一种基于机器人自动化三维扫描装置的制作方法
本技术属于三维扫描装置,尤其涉及一种基于机器人自动化三维扫描装置。
背景技术:
1、随着社会的进步和科技水平的发展,三维扫描技术也得到了快速发展,三维扫描可用于扫描人脸或实物,例如,在医学整形领域就需要对脸部进行全方位的扫描。
2、现有的三维扫描装置在对人脸进行扫描时,通过三维扫描测头进行工作,但是,现有技术不具有对三维扫描测头的防护结构,导致三维扫描测头在不使用时,容易沾染灰尘,或由于误触而造成损坏。
技术实现思路
1、针对现有技术不具有对三维扫描测头的防护结构,导致三维扫描测头在不使用时,容易沾染灰尘,或由于误触而造成损坏的问题,本实用新型提供一种基于机器人自动化三维扫描装置。
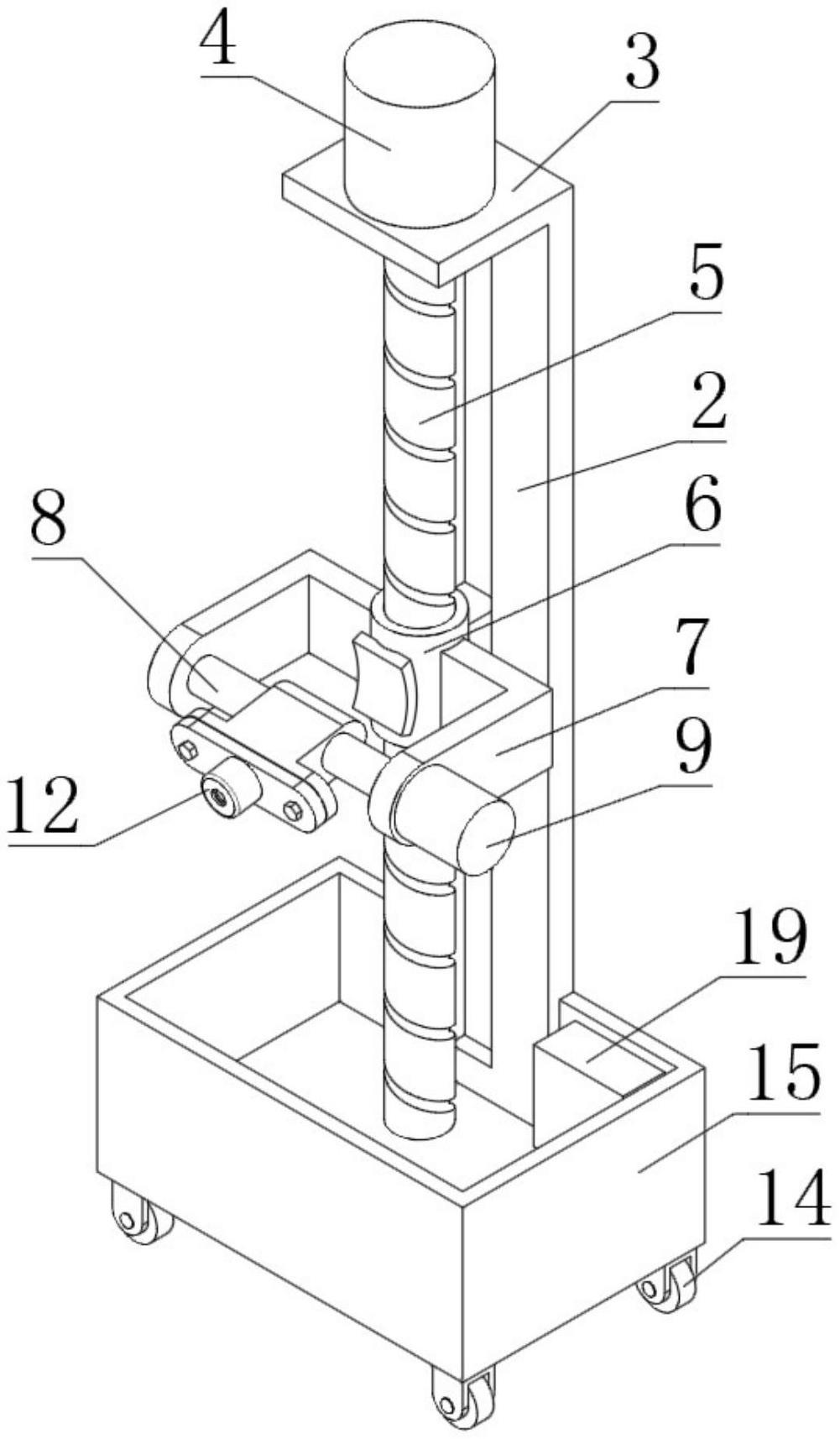
2、为了实现上述目的,本实用新型采用了如下技术方案:一种基于机器人自动化三维扫描装置,包括底座,所述底座上固定设置有支板,所述支板顶端固定设置有顶板,所述顶板上固定设置有第一电机,所述顶板与底座之间转动设置有丝杆,所述第一电机的输出端与丝杆固定,所述丝杆上螺纹连接有螺套,所述螺套外侧壁固定设置有两个l型板,两个所述l型板之间转动设置有转轴,其中一个所述l型板外侧壁固定设置有第二电机,所述第二电机的输出端与转轴固定,所述转轴上固定设置有转动块,所述转动块侧端固定设置有安装板,所述安装板一侧固定设置有三维扫描测头,所述螺套外侧壁设置有用于接触三维扫描测头的防护垫。
3、优选的,所述底座底部安装有四个万向轮,四个所述万向轮呈矩形分布。
4、优选的,所述底座上外沿固定设置有围挡,所述围挡用于收纳第二电机和两个l型板。
5、优选的,所述防护垫设置为弧形结构,且所述防护垫为弹性垫。
6、优选的,所述三维扫描测头一侧固定设置有固定板,所述固定板上贯穿设置有螺栓,所述安装板上开设有与螺栓相适配的螺孔。
7、优选的,所述螺套外侧壁固定设置有限位块,所述支板侧壁开设有与限位块滑动配合的限位槽。
8、优选的,所述围挡的内侧壁安装有控制机箱,所述控制机箱的内腔设有蓄电池组、plc控制器和通讯模块。
9、与现有技术相比,本实用新型的有益效果为:
10、1、通过第一电机带动丝杆转动,使得螺套沿着丝杆向上或向下移动,调节螺套的位置,进而调节三维扫描测头的高度,通过第二电机带动转轴转动,转轴带动转动块转动,转动块带动三维扫描测头转动,调节三维扫描测头的俯仰角度,使用更加方便。
11、2、当不使用时,使三维扫描测头转动至接触防护垫,通过防护垫对三维扫描测头的镜头进行防护,减少灰尘干扰,也可将第二电机和两个l型板及三维扫描测头移动至围挡内侧,进行防护,尽量避免被碰撞。
技术特征:
1.一种基于机器人自动化三维扫描装置,包括底座(1),其特征在于,所述底座(1)上固定设置有支板(2),所述支板(2)顶端固定设置有顶板(3),所述顶板(3)上固定设置有第一电机(4),所述顶板(3)与底座(1)之间转动设置有丝杆(5),所述第一电机(4)的输出端与丝杆(5)固定,所述丝杆(5)上螺纹连接有螺套(6),所述螺套(6)外侧壁固定设置有两个l型板(7),两个所述l型板(7)之间转动设置有转轴(8),其中一个所述l型板(7)外侧壁固定设置有第二电机(9),所述第二电机(9)的输出端与转轴(8)固定,所述转轴(8)上固定设置有转动块(10),所述转动块(10)侧端固定设置有安装板(11),所述安装板(11)一侧固定设置有三维扫描测头(12),所述螺套(6)外侧壁设置有用于接触三维扫描测头(12)的防护垫(13)。
2.根据权利要求1所述的一种基于机器人自动化三维扫描装置,其特征在于,所述底座(1)底部安装有四个万向轮(14),四个所述万向轮(14)呈矩形分布。
3.根据权利要求1所述的一种基于机器人自动化三维扫描装置,其特征在于,所述底座(1)上外沿固定设置有围挡(15),所述围挡(15)用于收纳第二电机(9)和两个l型板(7)。
4.根据权利要求1所述的一种基于机器人自动化三维扫描装置,其特征在于,所述防护垫(13)设置为弧形结构,且所述防护垫(13)为弹性垫。
5.根据权利要求1所述的一种基于机器人自动化三维扫描装置,其特征在于,所述三维扫描测头(12)一侧固定设置有固定板(16),所述固定板(16)上贯穿设置有螺栓(17),所述安装板(11)上开设有与螺栓(17)相适配的螺孔。
6.根据权利要求1所述的一种基于机器人自动化三维扫描装置,其特征在于,所述螺套(6)外侧壁固定设置有限位块(18),所述支板(2)侧壁开设有与限位块(18)滑动配合的限位槽。
7.根据权利要求3所述的一种基于机器人自动化三维扫描装置,其特征在于,所述围挡(15)的内侧壁安装有控制机箱(19),所述控制机箱(19)的内腔设有蓄电池组、plc控制器和通讯模块。
技术总结
本技术公开了一种基于机器人自动化三维扫描装置,包括底座,底座上固定设置有支板,支板顶端固定设置有顶板,顶板上固定设置有第一电机,顶板与底座之间转动设置有丝杆,丝杆上螺纹连接有螺套,螺套外侧壁固定设置有两个L型板,两个L型板之间转动设置有转轴,其中一个L型板外侧壁固定设置有第二电机,转轴上固定设置有转动块,转动块侧端固定设置有安装板,安装板一侧固定设置有三维扫描测头,螺套外侧壁设置有用于接触三维扫描测头的防护垫。当不使用时,使三维扫描测头转动至接触防护垫,通过防护垫对三维扫描测头的镜头进行防护,减少灰尘干扰,也可将第二电机和两个L型板及三维扫描测头移动至围挡内侧,进行防护,尽量避免被碰撞。
技术研发人员:张选福,武建,谢磊,邹宇航,杨时奇
受保护的技术使用者:长沙嘉森测绘科技有限公司
技术研发日:20230724
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!