一种车灯自动化设备用地框架的制作方法
本技术属于地框架,具体地说,涉及一种车灯自动化设备用地框架。
背景技术:
1、车灯自动化设备用地框架一般铺设在地面上,然后机器人底座固定在其上,用于完成各种加工操作,其中机器人为多轴或关节型机械臂。由于机器人滑动的路径一般较长,所以机器人地框架的长度一般也相应较大。
2、现有的机器人地框架仅仅是一个方形平台,然后在其四周围设护栏,安全性较差,且方形平台直接固定在地面,容易受到地面发潮锈蚀,工人靠近维修也极为不方便。因此,需要一种简便性强,适用于机器人底座的地框架,并且需要兼具应用的广泛性。
技术实现思路
1、有鉴于此,本实用新型所要解决的技术问题是提供了一种车灯自动化设备用地框架,用于避免以往仅仅采用方向平台作为地框架安装自动化机器人底座,容易受潮锈蚀,安全性及稳定性较差的麻烦。
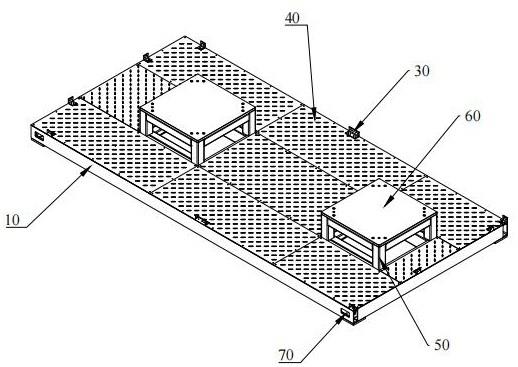
2、为了解决上述技术问题,本实用新型公开了一种车灯自动化设备用地框架,包括:
3、地笼框体,地笼框体成网格状;
4、焊接于地笼框体底部的多个支撑片,支撑片安装膨胀螺栓;
5、通过螺丝固定于地笼框体上端边缘的多个角铁片;
6、铺设于地笼框体上端的花纹铝板,花纹铝板裸露出中间间隔的两个网格;
7、焊接于网格的立框;
8、设置于立框上部的安装面板,安装面板用于安装机械臂底座。
9、根据本实用新型一实施方式,其中上述地笼框体四周设置有通槽孔。
10、根据本实用新型一实施方式,其中上述地笼框体由u型钢相互焊接成型。
11、根据本实用新型一实施方式,其中上述花纹铝板设置为多块,且表面设置有椭圆形凸起。
12、根据本实用新型一实施方式,其中上述安装面板与立框焊接,表面设置有安装孔。
13、与现有技术相比,本实用新型可以获得包括以下技术效果:
14、通过先利用膨胀螺栓固定地笼框体,然后在铺设花纹铝板,裸露出立框,通过在立框上固定安装面板,实现自动化设备底座安装;此外角铁片可以便于安装外侧围栏或者靠设至墙面。
15、当然,实施本实用新型的任一产品必不一定需要同时达到以上所述的所有技术效果。
技术特征:
1.一种车灯自动化设备用地框架,其特征在于,包括:
2.根据权利要求1所述的车灯自动化设备用地框架,其特征在于,其中所述地笼框体四周设置有通槽孔。
3.根据权利要求1所述的车灯自动化设备用地框架,其特征在于,其中所述地笼框体由u型钢相互焊接成型。
4.根据权利要求1所述的车灯自动化设备用地框架,其特征在于,其中所述花纹铝板设置为多块,且表面设置有椭圆形凸起。
5.根据权利要求1所述的车灯自动化设备用地框架,其特征在于,其中所述安装面板与所述立框焊接,表面设置有安装孔。
技术总结
本技术公开了一种车灯自动化设备用地框架,包括:地笼框体,地笼框体成网格状;焊接于地笼框体底部的多个支撑片,支撑片安装膨胀螺栓;通过螺丝固定于地笼框体上端边缘的多个角铁片;铺设于地笼框体上端的花纹铝板,花纹铝板裸露出中间间隔的两个网格;焊接于网格的立框;设置于立框上部的安装面板,安装面板用于安装机械臂底座。本技术通过先利用膨胀螺栓固定地笼框体,然后在铺设花纹铝板,裸露出立框,通过在立框上固定安装面板,实现自动化设备底座安装;此外角铁片可以便于安装外侧围栏或者靠设至墙面。
技术研发人员:彭爱堂,俞振富,蒋荣俊,倪军强
受保护的技术使用者:江苏擎天车业科技有限公司
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!