一种机器人用驱动装置的制作方法
本技术涉及管道检测机器人,更具体地说,本技术涉及一种机器人用驱动装置。
背景技术:
1、随着科技的飞速发展,现在机器人运用的范围也是越发广泛,管道检测也不例外,传统的人工检测管道一般是通过带有摄像头的机器人进入管道,操作人员可使用控制台控制机器人驱动装置使机器人在管道内前进,通过摄像头看到管道内部的具体情况,但是由于机器人机身大小的固定,使机器人无法进入比它机身小的管道,从而无法检测到部分比机器人机身小的管道,让管道留下了不少安全隐患。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供一种机器人用驱动装置,以解决管道检测机器人的问题。
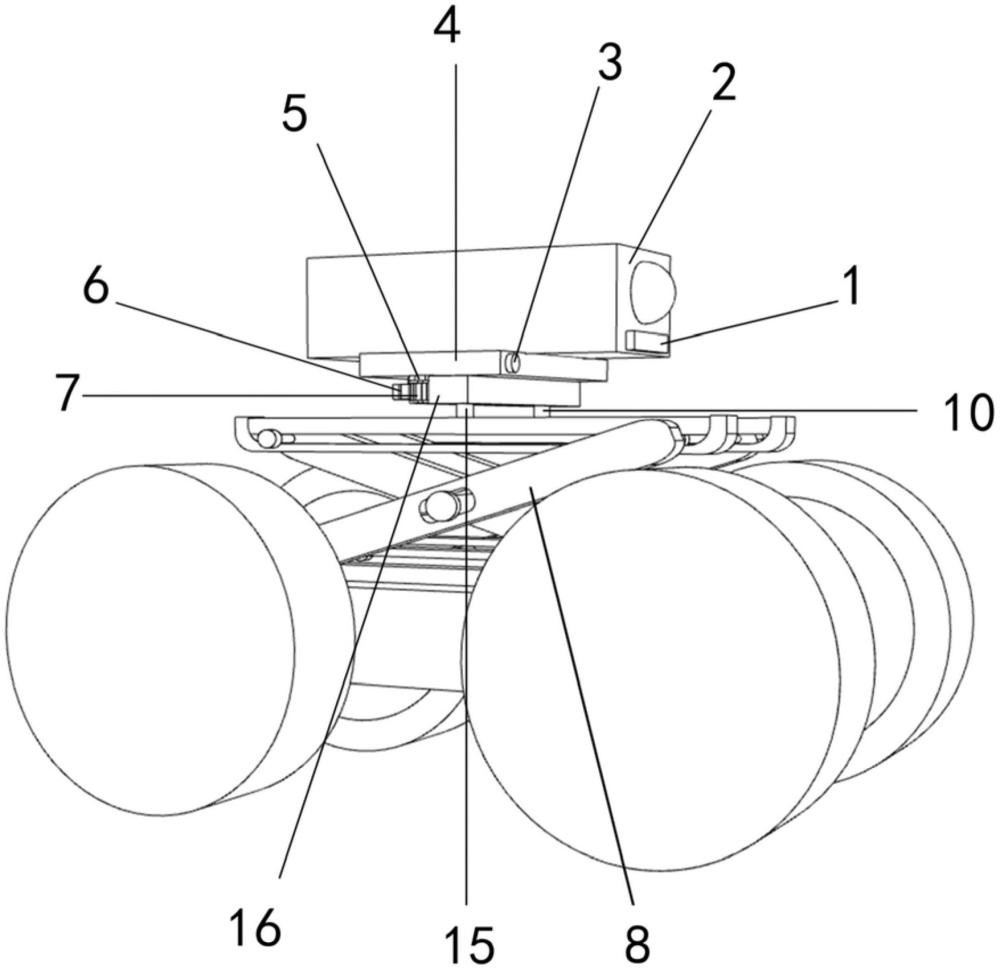
2、为解决上述技术问题,本实用新型提供如下技术方案:一种机器人用驱动装置,包括机器人驱动装置,驱动装置;第一圆柱和第二圆柱,所述第一圆柱和第二圆柱的外表面顶端相对设置在驱动装置下表面长度方向的两侧,所述第一圆柱和第二圆柱外表面的底端分别固定套接有第一齿轮和第二齿轮,通过驱动装置可使第一圆柱和第二圆柱转动;滑动架,所述滑动架的外表面顶端固定连接在驱动装置的下表面底部且靠近第一齿轮和第二齿轮的前端,所述滑动架的长度方向相对滑动连接有第一滑块和第二滑块,所述第一滑块和第二滑块外表面的底部分别固定连接在机器人驱动装置两侧车轮支架顶端的中间;第一连接架和第二连接架,所述第一连接架和第二连接架的外表面的顶端固定连接在驱动装置的下表面,所述第一连接架和第二连接架设置在第一齿轮和第二齿轮与滑动架之间,所述第一连接架和第二连接架内部分别设置有第一履带和第二履带,所述第一履带和第二履带靠近滑动架的一边分别固定连接有第一滑块和第二滑块,所述第一履带和第二履带远离第一滑块和第二滑块的另一边分别与第一齿轮和第二齿轮相互啮合,光敏元件3与长条灯1电性连接。
3、其中,包括摄像头、光敏元件和长条灯,所述摄像头的下表面固定连接在驱动装置外表面的顶部,光敏元件的一侧固定连接在驱动装置外表面的前端,长条灯的一侧固定连接在摄像头外表面前端的下方且靠近摄像头。
4、与现有技术相比,本实用新型的有益效果是:
5、本实用新型通过驱动装置外表面底部固定安装有圆柱且圆柱外表面远离驱动装置的一端固定安装有齿轮,齿轮的外沿与履带相互啮合,履带远离齿轮的一端固定安装有滑块,滑块通过连接柱与机器人驱动器固定连接,操控驱动装置使齿轮运动从而带动履带运动,当履带被齿轮带动时滑块也会随之运动,利用上述结构,达到了管道机器人为了进入不同大小的管道进行收缩折叠的效果;
6、本实用新型通过光敏元件,感应到管道内光线较暗时自动开启长条灯,利用上述结构,达到了管道检测机器人进入管道后为了方便通过摄像头观察及时补光的效果。
技术特征:
1.一种机器人用驱动装置,包括机器人驱动装置(8),其特征在于,
2.根据权利要求1所述的一种机器人用驱动装置,其特征在于,还包括摄像头(2)、光敏元件(3)和长条灯(1),所述摄像头(2)的下表面固定连接在驱动装置(4)外表面的顶部,光敏元件(3)的一侧固定连接在驱动装置(4)外表面的前端,长条灯(1)的一侧固定连接在摄像头(2)外表面前端的下方且靠近摄像头(2),所述光敏元件(3)与长条灯(1)电性连接。
技术总结
本技术公开了一种机器人用驱动装置,包括驱动装置,滑动架,长条灯,驱动装置外表面底部固定安装有两个圆柱且分别靠左边和右边,圆柱外表面远离驱动装置的一端固定安装有齿轮,齿轮的外沿与履带相互啮合,履带远离齿轮的一端固定安装有滑块,滑块可在滑动架内滑动,驱动装置外表面前端固定安装有光敏元件。本技术通过操控驱动装置使齿轮和齿轮同时向内运动时,分别带动履带和履带靠近齿轮的一边向外运动,从而履带远离齿轮的一边则被别带动滑块和滑块向内运动,达到有效的收缩机器人体积的效果,方便机器人进入不同大小的管道中进行检测,提高工作效率。
技术研发人员:张永富
受保护的技术使用者:东营市瀚海智能机器有限公司
技术研发日:20230714
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!