一种多尺度运动模糊图像的提取装置
本技术涉及图像提取,具体涉及一种多尺度运动模糊图像的提取装置。
背景技术:
1、在图像获取的过程中,拍摄者可能会在不同运动情况下进行拍摄照片,比如在驾驶过程中进行拍摄,或者拍摄者因所处环境不稳,或者其他因素在拍摄过程中发生晃动,都会导致拍摄的照片出现不同程度的模糊,现有技术中,如果想把这些模糊图像进行应用,将模糊照片根据一些图像处理的算法,将模糊图像清晰化后再进行后续应用,因此,我们需要在同一地点提取大量模糊图像和清晰图像进行对比,将不同运动情况下的模糊图像还原成清晰图像,进而可以进行后续应用,故我们亟需一种模糊图像的提取装置,便于我们提取多尺度运动的模糊图像。
技术实现思路
1、为了弥补以上不足,本实用新型提供了一种多尺度运动模糊图像的提取装置,以便于提取多尺度运动的模糊图像。
2、本实用新型是这样实现的:
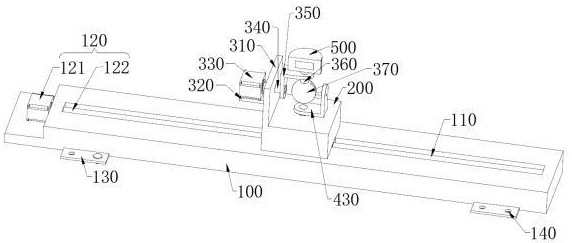
3、一种多尺度运动模糊图像的提取装置,包括:移动平台、滑槽、驱动件、滑动机构、旋转机构、辅助旋转机构和拍摄装置;滑槽开设于移动平台上;驱动件贯穿于滑槽;滑动机构设置于移动平台上,且滑动机构与滑槽滑动配合设置;旋转机构设置于滑动机构上;辅助旋转机构与旋转机构配合设置;拍摄装置设置于旋转机构的上方。
4、另外,本实用新型提供的上述技术方案中的一种多尺度运动模糊图像的提取装置还可以具有如下附加技术特征:
5、在上述技术方案中,驱动件包括:第一电机和螺纹杆;第一电机固定连接于移动平台;螺纹杆传动连接于第一电机,且螺纹杆贯穿于滑槽。
6、在上述技术方案中,滑动机构包括:滑块、固定箱和通孔;滑块螺纹连接于螺纹杆,且滑块限位滑动连接于滑槽;固定箱固定连接于滑块;多个通孔均开设于固定箱上。
7、在上述技术方案中,旋转机构包括:固定板、支撑板、第二电机、第一转杆、第一支架、第二转杆和球体;固定板固定连接于固定箱的上方;支撑板固定连接于固定箱的一侧;第二电机设置于支撑板;第一转杆传动连接于第二电机,且第一转杆贯穿于固定板;第一支架为l型,且第一支架的竖板固定连接于第一转杆远离第二电机一侧;第二转杆转动连接于第一支架的横板;球体固定连接于第二转杆。
8、在上述技术方案中,辅助旋转机构包括:第三电机、第三转杆、第二支架、第四转杆和弧形槽;第三电机设置于固定箱内;第三转杆传动连接于第三电机的输出端;第二支架为l型,且第二支架的横板固定连接于第三转杆远离第三电机一侧;第四转杆固定连接于第二支架的竖板;弧形槽开设于球体上,且第四转杆限位滑动连接于弧形槽。
9、在上述技术方案中,还包括:侧翼、固定孔和固定螺栓;多个侧翼设置于移动平台的两侧;多个固定孔均开设于侧翼上;多个固定螺栓与多个固定孔配合设置。
10、本实用新型与现有技术相比,具有以下有益效果:
11、通过在移动平台上设置有驱动件,利用驱动件带动滑动机构在移动平台上进行移动,并在滑动机构上设置于旋转机构和辅助旋转机构,并将拍摄装置设置在旋转机构上,利用驱动件改变驱动速度,利用旋转机构和辅助旋转机构改变拍摄装置的转动方向以及倾斜的角度,进而拍摄装置可以拍摄多尺度运动下不同的模糊图像,从而提取多组模糊图像和清晰图像的图像对,因此,将多组图像对进行对比之后,后期根据一些图像处理的算法,将模糊图像清晰化,然后图像进行后续应用。
技术特征:
1.一种多尺度运动模糊图像的提取装置,其特征在于,包括:
2.根据权利要求1所述的一种多尺度运动模糊图像的提取装置,其特征在于,所述驱动件包括:
3.根据权利要求2所述的一种多尺度运动模糊图像的提取装置,其特征在于,所述滑动机构包括:
4.根据权利要求3所述的一种多尺度运动模糊图像的提取装置,其特征在于,所述旋转机构包括:
5.根据权利要求4所述的一种多尺度运动模糊图像的提取装置,其特征在于,所述辅助旋转机构包括:
6.根据权利要求1所述的一种多尺度运动模糊图像的提取装置,其特征在于,还包括:
技术总结
本技术提供了一种多尺度运动模糊图像的提取装置,属于图像提取技术领域,包括:移动平台、滑槽、驱动件、滑动机构、旋转机构、辅助旋转机构和拍摄装置;驱动件贯穿于滑槽;滑动机构设置于移动平台上,且滑动机构与滑槽滑动配合设置;旋转机构设置于滑动机构上;辅助旋转机构与旋转机构配合设置;拍摄装置设置于旋转机构的上方;通过驱动件带动滑动机构在移动平台上进行移动,并在滑动机构上设置于旋转机构和辅助旋转机构,将拍摄装置设置在旋转机构上,利用驱动件改变驱动速度,利用旋转机构和辅助旋转机构改变拍摄装置的转动方向以及倾斜的角度,进而拍摄装置可以拍摄多尺度运动下不同的模糊图像,从而提取多组模糊图像和清晰图像的图像对。
技术研发人员:王茂
受保护的技术使用者:四川警察学院
技术研发日:20230825
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!