机体两端的四个履带轮进行撑起,撑起到适合管径大小的距离,从而适合不同管径大小的管道,减少了更换设备的成本,增强了实用性。
技术研发人员:林茁,洪得圣,袁江锌,贾承龙,梁立风,李小康
受保护的技术使用者:河南城拜检测技术有限公司
技术研发日:20230612
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!