一种用于机器人关节的高扭矩谐波减速机的制作方法
本技术涉及谐波减速领域,尤其涉及一种用于机器如关节的高扭矩谐波减速机。
背景技术:
1、机械人手臂是智能化加工的关键部件,机械人手臂上的关节运动又是关键中的关键,机械人手臂上的关节上具有谐波减速机,谐波减速机是关节运动的驱动部件;机器人在工业生产制造山的应型越来越普遍,机器人的运动主要在关节中,在传统的大型工业机器人的关节上“外挂”伺服电机、减速机、制动抱闸机构等,这使得机器人的关节异常庞大,这对大型的机器人并不是什么问题,但是对那些正在被越来越多的应用于生产线和设备周围的小型机器人,尤其是需要配合人完成复杂操作的协作型机器人和移动型机器人,对于谐波减速机的小尺寸、轻质量就有更严格的要求。机械人手臂的关节及配套的谐波减速机部在追求体积小、重量轻的技术要求(关节处体积大、质量重一直为使用方所诟病),体积小、重量轻的谐波减速机将更利于机械人手臂的设计及组装应用。这给谐波减速机的结构设计提出了更高的要求,如何从结构上提供一种体积小、重量轻使得整个机器人本体体积变小,重量变轻、负载变人,是当前急需解决的技术难题。
技术实现思路
1、本实用新型的目的在于解决背景技术存在的技术问题,提供一种用于机器人关节的高扭矩谐波减速机,将角接触球轴承组件限位固定于端侧限位部与端侧限位螺钉之间,主轴承外圈体既承担谐波减速机侧部外壳体,又能实现角接触球轴承组件、柔轮的连接装配,其结构更加紧凑、可靠性更高,能够输出高扭矩;在满足负载扭矩的前提下,外径减小15%-20%,重量上减轻20%以上。
2、本实用新型的目的通过下述技术方案实现:
3、一种用于机器人关节的高扭矩谐波减速机,包括柔轮、主轴承外圈体、波发生器和刚轮,所述主轴承外圈体内部限位装配安装有角接触球轴承组件,角接触球轴承组件内部装配有刚轮;所述柔轮包括固定端部、第一段部和第二段部,柔轮的第一段部与第二段部构成“l”形状,固定端部固定于第一段部端部,固定端部与主轴承外圈体固定连接,所述刚轮内侧具有齿部b,柔轮的第二段部外侧具有与齿部b相对应的齿部a;所述波发生器动力配合安装于柔轮的第二段部内部。
4、为了更好地实现本实用新型,所述角接触球轴承组件包括若干个并排设置的角接触球轴承。
5、进一步的技术方案是:所述角接触球轴承组件包括两个角接触球轴承,两个角接触球轴承分别为角接触球轴承a和角接触球轴承b,所述主轴承外圈体第二端侧具有与角接触球轴承组件的第二端侧配合的端侧限位部,所述主轴承外圈体第一端侧螺纹安装有与角接触球轴承组件的第一端侧配合的端侧限位螺钉。
6、优选地,所述柔轮的固定端部与主轴承外圈体的第二端侧用接触且通过柔轮锁紧螺钉连接固定。
7、优选地,所述刚轮内侧靠近第一端侧位置处设置所述齿部b,所述柔轮的第二段部外侧靠近第一端侧位置处设置所述齿部a。
8、优选地,所述主轴承外圈体内圈与角接触球轴承组件外圈过盈配合且分别涂胶。
9、优选地,所述角接触球轴承组件内圈与刚轮外圈过盈配合且分别涂胶。
10、本实用新型较现有技术相比,具有以下优点及有益效果:
11、(1)本实用新型将角接触球轴承组件限位固定于端侧限位部与端侧限位螺钉之间,主轴承外圈体既承担谐波减速机侧部外壳体,又能实现角接触球轴承组件、柔轮的连接装配,其结构更加紧凑、可靠性更高,能够输出高扭矩;在满足负载扭矩的前提下,外径减小15%-20%,重量上减轻20%以上。
12、(2)本实用新型结构紧凑,特别针对体积和质量要求高的行业,可广泛应用于对机器人关节、关节模组要求重量轻、尺寸小、径向尺寸要求小的协作机器人、移动机器人等,为机器人后续设计更加紧凑,更加节约空间,使机械臂更轻量化。
技术特征:
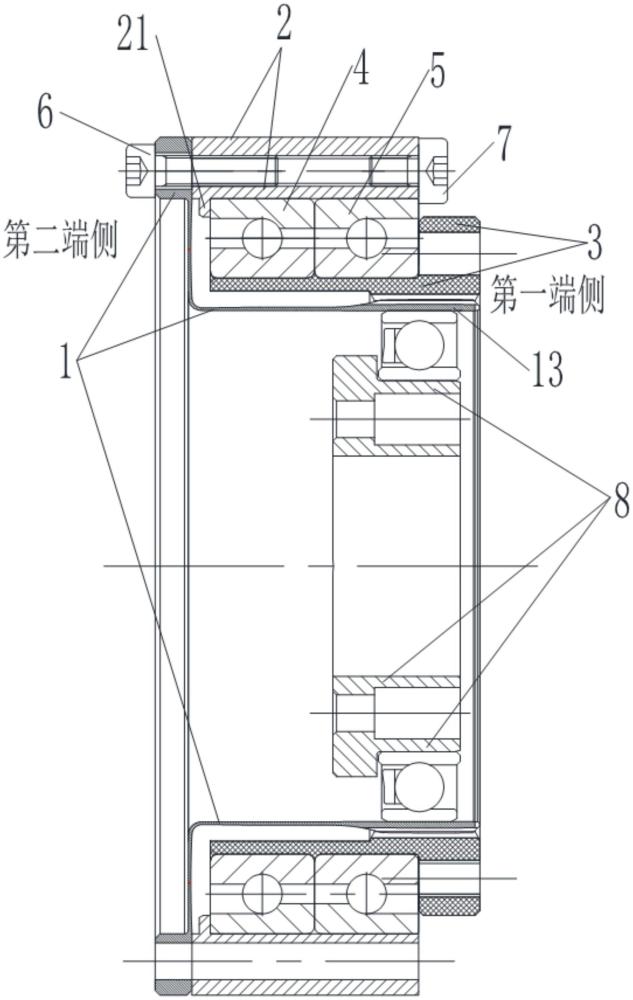
1.一种用于机器人关节的高扭矩谐波减速机,其特征在于:包括柔轮(1)、主轴承外圈体(2)、波发生器(8)和刚轮(3),所述主轴承外圈体(2)内部限位装配安装有角接触球轴承组件,角接触球轴承组件内部装配有刚轮(3);所述柔轮(1)包括固定端部(11)、第一段部(12)和第二段部(13),柔轮(1)的第一段部(12)与第二段部(13)构成“l”形状,固定端部(11)固定于第一段部(12)端部,固定端部(11)与主轴承外圈体(2)固定连接,所述刚轮(3)内侧具有齿部b,柔轮(1)的第二段部(13)外侧具有与齿部b相对应的齿部a(131);所述波发生器(8)动力配合安装于柔轮(1)的第二段部(13)内部。
2.按照权利要求1所述的一种用于机器人关节的高扭矩谐波减速机,其特征在于:所述角接触球轴承组件包括若干个并排设置的角接触球轴承。
3.按照权利要求2所述的一种用于机器人关节的高扭矩谐波减速机,其特征在于:所述角接触球轴承组件包括两个角接触球轴承,两个角接触球轴承分别为角接触球轴承a(4)和角接触球轴承b(5),所述主轴承外圈体(2)第二端侧具有与角接触球轴承组件的第二端侧配合的端侧限位部(21),所述主轴承外圈体(2)第一端侧螺纹安装有与角接触球轴承组件的第一端侧配合的端侧限位螺钉(7)。
4.按照权利要求3所述的一种用于机器人关节的高扭矩谐波减速机,其特征在于:所述柔轮(1)的固定端部(11)与主轴承外圈体(2)的第二端侧面接触且通过柔轮锁紧螺钉(6)连接固定。
5.按照权利要求3所述的一种用于机器人关节的高扭矩谐波减速机,其特征在于:所述刚轮(3)内侧靠近第一端侧位置处设置所述齿部b,所述柔轮(1)的第二段部(13)外侧靠近第一端侧位置处设置所述齿部a。
6.按照权利要求1所述的一种用于机器人关节的高扭矩谐波减速机,其特征在于:所述主轴承外圈体(2)内圈与角接触球轴承组件外圈过盈配合且分别涂胶。
7.按照权利要求1所述的一种用于机器人关节的高扭矩谐波减速机,其特征在于:所述角接触球轴承组件内圈与刚轮(3)外圈过盈配合且分别涂胶。
技术总结
本技术公开了一种用于机器人关节的高扭矩谐波减速机,包括柔轮、主轴承外圈体、波发生器和刚轮,主轴承外圈体内部限位装配安装有角接触球轴承组件,角接触球轴承组件内部装配有刚轮;柔轮包括固定端部、第一段部和第二段部,固定端部固定于固定端部端部,固定端部与主轴承外圈体固定连接,刚轮内侧具有齿部B,柔轮的第二段部外侧具有与齿部B相对应的齿部A;波发生器动力配合安装于柔轮的第二段部内部。本技术将角接触球轴承组件限位固定于端侧限位部与端侧限位螺钉之间,主轴承外圈体既承担谐波减速机侧部外壳体,又能实现角接触球轴承组件、柔轮的连接装配,其结构更加紧凑、可靠性更高,能够输出高扭矩。
技术研发人员:肖云强,钱万勇,黄粮钧,黄唯峻,黄廷亮,李进伟
受保护的技术使用者:成都瑞迪智驱科技股份有限公司
技术研发日:20230911
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!