一种履带式管道检测机器人的制作方法
本技术涉及检测机器,具体为一种履带式管道检测机器人。
背景技术:
1、检测机器是一种用于对某种物体根据需求进行各项检测时所使用的设备,其中在对供水管道内的淤泥检测时需要使用到相应的检测机器人,通过检测机器人能够检测供水管道中淤泥的情况,后期以便工作人员定期对供水管道进行清理。
2、在实现本申请过程中,发明人发现该技术中至少存在如下问题:现有的通过滚轮式的机器人,当淤泥较多时淤泥会存在限制滚轮转动的情况,对机器人的行进造成影响。
技术实现思路
1、本实用新型的目的在于提供一种履带式管道检测机器人,以解决上述背景技术中提出现有的通过滚轮式的机器人,在淤泥较多时限制滚轮转动,对机器人的行进造成影响的问题。
2、本实用新型提供一种履带式管道检测机器人,采用如下的技术方案;
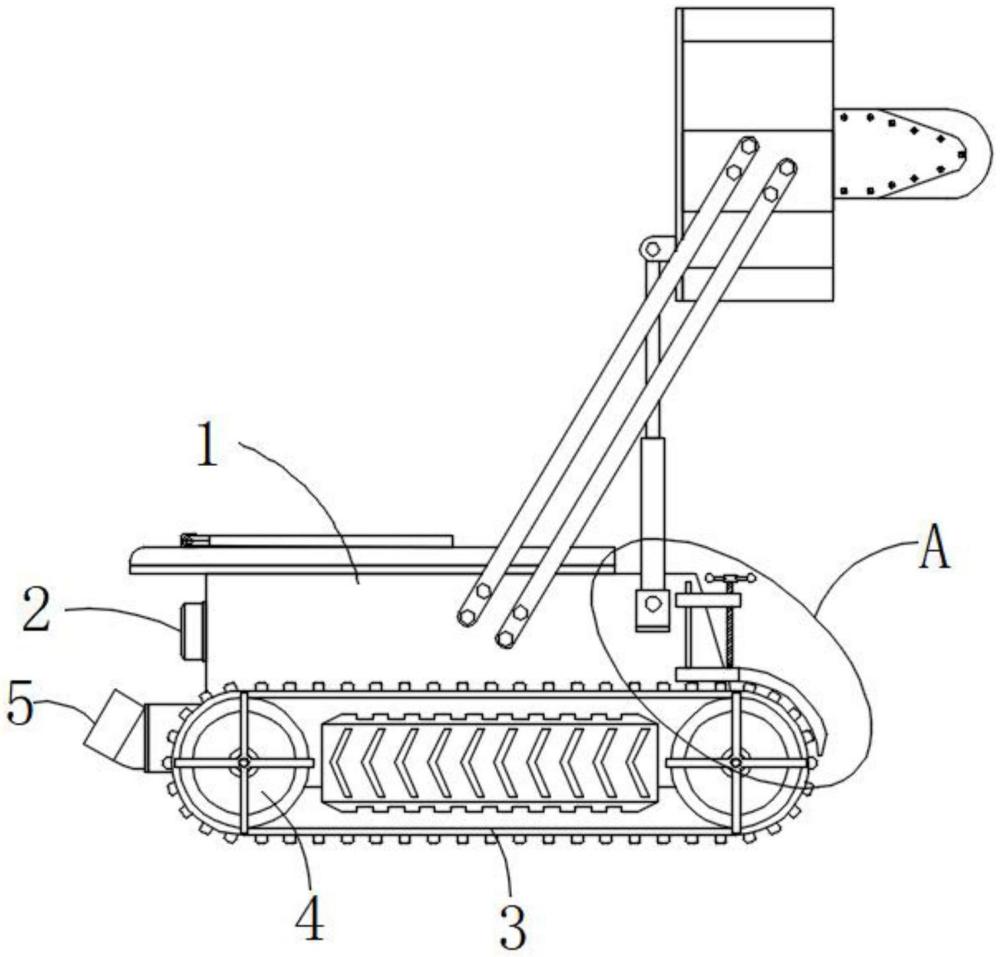
3、一种履带式管道检测机器人,包括检测机器人本体,所述检测机器人本体两端的两侧均安装有滚轮,位于同一端两滚轮的外部套设有履带,所述检测机器人本体左侧且靠近顶端位置处组装有照明灯,位于照明灯下方检测机器人本体的左端安装有检测部。
4、通过采用上述技术方案,检测机器人本体开启后,照明灯起到照明效果,通过检测部检测供水管道中的淤泥情况,在检测机器人本体行进时,滚轮旋转,滚轮带动履带转动他,通过履带的作用提高了检测机器人本体行进时的通过性。
5、可选的,所述检测机器人本体右侧靠近底端的位置处设置有刮板,且刮板的侧视宽度等于检测机器人本体和两刮板之和的侧视宽度。
6、通过采用上述技术方案,通过刮板能够对附着在履带表面的淤泥进行清洁处理。
7、可选的,所述检测机器人本体右侧外壁且靠近顶端的位置处固定有固定板,且固定板上竖直螺纹贯穿有丝杆,且丝杆底端和刮板之间为转动连接,所述丝杆远离刮板一端固定有转柄。
8、通过采用上述技术方案,通过丝杆旋转式刮板上下移动,能够在对履带表面淤泥清理时,刮板靠近履带,此时履带转动时由刮板对履带上方的淤泥进行简单的清洁处理。
9、可选的,所述刮板两端的顶部固定有导杆,且导杆贯穿于固定板。
10、通过采用上述技术方案,刮板在上下移动时,导杆随刮板移动而移动,通过导杆和固定板的配合下提高了刮板上下移动时的平稳性。
11、可选的,所述滚轮远离检测机器人本体一端安装有限位板,所述限位板正视呈“十”字形设置。
12、通过采用上述技术方案,通过限位板能够将履带限位在滚轮上,避免履带在意外的情况下发生位移或倾斜现象。
13、可选的,所述限位板的宽度大于滚轮侧视直径,所述限位板和滚轮之间通过螺栓螺母紧固件为螺纹组装。
14、通过采用上述技术方案,限位板和滚轮之间通过螺栓螺母紧固件构成可拆卸组装,以便于限位板和滚轮之间进行组装。
15、可选的,所述检测机器人本体上左侧的位置处开设有凹槽,位于所述凹槽上方的右侧所述检测机器人本体的顶端固定有两连接块,两连接块之间转动安装有防护板。
16、通过采用上述技术方案,在不使用时,通过防护板对限位板和检测部起到保护作用,减少不使用时因外部因素在意外的情况下对检测部和照明灯造成损坏。
17、可选的,所述凹槽右侧面呈斜面设置,所述防护板侧视宽度大于小于检测机器人本体侧视宽度。
18、通过采用上述技术方案,使防护板旋转在检测部左侧时,呈现倾斜状态,减少防护板对检测部造成的损坏。
19、综上所述,本实用新型包括以下至少一种有益效果;
20、1.通过在滚轮的外部设置履带,通过履带的作用,避免淤泥过多影响检测机器人本体行进,而通过采用履带能够在一定程度上提升检测机器人本体的通过性;
21、2.通过设置有刮板、丝杆、固定板、导杆以及转柄,手动转动转柄,丝杆旋转将刮板上下移动,在检测机器人本体行进时通过刮板的作用,能够对附着在履带表面的淤泥进行简单的清洁处理,避免履带表面附着较多淤泥;
22、3.通过设置有限位板以及螺栓螺母紧固件,限位板通过螺栓螺母紧固件安装在滚轮一侧,在检测机器人本体行进时,通过限位板的作用下对履带起到限位作用,提高了履带在滚轮外部的稳固性。
技术特征:
1.一种履带式管道检测机器人,包括检测机器人本体(1),其特征在于:所述检测机器人本体(1)两端的两侧均安装有滚轮(4),位于同一端两滚轮(4)的外部套设有履带(3),所述检测机器人本体(1)左侧且靠近顶端位置处组装有照明灯(2),位于照明灯(2)下方检测机器人本体(1)的左端安装有检测部(5)。
2.根据权利要求1所述的一种履带式管道检测机器人,其特征在于:所述检测机器人本体(1)右侧靠近底端的位置处设置有刮板(7),且刮板(7)的侧视宽度等于检测机器人本体(1)和两刮板(7)之和的侧视宽度。
3.根据权利要求1所述的一种履带式管道检测机器人,其特征在于:所述检测机器人本体(1)右侧外壁且靠近顶端的位置处固定有固定板(10),且固定板(10)上竖直螺纹贯穿有丝杆(9),且丝杆(9)底端和刮板(7)之间为转动连接,所述丝杆(9)远离刮板(7)一端固定有转柄(11)。
4.根据权利要求2所述的一种履带式管道检测机器人,其特征在于:所述刮板(7)两端的顶部固定有导杆(12),且导杆(12)贯穿于固定板(10)。
5.根据权利要求1所述的一种履带式管道检测机器人,其特征在于:所述滚轮(4)远离检测机器人本体(1)一端安装有限位板(6),所述限位板(6)正视呈“十”字形设置。
6.根据权利要求5所述的一种履带式管道检测机器人,其特征在于:所述限位板(6)的宽度大于滚轮(4)侧视直径,所述限位板(6)和滚轮(4)之间通过螺栓螺母紧固件(8)为螺纹组装。
7.根据权利要求1所述的一种履带式管道检测机器人,其特征在于:所述检测机器人本体(1)上左侧的位置处开设有凹槽(15),位于所述凹槽(15)上方的右侧所述检测机器人本体(1)的顶端固定有两连接块(13),两连接块(13)之间转动安装有防护板(14)。
8.根据权利要求7所述的一种履带式管道检测机器人,其特征在于:所述凹槽(15)右侧面呈斜面设置,所述防护板(14)侧视宽度大于小于检测机器人本体(1)侧视宽度。
技术总结
本技术公开了一种履带式管道检测机器人,涉及检测机器技术领域,包括检测机器人本体,所述检测机器人本体两端的两侧均安装有滚轮,位于同一端两滚轮的外部套设有履带,所述检测机器人本体左侧且靠近顶端位置处组装有照明灯,位于照明灯下方检测机器人本体的左端安装有检测部。本技术使用时,通过在滚轮的外部设置履带,在履带的作用,避免淤泥过多影响检测机器人本体行进,而通过采用履带能够在一定程度上提升检测机器人本体的通过性,同时,通过设置有限位板以及螺栓螺母紧固件,限位板通过螺栓螺母紧固件安装在滚轮一侧,在检测机器人本体行进时,通过限位板的作用下对履带起到限位作用,提高了履带在滚轮外部的稳固性。
技术研发人员:胡靓,朱贵兵,苏善昭,毛晶磊
受保护的技术使用者:上海市供水水表强制检定站有限公司
技术研发日:20230905
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!